

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Опыт следует повторить, по крайне мере, два раза при воздействиях одного знака (направления) и затем направление (знак) изменить. Разгонная характеристика будет считаться полученной при удовлетворительном совпадении результатов. Для нелинейных ОР опыт проводят при нескольких, обычно трех, различных нагрузках ОР.
Разгонная характеристика одноемкостного объекта регулирования с самовыравниванием.
Способность объекта регулирования приходить после воздействия на него в новое установившееся состояние называется свойством самовыравнивания ОР.
У ОР с самовыравниванием каждому положению регулировочного органа или значению нагрузки (возмущающему воздействию) соответствует свое установившееся значение регулируемого параметра, согласно величине воздействия.
Разгонные характеристики приведены на рис. 1.
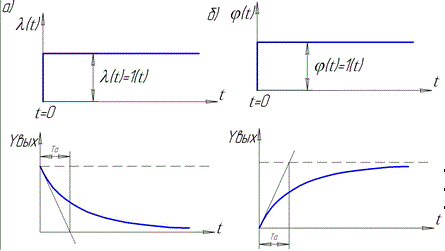
Рис. 1 - Разгонные характеристики:
а) при возмущающем воздействии,
б) при управляющем воздействии.
Особенность одноемкостных ОР в том, что скорость изменения yвых максимальна с момента нанесения воздействия. Параметры разгонных характеристик, по которым оценивают динамические свойства ОР (Рис. 2):
Та - время разгона для ОР-время, в течении которого регулируемый параметр изменится от своего начального значения в момент времени t0 до заданного значения, отвечающему величине воздействия, с постоянной максимальной скоростью, соответствующей наибольшему небалансу.
Для определения Та проводят касательную к кривой разгона из точки t=0. Касательная отсекает отрезок на оси времени, при пересечении касательной и заданного значения регулируемой величины, определяемого величиной воздействия. Практика получения и обработки разгонных характеристик показывает, что для одноемкостных ОР с самовыравниванием время разгона Та соответствует времени, прошедшему от момента возникновения возмущения до момента достижения регулируемой величины значения, равного 0,633 потенциального значения.
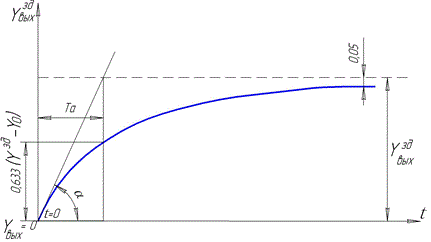
Рис. 2 Параметры разгонных характеристик, по которым оценивают динамические свойства ОР
Практическое занятие № 10. Определение коэффициента перерегулирования системы автоматического управления.
Студент должен:
уметь
- составлять структурные схемы, схемы автоматизации, схемы соединений и подключений;
знать
- структурно-алгоритмическую организацию систем управления, их основные функциональные модули, алгоритмы управления систем автоматизации
Краткие теоретические сведения
1 Основные понятия
Всякий рабочий процесс, требующий управления, имеет одну или несколько величин, которые необходимо поддерживать постоянным или изменять по некоторому закону. Чаще всего требуется регулировать одну величину.
Величина, значение которой требуется поддерживать постоянной или изменять надлежащим образом, называется управляемой или выходной величиной системы автоматического регулирования (САР).
Процесс, принуждающий выходную величину принимать заданные значения, называется процессом управления, а устройством, которым необходимо регулировать заданный процесс, - объектом управления (ОУ). Техническое устройство, с помощью которого осуществляется управление объектом, называется управляющим устройством (УУ) или регулятором. Совокупность объекта управления и управляющего устройства представляет собой систему управления.
Система управления называется автоматической, если основные функции управления, необходимые в процессе работы системы для достижения цели управления, осуществляются в ней без непосредственного участия человека.
На рис. 1 показана простейшая система автоматического регулирования.
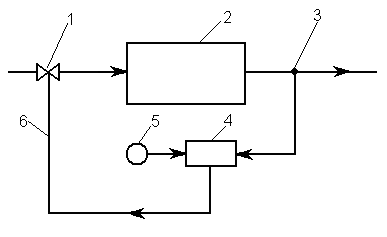
Рис.1 Система автоматического регулирования
На объект 2 поступает энергия через регулирующий орган 1. В объекте 2 энергия преобразуется или перерабатывается и выдается потребителю. Из точки 3 часть энергии, отдаваемой потребителю, или сигнал, пропорциональный величине этой энергии, передается на регулятор 4. От задатчика 5 в регулятор передается сигнал задания.
Величины сигнала задания и сигнала, характеризующего выходной параметр объекта, сравниваются, и если они не равны, то появляется сигнал рассогласования регулятора. Этот сигнал управляет регулирующий орган 1. Регулирующий орган перемещается так, чтобы разница между выходным параметром объекта и заданием регулятора уменьшалась.
