


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТРЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧЕРЕЖДЕНИЕ
ВЫСШЕГО ОБРАЗОВАНИЯ
«БРАТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Кафедра управление в технических системах
Курсовая работа
По дисциплине
«Компьютерные технологии»
Курсовая работа
По дисциплине «Компьютерные технологии»
По теме: «Применение среды «MATLAB» для математической и статистической обработки данных и моделирование объектов в пакете Simulink»
Вариант №11
Выполнил:
Студент группы МТС-16
Проверил:
Ст. Преподаватель
Братск 2017
Содержание | |
Задание | 2 |
Введение | 6 |
| Дать общую характеристику пакета расширения системы MATLAB - System Identification Toolbox (назначение пакета, сфера применения, возможности рассматриваемого пакета, основные функции) | 7 |
| Протабулировать функции | 8 |
| Построить графики функций | 9 |
| Решить системы алгебраических уравнений с помощью матричного способа (4-х операторов), с помощью команды solve и путем построения эквивалентной модели | 10 |
| Вычислить значения интеграла методами трапеций и Симпсона. Также найти первую и третью производные представленных функций | 16 |
| Решить нелинейное уравнение графическим способом, с помощью функции fzero (fsolve) | 19 |
| Найти координаты минимального и максимального значений функции f(x) на [a;b]: | 20 |
| Построить и оформить: | 24 |
| Провести вычисления по заданной формуле при заданных значениях параметров, представив последовательность действий: | 26 |
| Решить уравнения графически, с помощь функции solve и с помощью функции roots | 26 |
| Создать аналогичную модель объекта в среде SIMULINK, провести моделирование. Результаты представить в отчете | 30 |
| Заключение | 31 |
| Список используемых источников | 32 |
Введение
MATLAB - это высокопроизводительный язык для технических расчетов. Он включает в себя вычисления, визуализацию и программирование в удобной среде, где задачи и решения выражаются в форме, близкой к математической. Типичное использование MATLAB — это:
· математические вычисления
· создание алгоритмов
· моделирование
· анализ данных, исследования и визуализация
· научная и инженерная графика
· разработка приложений, включая создание графического интерфейса
MATLAB - это интерактивная система, в которой основным элементом данных является массив. Это позволяет решать различные задачи, связанные с техническими вычислениями, особенно в которых используются матрицы и вектора.
В MATLAB важная роль отводится специализированным группам программ, называемых toolboxes. Они очень важны для большинства пользователей MATLAB, так как позволяют изучать и применять специализированные методы.
Simulink – это графическая среда имитационного моделирования, позволяющая при помощи блок-диаграмм в виде направленных графов, строить динамические модели, включая дискретные, непрерывные и гибридные, нелинейные и разрывные системы. Интерактивная среда Simulink, позволяет использовать уже готовые библиотеки блоков для моделирования электросиловых, механических и гидравлических систем, а также применять развитый модельно-ориентированный подход при разработке систем управления, средств цифровой связи и устройств реального времени. Дополнительные пакеты расширения Simulink позволяют решать весь спектр задач от разработки концепции модели до тестирования, проверки, генерации кода и аппаратной реализации. Simulink интегрирован в среду MATLAB, что позволят использовать встроенные математические алгоритмы, мощные средства обработки данных и научную графику.
1. Дать общую характеристику пакета расширения системы MATLAB - System Identification Toolbox (назначение пакета, сфера применения, возможности рассматриваемого пакета, основные функции).
Пакет System Identification содержит средства для создания математических моделей динамических систем на основе наблюдаемых входных и выходных данных. Он имеет гибкий графический интерфейс, помогающий организовать данные и создавать модели. Методы идентификации, входящие в пакет, применимы для решения широкого класса задач, от проектирования систем управления и обработки сигналов до анализа временных рядов и вибрации. Основные свойства пакета:
простой и гибкий интерфейс; предварительная обработка данных, включая предварительную фильтрацию, удаление трендов и смещений; О выбор диапазона данных для анализа; методы авторегрессии; анализ отклика во временной и частотной области; отображение нулей и полюсов передаточной функции системы; анализ невязок при тестировании модели; построение сложных диаграмм, таких как диаграмма Найквиста и др.Графический интерфейс упрощает предварительную обработку данных, а также диалоговый процесс идентификации модели. Возможна также работа с пакетом в командном режиме и с применением расширения Simulink. Операции загрузки и сохранения данных, выбора диапазона, удаления смещений и трендов выполняются с минимальными усилиями и находятся в главном меню.
