

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
От Математической модели к автоматизированному производству приводов нового поколения
, кандидат технических наук
, кандидат технических наук
, аспирант
Современный рынок в целом и машиностроение в частности предъявляют высокие требования к конкурентным преимуществам производимой продукции, в том числе к современной приводной технике различного назначения. Обеспечение таких преимуществ опирается на решении проблемы создания высококачественной и высокоэффективной продукции при минимизации затрат времени и средств на ее производство. Одним из известных решений в этой области является использования принципа сквозного проектирования, обеспечивающего существенное сокращение сроков постановки новых изделий на производство. Актуальность разработок, исследование и проектирование в единой проектной среде (САПР), в том числе разработка управляющих программ для обрабатывающих систем - основные составляющие формулы успешного внедрения в производство новых решений.
Актуальная задача создания прогрессивной приводной техники является важной частью критических технологий, которая во многом определяет конкурентоспособность ключевых отраслей промышленности и направлений деятельности человека. Решение такой задачи, должно опираться, в том числе на совершенствование существующих и создание новых конструктивных и технологических решений. В этой связи, наряду с разработкой принципиально новых конструкций приводов, проводятся исследования направленные на повышение качественных показателей как новых, так и традиционных планетарных механизмов, разрабатываются новые технологические решения и оборудование, совершенствуются методы проектирования.
Одним из актуальных и эффективных решений в области прогрессивной приводной техники является локализация контакта в зацеплениях планетарных передач, которой можно добиться путем применения арочной формы зубьев колес.
Известно, что арочная форма зубьев позволяет повысить нагрузочную способность передачи вследствие увеличения изгибной и контактной прочности, снижения динамических нагрузок при более равномерном распределений нагрузок в зацеплениях за счёт локализации контакта и самоустановки колёс, что позволяет создавать высокоэффективные, тяжелонагруженные планетарные передачи для высокоскоростных транспортных систем [6].
В настоящее время с развитием автоматизированного оборудования с программным управлением, открываются новые возможности для производства колес с внутренними и внешними арочными зубьями. В частности, оказывается возможным эффективное использование существующих станков с программным управлением и создание принципиально новых конструкций автоматизированного оборудования для различных высокотехнологичных и современных типов производства.
В ИжГТУ им. с 2005 года разрабатываются комплексные решения позволяющие осуществлять сквозное проектирование планетарных передач с локализованным контактом нового поколения от математического моделирования до автоматизированной подготовки управляющих программ для автоматизированного оборудования. Полученные результаты опираются на решение трех основных задач: математическое моделирование - создание математических моделей позволяющих осуществлять исследование, расчет и синтез рациональных параметров пространственных зацеплений из условий высоких показателей качества [1, 2, 3, 4], разработка САПР - создание системы автоматизированного проектирования класса CAD/CAM для серийной разработки и постановки на производство гаммы приводов [5], создание оборудования с ЧПУ - разработка методов и средств производства колес с арочными зубьями на основе использования стандартного и специализированного оборудования с программным управлением [6].
Математическое моделирование.
Разработаны методы математического и компьютерного моделирования теоретически точных поверхностей наружных и внутренних арочных зубьев на основе математических моделей станочных зацеплений, получены модели пространственных зацеплений планетарной передачи, осуществлен синтез рациональных геометрических параметров.