Система регулирования может находиться в двух состояниях – установившимся и переходном. Если величины сигналов регулируемого параметра и задания равны, то воздействие на регулятор равно нулю. В этом случае регулятор не оказывает воздействие на процесс. Такое состояние системы регулирования называется установившимся. При появлении сигнала рассогласования система выходит из установившегося состояния. Начинается процесс регулирования, который называется переходным.
Возмущением системы регулирования называют воздействия на систему, которые приводят к отклонению регулируемого параметра от заданной величины.
По закону изменения выходной величины САР бывают:
- стабилизирующая: предписанное значение выходной переменной является неизменным;
- программная: выходная переменная изменяется по определённой, заранее заданной программе;
- следящая: предписанное значение выходной переменной зависит от значения неизвестной заранее переменной на входе автоматической системы.
Свойства и характеристики регуляторов
Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать:
Характеристику объекта регулирования по запаздыванию, инерционности, по степени регулируемости. Статические и динамические характеристики объекта управления. Требования к качеству процесса регулирования. Показатели качества регулирования для непрерывных регуляторов. Характер возмущений, действующих на процесс регулирования.Статическая характеристика - это зависимость установившихся значений выходной величины от значения величины на входе системы, изображают в виде кривой У(Х) (см рис. 2)
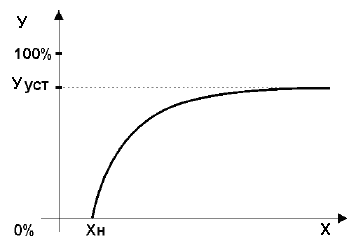
Рис.2 Статическая характеристика САР
Для определения динамических характеристик объекта регулирования - коэффициента усиления (передачи) объекта Ко, постоянной времени объекта Т и запаздывания фd на практике чаще пользуются экспериментальными методами, поскольку зависимость между входной и выходной величиной (переходная характеристика или кривая разгона) легче получить именно таким способом.
Динамические характеристики САР связаны с переходным процессом. Переходный процесс - это переход системы от одного установившегося режима к другому при каких-либо входных воздействиях. Переходные процессы изображаются графически в виде кривой У(t). (см рис.3)
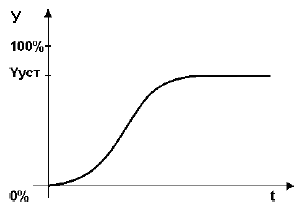
Рис.3 Переходный процесс САР
Переходный процесс характеризует динамические свойства системы и ее поведение. Поскольку входные воздействия могут изменяться во времени, то и переходные характеристики будут каждый раз разные. Для простоты анализа систем входные воздействия X(t) приводят к одному из типовых видов, представленных на рис.4:
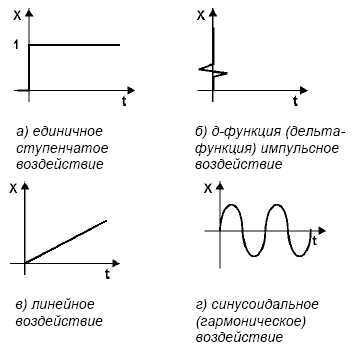
Рис.4 Виды входных воздействий
Определение динамических характеристик
Определение динамических характеристик объектов по кривой разгона производится методом касательной к точке перегиба переходной характеристики (кривой разгона). Точка перегиба соответствует переходу кривой от режима ускорения к режиму замедления темпа нарастания выходного сигнала.
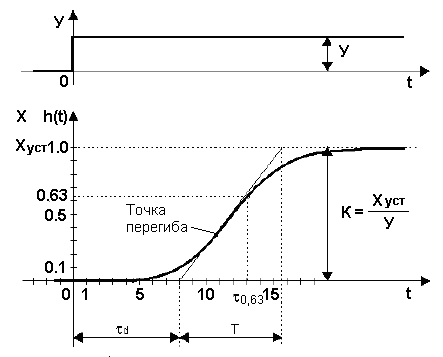
Рис.5 Переходная характеристика (кривая разгона) объекта
По виду переходной характеристики можно определить динамические свойства объекта: К, Хуст, фd, Т, R.
Динамическим коэффициентом усиления называется величина, показывающая, во сколько раз данное звено усиливает входной сигнал (в установившемся режиме), и равна отношению величины технологического параметра Хуст в установившемся режиме к выходной величине У:K= Хуст / У (1)
2) Установившееся значение выходной величины Хуст - это значение Х при t → ∞, т. е. максимальное значение температуры в печи, которое может быть достигнуто при установленной мощности нагревателя.
3) В системах автоматического регулирования, после получения возмущающего воздействия регулируемый параметр изменяется не мгновенно, а через некоторое время. Это время называется запаздыванием фd процесса в объекте и равно
времени, за которое температура в печи достигнет значения ≈0,1Хуст.
Чем больше, время полного запаздывания фd - тем труднее регулировать такой процесс. Из наиболее часто регулируемых параметров наибольшим - запаздыванием обладают объекты, в которых регулируется температура, а наименьшим - объекты, в которых поддерживается расход жидкости.