Представление данных и идентифицированных моделей организовано графически таким образом, что в процессе интерактивной идентификации пользователь легко может вернуться к предыдущему шагу работы. Для новичков существует возможность просматривать следующие возможные шаги. Специалисту графические средства позволяют отыскать любую из ранее полученных моделей и оценить ее качество в сравнении с другими моделями.
Начав с измерения выхода и входа, можно создать параметрическую модель системы, описывающую ее поведение в динамике. Пакет поддерживает все традиционные структуры моделей, включая авторегрессию, структуру Бокса-Дженкинса и др. Он поддерживает линейные модели пространства состояний, которые могут быть определены как в дискретном, так и в непрерывном пространстве. Эти модели могут включать произвольное число входов и выходов. В пакет включены функции, которые можно использовать как тестовые данные для идентифицированных моделей. Идентификация линейных моделей широко используется при проектировании систем управления, когда требуется создать модель объекта. В задачах обработки сигналов модели могут быть использованы для адаптивной обработки сигналов. Методы идентификации успешно применяются и для финансовых приложений.
2. Про табулировать функции
№ п/п | Функция
| a | b |
|
|
|
1 |
| - | - | 0.11 | 0.36 | 0.05 |
2 |
| 2.25 | - | 1.2 | 2.7 | 0.3 |
3 |
| - | - | 0 | 1.2 | 0.12 |
Первая функция:
>> x1=0.11:0.05:0.36;
>> y1=((sin(x1)).^3+(cos(x1)).^3).*log(x1)
y1 =
-2.1704 -1.7707 -1.4742 -1.2386 -1.0448 -0.8822
Вторая функция:
>> x2=1.2:0.3:2.7;
>> a=2.25;
>> y2=(a.^(x2.^2-1))-(log10(x2.^2-1))+((x2.^2-1).^(1/3))
y2 = 2.5459 3.7360 7.1084 16.8558 48.4712 165.1924
Третья функция:
>> x3=0:0.12:1.2;
>> sh=(exp(x3)-exp(-x3))./2;
>> y3=sqrt(sh.*(sqrt(2*pi*x3)))
y3 = 0 0.3232 0.5455 0.7438 0.9306 1.1118 1.2912 1.4713 1.6544 1.8420 2.0359
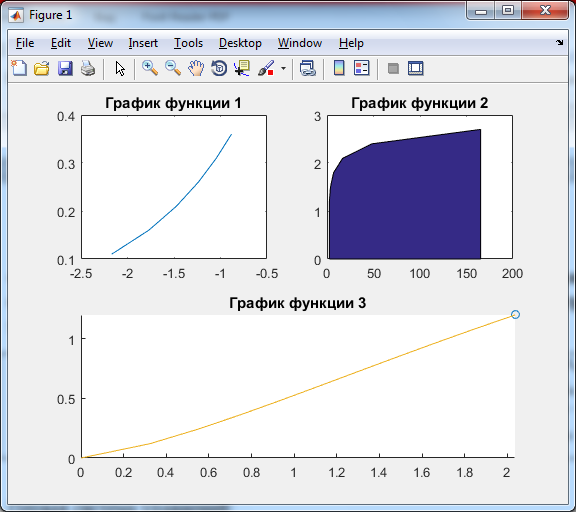
3. Построить графики функций из п.2 самостоятельно выбрав тип графиков и, разбив графическое окно на требуемое количество подокон. Сделать необходимые надписи на графиках
subplot(2,2,1); plot(y1,x1); title 'График функции 1'
subplot(2,2,2); area(y2,x2); title 'График функции 2'