а)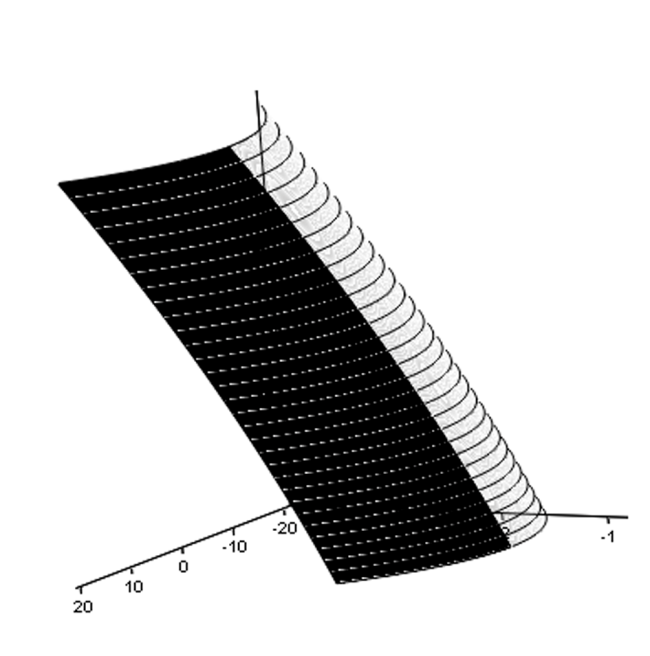 б)
б)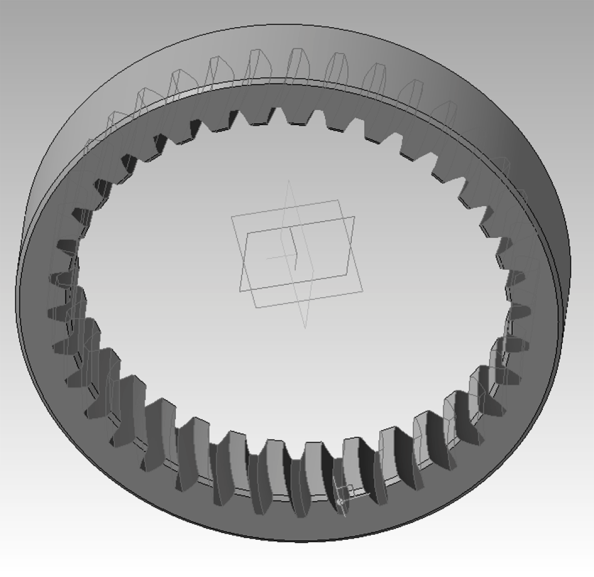
в) г)
г)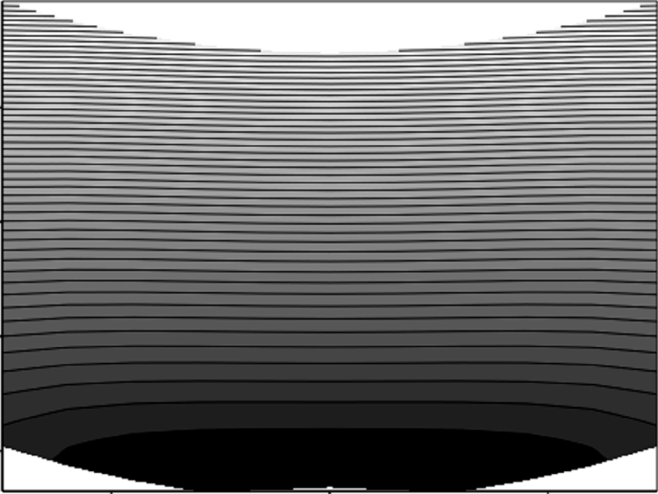
Рисунок 1. Компьютерные модели поверхности внутреннего зуба (а), колеса с внутренними арочными зубьями (б), внутреннего арочного зацепления колес (в), поля зазоров в начале фазы зацепления (г)
Разработка САПР.
Задача исследования локализованного контакта арочных зубьев колес в планетарных передачах не может быть решена при использовании стандартных САПР. Наиболее эффективным инструментом создания модулей автоматизированного расчета в исследовательских задачах остаются системы инженерных и математических расчетов (MathCAD, Mathematica, и др.), обеспечивающие необходимую степень свободы исследователя от работы с программным кодом. Однако решение в таких системах сложных задач, связанных с большими объемами вычислений, часто оказывается невозможным или низкопроизводительным. В этой связи развиваются интегрированные программные решения, в которых комбинируются возможности систем инженерных и математических расчетов и других программ.
Примером реализации такого подхода является программный комплекс автоматизированного расчета и моделирования планетарных передач с локализованным контактом MathPLAN разработанный в ИжГТУ им. .
Ядром комплекса являются программные модули геометрического расчета, синтеза рациональных параметров, моделирования зацеплений и полей зазоров во всех фазах внешнего и внутреннего зацеплений, реализованные в среде MathCAD. Управление сложными многоуровневыми итерационными вычислениями, процессами передачи данными между модулями, настройками и хранением проекта осуществляет специально разработанная проектная среда сквозного проектирования.