4) Постоянная времени объекта Т может быть определена в соответствии с рис.5. Постоянная времени объекта достаточно точно может быть определена как время, за которое температура достигнет значения 0,63Хуст минус фd1 , т. е.:
Т = ф0,63 - фd1 (2)
5) Максимальная скорость изменения параметра R - наклон переходной характеристики, может быть определено по формуле:
R = Xуст / Т (3)
3. Порядок выполнения работы
3.1 Подготовка к выполнению работы
Установить положение ручки регулятора температуры РТ в левое крайнее положение (в положение 0). Подать напряжение питания на контрольно-измерительные приборы стенда. Проверить подключение приборов Ш79, М 1730 МК, А542 по индикаторам питания. Произвести прогрев приборов не менее 30 мин. Изучить техническую документацию используемых контрольно - измерительных приборов. Произвести пробный запуск стенда: вращая ручку регулятора температуры РТ по часовой стрелке и обратно убедиться в срабатывании пускателя ПМЕ-112 и включении индикаторной лампочки включения печи (т. е. подачи напряжения питания на объект регулирования).
3.2 Выполнение работы
На диаграммной бумаге самопишущего прибора А542 отметить точное время начала выполнения лабораторно-практической работы. Снятие переходной характеристики 2.1 Ручку регулятора температуры РТ установить в положение 100єС, одновременно включить секундомер. 2.2 Фиксировать температуру печи с интервалом 5 мин до стабилизации параметра (индикация по выключению лампочки печи).
Примечание: для определения времени запаздывания фd необходимо в начальный момент времени включения печи запись температуры и времени производить более тщательно.
2.3 Построить график переходной характеристики T = f(t)где: Т – температура, єС
t – время, мин
2.4 По формулам (1), (2) и (3) произвести расчет динамического коэффициента усиления, постоянную времени объекта и максимальную скорость изменения параметра.
Снятие импульсной характеристики объекта регулирования. (переходного процесса при единичном ступенчатом воздействии)3.1 Ручку регулятора температуры РТ установить в положение 140єС,
3.2 Повторить пп 2.2 и 2.3
4. Определение влияния возмущающего воздействия на объект регулирования.
4.1 При температуре печи 140єС открыть дверцу печи на время 1 – 2 мин и снова закрыть, фиксируя при этом температуру и время проведения эксперимента.
4.2 Построить график T = f(t) при влиянии возмущающего воздействия
4.3 Оценить влияние возмущающего воздействия на объект регулирования.
4. Завершение работы
На диаграммной бумаге самопишущего прибора А542 отметить точное время окончания выполнения лабораторно-практической работы. Отключить от питающей сети контрольно-измерительные приборы стенда измерения и регулирования температуры. Извлечь лентопротяжный механизм самопишущего прибора А542 и по отметкам «начало» и «окончание» выполнения лабораторно-практической работы, определить скорость движения диаграммной ленты. Результаты расчета сравнить с номинальной скоростью перемещения диаграммы в соответствии с паспортными данными на прибор. Стенд для регулирования, измерения и регистрации температуры привести в исходное состояние. Оформить результаты проведения лабораторно-практической работы.
5. Обработка результатов проведения работы
Заполнить табл. 4,5,6,7 в соответствии с результатами проведения лабораторно-практической работы:
Снятие переходной характеристики
Табл.4
Время, мин | Температура, єС |
Снятие импульсной характеристики
Табл.5
Время, мин | Температура, єС |
Определение влияния возмущающего воздействия
Табл.6
Время, мин | Температура, єС |
Требования к отчёту по работе
Каждый учащийся составляет индивидуальный письменный отчёт о проделанной работе объёмом 4-5 страниц, в котором должны быть отражены следующие материалы:
а) изложение принципов действия контрольно-измерительных приборов стенда автоматического регулирования, измерения и регистрации температуры;
б) принципиальные схемы подключения приборов, схема лабораторной установки;
в) краткое описание методики снятия переходной и импульсной характеристик регулятора, а также определение влияния возмущающего воздействия на объект регулирования;
г) таблицы и графики T = f(t) различных режимов работы регулятора, определения скорости движения диаграммной ленты самопишущего прибора.
Указания по технике безопасности
1. Следует иметь в виду, что стенд автоматического регулирования, измерения и регистрации температуры питается от сети переменного тока напряжением 220 В.
2. Изучать контрольно-измерительные приборы стенда и производить необходимые соединения только при отключенном питании 220 В.
3. Схемы, собранные учащимися, включаются в работу только в присутствии мастера производственного обучения.
4. Запрещается извлекать лентопротяжный механизм самопишущего прибора, если он находится под напряжением.
Контрольные вопросы
На чём основано принцип действия термометров сопротивления? Каким классом точности обладают контрольно-измерительные приборы стенда автоматического регулирования, измерения и регистрации температуры? Что такое разгонная и импульсная характеристика регулятора? Что называется возмущением объекта регулирования?

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