subplot(2,2,3:4); comet(y3,x3); title 'График функции 3'
4. Решить системы алгебраических уравнений с помощью матричного способа (4-х операторов), с помощью команды solve и путем построения эквивалентной модели
1 |
| 2 |
|


Первая система уравнений:
1) >> A=[3.2 5.4 4.2 2.2;2.1 3.2 3.1 1.1;1.2 0.4 -0.8 -0.8;4.7 10.4 9.7 9.7];
>> B=[2.6;4.8;3.6;-8.4];
X=A\B
X =
5.0000 -4.0000 3.0000 -2.0000
2) X=inv(A)*B
X =
5.0000 -4.0000 3.0000 -2.0000
3) >> A=[3.2 2.1 1.2 4.7;5.4 3.2 0.4 10.4;4.2 3.1 -0.8 9.7;2.2 1.1 -0.8 9.7];
>> B=[2.6 4.8 3.6 -8.4];
>> X=B/A
X = 5.0000 -4.0000 3.0000 -2.0000
4) >> A=[3.2 5.4 4.2 2.2;2.1 3.2 3.1 1.1;1.2 0.4 -0.8 -0.8;4.7 10.4 9.7 9.7];
>> B=[2.6 4.8 3.6 -8.4];
>> x=A^(-1)*B'
x =
5.0000 -4.0000 3.0000 -2.0000
5) Методом solve
>> syms x1 x2 x3 x4
>> [x1 x2 x3 x4]= solve('3.2*x1+5.4*x2+4.2*x3+2.2*x4=2.6', '2.1*x1+3.2*x2+3.1*x3+1.1*x4=4.8', '1.2*x1+0.4*x2-0.8*x3-0.8*x4=3.6','4.7*x1+10.4*x2+9.7*x3+9.7*x4=-8.4')
x1 = 5.0 x2 = -4.0 x3 = 3.0 x4 = -2.0
6) Метод эквивалентной модели
>> A=[3.2,5.4,4.2,2.2;2.1,3.2,3.1,1.1;1.2,0.4,-0.8,-0.8;4.7,10.4,9.7,9.7];
>> B=[2.6,4.8,3.6,-8.4];
>> [R, p]=chol(A)
R = 1.7889
p = 2
Вывод: р>0, следовательно A - отрицательно определенная матрица и не имеет решений путем построения эквивалентной модели.
Вторая система уравнений:
1) A=[3 -2 -5 1;2 -3 1 5;1 2 0 -4;1 -1 -4 9];
B=[3 -3 -3 22];
X=A\B
X = -1.0000 3.0000 -2.0000 2.0000
2) >> X=inv(A)*B
X =-1.0000 3.0000 -2.0000 2.0000
3) >> A=[3 2 1 1;-2 -3 2 -1;-5 1 0 -4;1 5 -4 9];
>> B=[3 -3 -3 22];
>> X=B/A
X = -1.0000 3.0000 -2.0000 2.0000
4) >> A=[3 -2 -5 1;2 -3 1 5;1 2 0 -4;1 -1 -4 9];
>> B=[3 -3 -3 22];
>> x=A^(-1)*B'
x = -1.0000 3.0000 -2.0000 2.0000
5) Методом solve
>> syms x1 x2 x3 x4
>> [x1 x2 x3 x4]=solve('3*x1-2*x2-5*x3+x4=3','2*x1-3*x2+x3+5*x4=-3','x1+2*x2+0*x3-4*x4=-3','x1-x2-4*x3+9*x4=22')
x1 = -1
x2 = 3
x3 = -2
x4 = 2
6) Метод эквивалентной модели
>> A=[3 -2 -5 1;2 -3 1 5;1 2 0 -4;1 -1 -4 9];
>> [R, p]=chol(A)
R = 1.7321
p = 2
Вывод: р>0, следовательно A - отрицательно определенная матрица и не имеет решений путем построения эквивалентной модели.
5. Вычислить значения интеграла методами трапеций и Симпсона.