Система позволяет осуществлять автоматизированный расчет рациональных параметров, компьютерное моделирование пространственных зацеплений в статике и динамике, моделирование процесса формообразования, генерацию управляющей программы для нарезания зубьев на станке с ЧПУ. При этом управляющая программа для обеспечения заданной степени локализации контакта может быть подготовлена только на основе математического моделирования станочного зацепления и расчета мгновенных значений
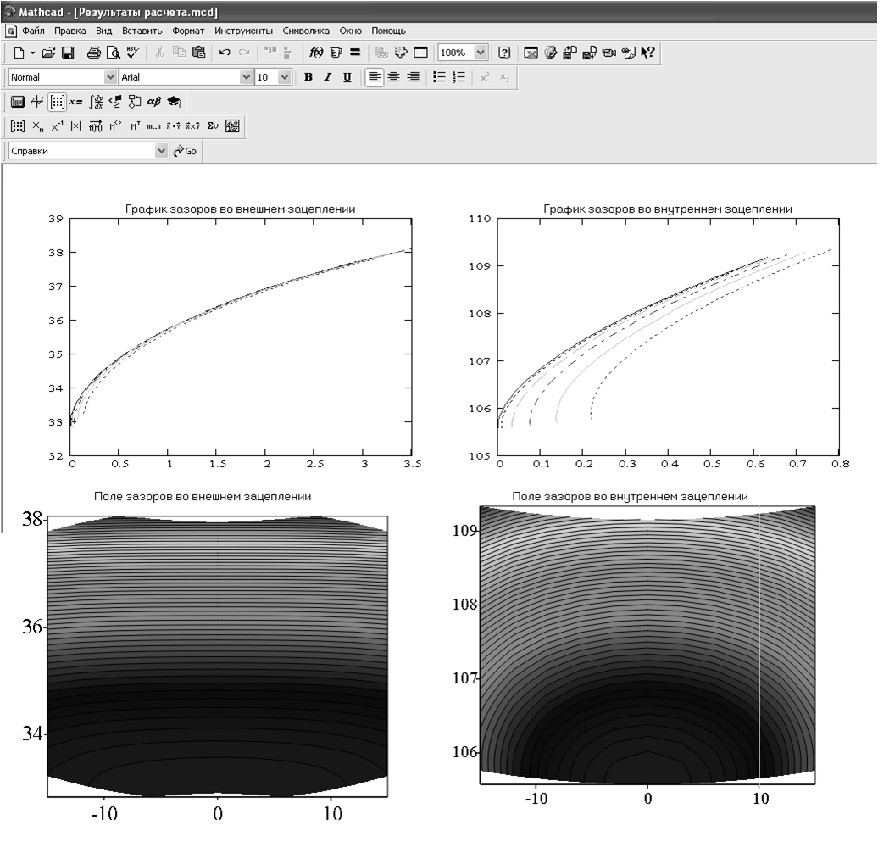
динамической коррекции радиуса качения долбяка.
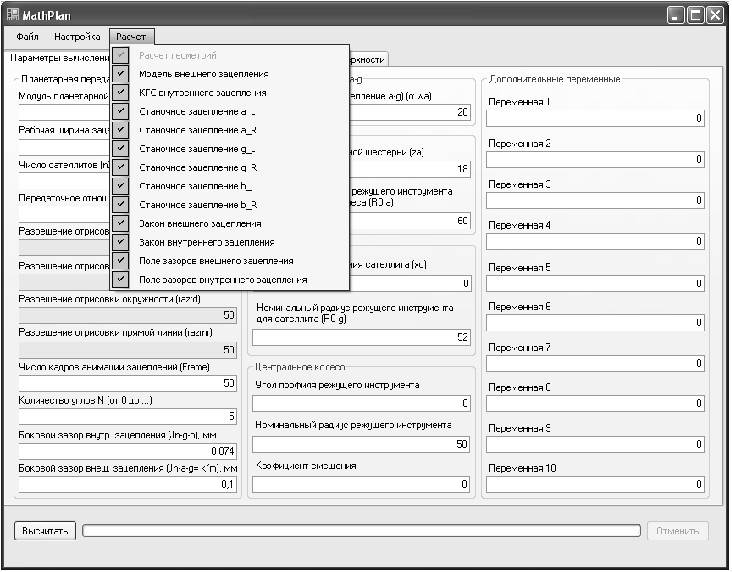
Рисунок 2. Программный модуль "МАТПЛАН"
Оборудование с ЧПУ.