Также найти первую и третью производные представленных функций
№ п/п | Подынтегральная функция f(x) | Интервал интегрирования [a;b] |
1 |
| [0.0; 1.2] |
2 |
| [2.0; 4.4] |
3 |
| Вычислить двойной интеграл |
4 |
| Вычислить неопределенный интеграл |
5.1
Метод трапеции:
>> x=0:0.012:1.2;
>> y=(1.5.*(x.^2)+x)./(x.^3+2);
>> I=trapz(x, y)
I = 0.5888
Метод Симпсона:
>> x=0:0.012:1.2;
>> quad('(1.5*x.^2+x)/(x.^3+2)',0,1.2)
ans =0.5888
Первая производная
>> syms x
>> f=(1.5*x.^2+x)/(x.^3+2);
>> diff(f, x)
ans = (3*x + 1)/(x^3 + 2) - (3*x^2*((3*x^2)/2 + x))/(x^3 + 2)^2
Третья производная
>> diff(f, x,3)
ans = (54*x^4*(3*x + 1))/(x^3 + 2)^3 - (27*x^2)/(x^3 + 2)^2 - (6*((3*x^2)/2 + x))/(x^3 + 2)^2 - (18*x*(3*x + 1))/(x^3 + 2)^2 + (108*x^3*((3*x^2)/2 + x))/(x^3 + 2)^3 - (162*x^6*((3*x^2)/2 + x))/(x^3 + 2)^4
5.2
Метод трапеции:
>> x=2:0.024:4.4;
>> y=(sin(-x.^3))./(x.^2+2.7);
>> I=trapz(x, y)
I = -3.9082e-04
Метод Симпсона:
>> x=2:0.024:4.4;
>> quad('(sin(-x.^3))./(x.^2+2.7)',2,4.4)
ans = -4.9565e-04
Первая производная
>> syms x
>> y=(sin(-x.^3))./(x.^2+2.7);
>> diff(y, x)
ans = (2*x*sin(x^3))/(x^2 + 27/10)^2 - (3*x^2*cos(x^3))/(x^2 + 27/10)
Третья производная
>> diff(y, x,3)
ans = (54*x^2*cos(x^3))/(x^2 + 27/10)^2 - (6*cos(x^3))/(x^2 + 27/10) - (72*x^4*cos(x^3))/(x^2 + 27/10)^3 + (27*x^6*cos(x^3))/(x^2 + 27/10) + (54*x^3*sin(x^3))/(x^2 + 27/10) + (48*x^3*sin(x^3))/(x^2 + 27/10)^4 - (54*x^5*sin(x^3))/(x^2 + 27/10)^2 - (24*x*sin(x^3))/(x^2 + 27/10)^3
5.3
>> syms x y
>> z = (1 + (2*y./x) + (cos(x))^2);
>> I=int(int(z, x,1,3),y,1,2)
I =
log(27) - sin(2)/4 + sin(6)/4 + 3
Нахождение первой производной
>> syms x y
>> z = (1 + (2*y./x) + (cos(x))^2);
>> diff(z)
ans = - 2*cos(x)*sin(x) - (2*y)/x^2
Нахождение третьей производной
>> diff(z,3)
ans = 8*cos(x)*sin(x) - (12*y)/x^4
5.4>> syms x
>> y=2*x.^3+1;
>> I=int(y)
I = (x*(x^3 + 2))/2
Нахождение первой производной
>> syms x
>> y=2*x.^3+1;
>> diff(y, x)
ans = 6*x^2
Нахождение третьей производной
>> diff(y, x,3) ans = 12
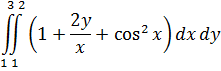
6. Решить нелинейное уравнение графическим способом, с помощью функции fzero (fsolve)
Первое уравнение:
Графический способ:
>> x=1:0.004:1.4;
>> y=x.^5-x-2;
>> comet(x, y)
С помощью функции fsolve:
>> x=1:0.004:1.4;
>> z=fsolve('x.^5-x - 2',1)
z = 1.2672
C помощью функции fzero:
>> [x]=fzero('x.^5-x-2',[1:1.4])
x = 1.2672
Вторая функция
Графический способ:
>> x=3:0.01:4;