Создан действующий прототип зубодолбежного станка с программным управлением (рис. 3). Установлено, что для нарезания методом имитации обката с «остановленным» долбяком и периодическим делением достаточно использовать 4-х координатные станки с программным управлением фрезерной и расточной групп, многоцелевые обрабатывающие центры и другое аналогичное оборудование, позволяющее реализовать программируемое перемещение по трем осям (дискретность не больше 0,005 мм.) и программируемый поворот вокруг одной из осей (дискретность не больше 3’’), что позволяет обработать зубья колес до 7-й степени точности.
Разработана конструкция промышленного исполнения зубодолбежного станка с горизонтальным расположением оси обрабатываемой заготовки (рис. 4), что позволило рационально распределить массу узла качения долбяка в пространстве, повысить надежность и жесткость конструкции, улучшить условия работы привода главного движения. Для снижения стоимости изготовления и эксплуатации станка он укомплектован стандартными направляющими, сервоприводами, 8-ми координатной системой управления 6-ть из которых используются для управления процессом обработки, остальные являются резервными и могут быть использованы для управления периферийными транспортными системами. Станок позволяет обрабатывать прямые и арочные, внешние и внутренние зубья с заданной степенью локализации контакта.
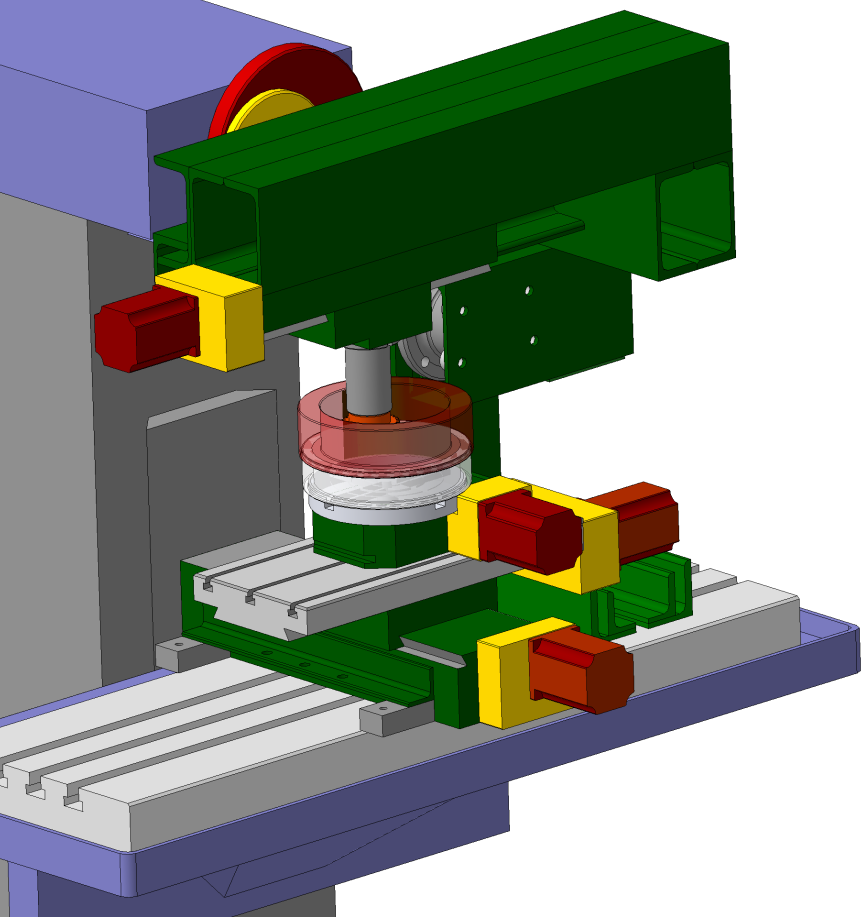


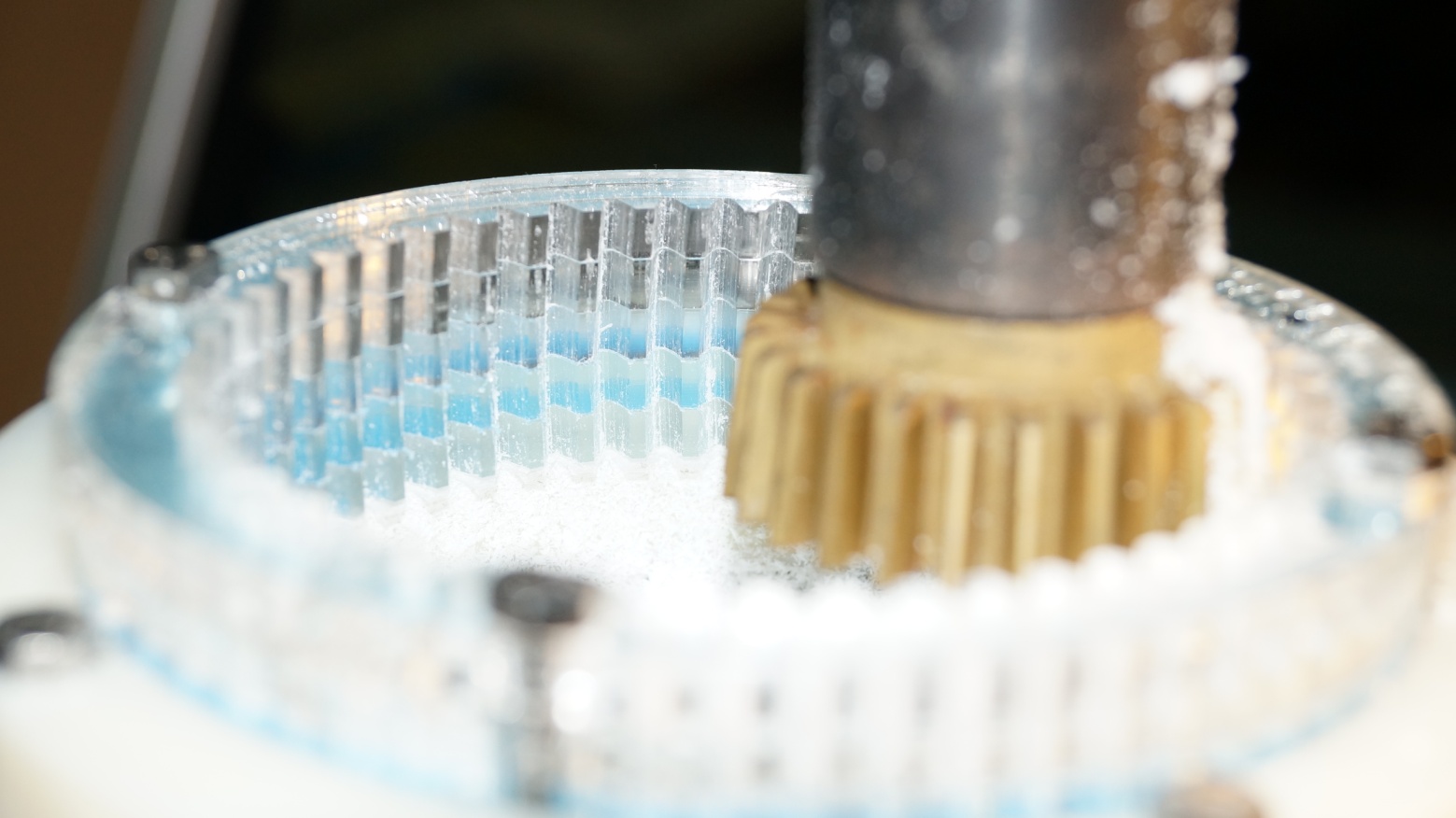
Рисунок 3. Действующий прототип станка (4-е программируемые оси).