>> y=x-2-x.^(1/4);
>> plot(x, y)

С помощью функции fsolve:
>> z=fsolve('x-2-x.^(1/4)',3)
z = 3.3532
C помощью функции fzero:
>> [x]=fzero('x-2-x.^(1/4)',[3:4])
x = 3.3532
7. Найти координаты минимального и максимального значений функции f(x) на [a;b]:
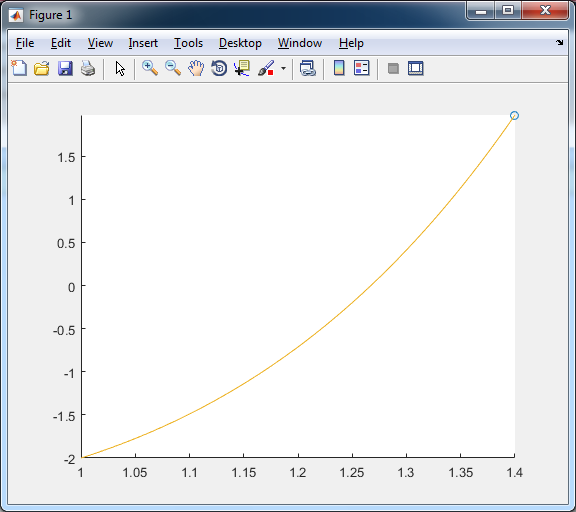
Первая функция
>> syms x
>> y = @(x) exp(-1*x.^2)./x;
>> [xmin, ymin] = fminbnd(y,-2,-1)
xmin = -1.0001
ymin = -0.3678
>> xmax = fminbnd(@(x)-y(x),-2,-1)
xmax = -2.0000
>> ymax = y(xmax)
ymax = -0.0092
>> fplot(y,[-2 -1],'g'), hold on
>> plot(xmin, ymin,'ob',... % точка минимума
[-2 -1],[ymin ymin],'--c',... % линия уровня минимума
xmax, ymax,'or',... % точка максимума
[-2 -1],[ymax ymax],'--m','linew',2) % линия уровня максимума
>> grid on
Координаты точки min=[-1.0001; -0.3678]
Координаты точки max=[-2.0000; -0.0092]
Вторая функция:
>> syms x
>> y = @(x) -(abs(x)).^3*exp((-x.^2)/2);
>> [xmin, ymin] = fminbnd(y,-2,-1)
xmin = -1.7320
ymin = -1.1594
>> xmax = fminbnd(@(x)-y(x),-2,-1)
xmax = -1.0001
>> ymax = y(xmax)
ymax = -0.6066
>> fplot(y,[-2 -1],'g'), hold on
>> plot(xmin, ymin,'ob',... % точка минимума
[-2 -1],[ymin ymin],'--c',... % линия уровня минимума
xmax, ymax,'or',... % точка максимума
[-2 -1],[ymax ymax],'--m','linew',2) % линия уровня максимума
Координаты точки min=[-1.7320; -1.1594]
Координаты точки max=[-1.0001; -0.6066]

8.Построить и оформить:
- цветные поверхности функций: ![]()
![]() на отрезке [-2;3] с шагом 0,2;
на отрезке [-2;3] с шагом 0,2;
-
 на отрезке [-5;5] с шагом 0,2.
на отрезке [-5;5] с шагом 0,2.
Первая функция:
>> [x, y]=meshgrid(-2:0.2:3);
>> z=exp(x).*(cos(y+1)).^2;
surf(x, z,y)

Вторая функция:
>> [x, y]=meshgrid(-5:0.2:5,-5:0.2:5);
>> k=(sin(-x.^3))./(y.^2+2.7);
>> surf(x, k,y)

9.Провести вычисления по заданной формуле при заданных значениях параметров, представив последовательность действий:
а)
>> p=log(3);
>> q=log10(3);
>> 3*(p^(-2/3)+q^(-1/2))*(p*q)^(1/3)
ans = 5.7737
б)
>> p=0.013;
>> q=1.4*10^2;
>> 3*(p^(-2/3)+q^(-1/2))*(p*q)^(1/3)
ans = 66.5591
10.Решить уравнения графически, с помощь функции solve и с помощью функции roots:
1 |
|
2 |
|
Решение первого уравнения :
Графический способ:
>> p=[1.5,2,-1,-1,-1];
>> x=-1:.01:1;
>> f=polyval(p, x);
>> plot(x, f)
>> grid
С помощью функции solve:
>> [x]=solve('1.5*x^4+2*x^3-x^2-x-1=0')
Warning: Do not specify equations and variables as character strings. Instead, create symbolic variables with syms.
> In solve>getEqns (line 445)
In solve (line 225)
x =
-1.6425445975128565684872329577096
0.93882394030787628277359310965355
- 0.31480633806417652380984674263865 - 0.57725128651806438087527819963937i
- 0.31480633806417652380984674263865 + 0.57725128651806438087527819963937i
C помощью функции roots:
>> S=[1.5 2 -1 -1 -1];
>> roots(S)
ans =
-1.6425 + 0.0000i
0.9388 + 0.0000i
-0.3148 + 0.5773i
-0.3148 - 0.5773i
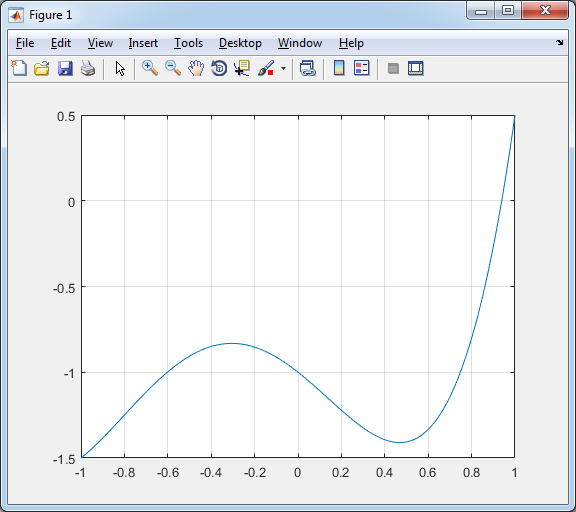
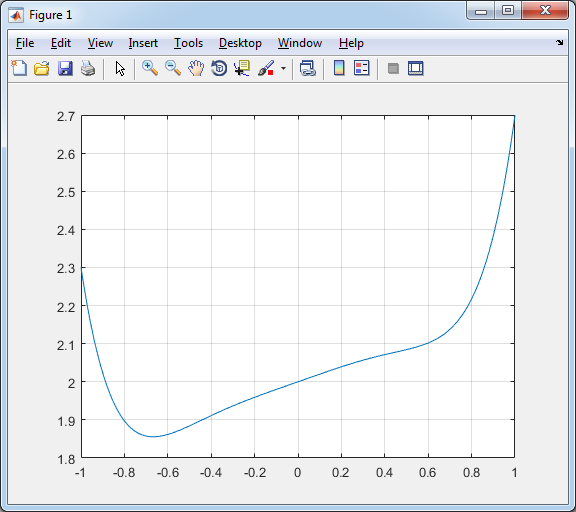
Решение второго уравнения:
Графический способ:
>> p=[1,0,-0.5,0,0,1/5,2];
>> x=-1:.01:1;
>> f=polyval(p, x);
>> plot(x, f)
>> grid
С помощью функции solve:
>> [x]=solve('x^6-(x^4/2)+x/5=2')
x =
root(z^6 - z^4/2 + z/5 - 2, z, 1)