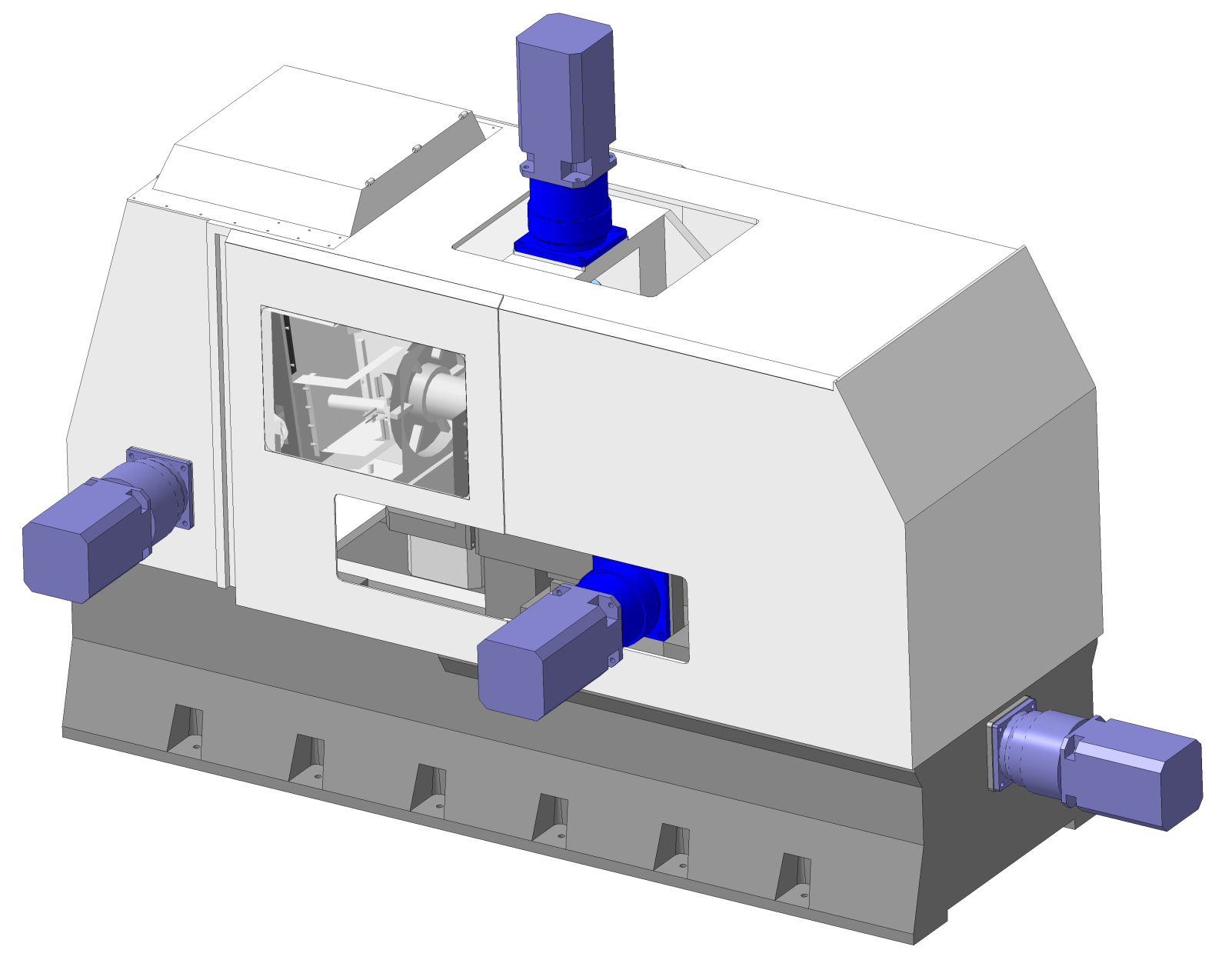
Рисунок 4. Широкоуниверсальный зубообрабатывающий станок с программным управлением.
Starting from the mathematical model to automated production DRIVES NEW GENERATION
Kuznetsov V. S, candidate of the technical sciences, Associate Professor of GIEI IzhSTU named MT Kalashnikov, The Glazov branch of The Izhevsk State Technical University named MT Kalashnikov, v. *****@***ru;
Mogilnikov E. V, candidate of the technical sciences, Associate Professor of GIEI IzhSTU named MT Kalashnikov, The Glazov branch of The Izhevsk State Technical University named MT Kalashnikov, *****@***ru
Lekomcev A. V, graduate student IzhSTU of GIEI IzhSTU named MT Kalashnikov, The Glazov branch of The Izhevsk State Technical University named MT Kalashnikov
Summary: The article presents the results of research aimed at the development of methods and means of designing and manufacturing planetary drive a new generation with localized contact arched wheel teeth.
Key words: planetary gears, mathematical models, localization contact, arched teeth, CAD, computer-controlled equipment
, кандидат технических наук, доцент кафедры «СИН», Глазовский инженерно-экономический институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Ижевский государственный технический университет им. », v. *****@***ru;
, кандидат технических наук, доцент кафедры «АСУ», Глазовский инженерно-экономический институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Ижевский государственный технический университет им. », *****@***ru
, аспирант федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Ижевский государственный технический университет им. »
Аннотация: В статье приведены результаты исследований направленных на создание методов и средств проектирования и производства планетарных приводов нового поколения с локализованным контактом арочных зубьев колес.
Ключевые слова: Планетарные приводы, математические модели, локализация контакта, арочный зуб, САПР, оборудование с программным управлением