root(z^6 - z^4/2 + z/5 - 2, z, 2)
root(z^6 - z^4/2 + z/5 - 2, z, 3)
root(z^6 - z^4/2 + z/5 - 2, z, 4)
root(z^6 - z^4/2 + z/5 - 2, z, 5)
root(z^6 - z^4/2 + z/5 - 2, z, 6)
>> vpa(x)
ans =
-1.2243455222807260843718106489982
1.1831564024980747853293628273855
- 0.58142545360786813094463758321218 + 0.92652200925624496465980914830156i
- 0.58142545360786813094463758321218 - 0.92652200925624496465980914830156i
0.60202001349919378046586149401854 + 0.88965225592417880254345935070269i
0.60202001349919378046586149401854 - 0.88965225592417880254345935070269i
C помощью функции roots:
>> p=[1 0 -0.5 0 0 1/5 -2];
>> roots(p)
ans= -1.2243 + 0.0000i 1.1832 + 0.0000i 0.5814 + 0.9265i
-0.5814 - 0.9265i 0.6020 + 0.8897i 0.6020 - 0.8897i
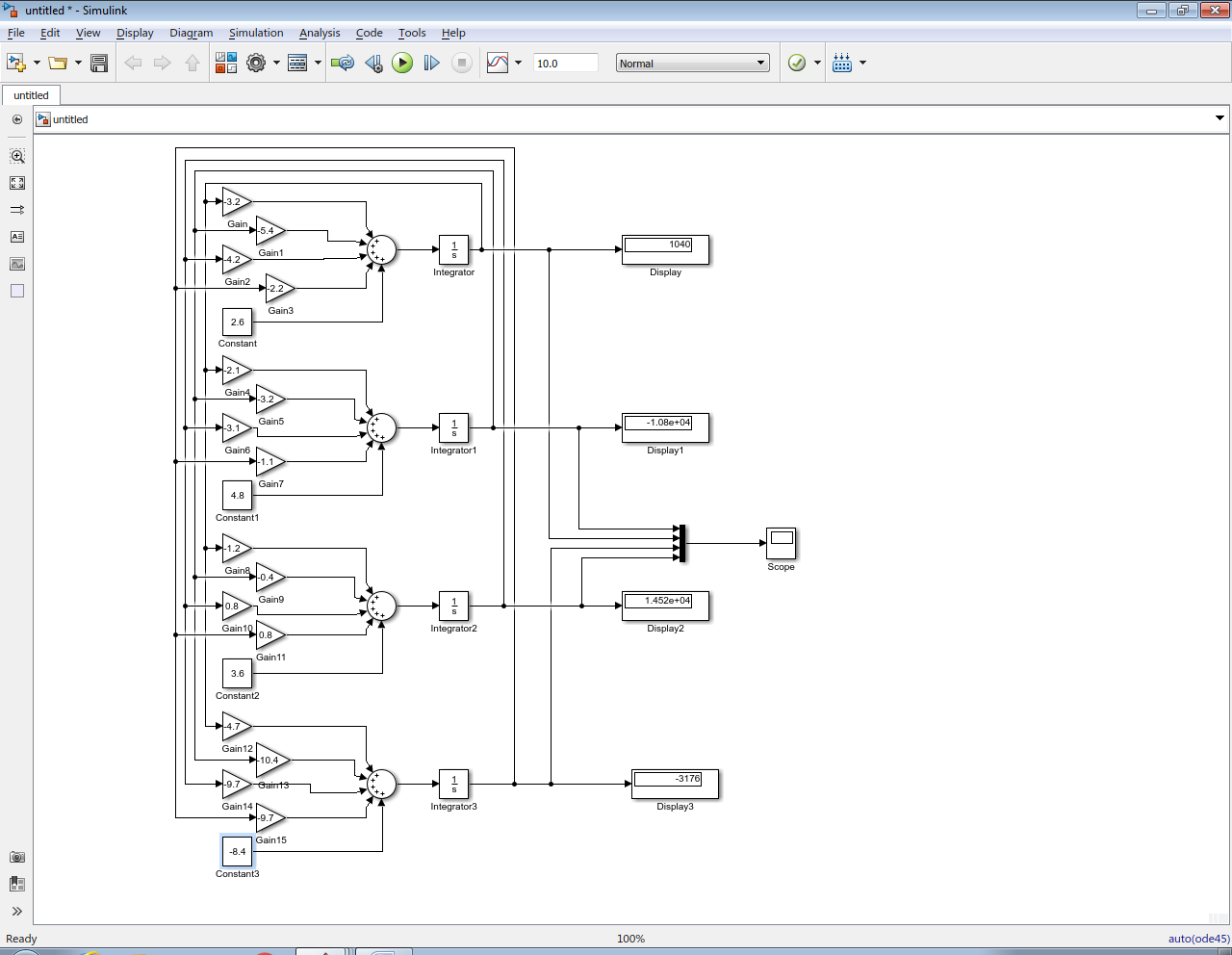
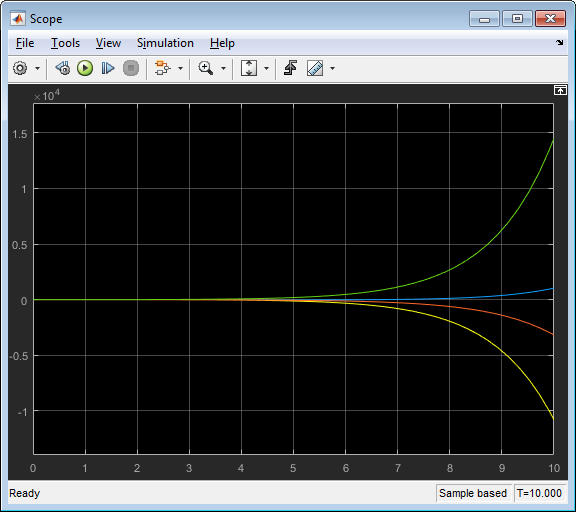
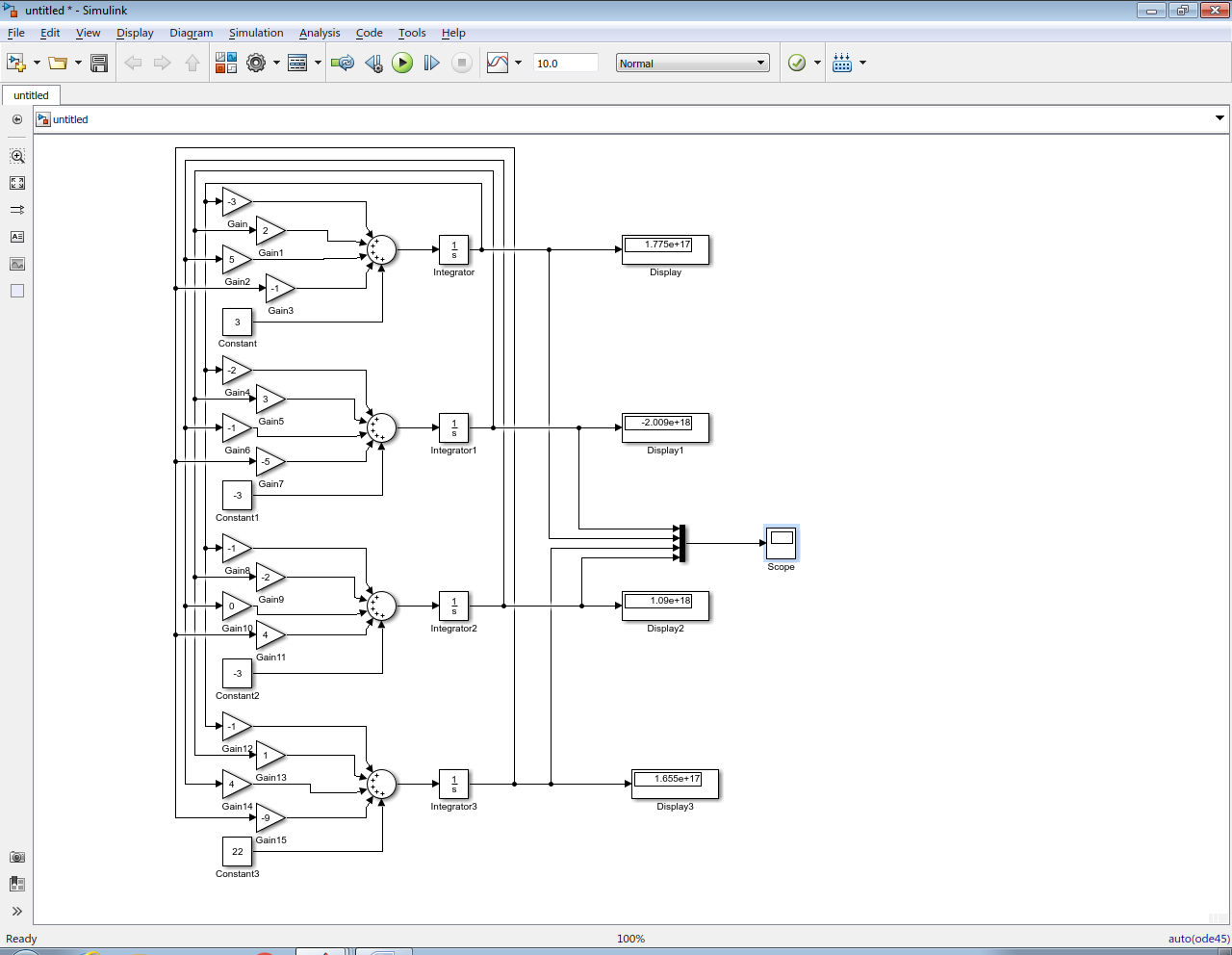
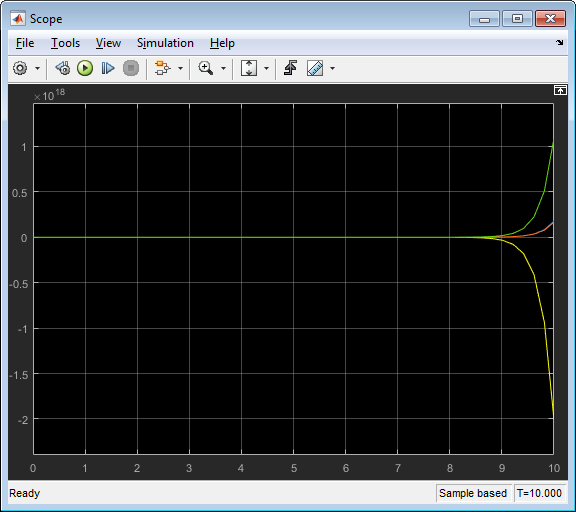
11. Создать аналогичную модель объекта в среде SIMULINK, провести моделирование. Результаты представить в отчете.

Заключение
Выполняя данную работу мною были получены навыки обработки цифровых сигналов, обработки данных и их моделирование в MatLab.
Список использованных источников
, , Цифровая обработка сигналов в MatLab: учеб. пособие.- СПб: БХВ-Петербург, 2013.-512с.:-ил.-(Учебная литература для вузов)
Методы и алгоритмы анализа данных и их моделирование в MatLab: учеб. пособие.- СПб: БХВ-Петербург, 2016.-384с.: ил.-(Учебное пособие)
https://matlab.ru
Основы программирования в MatLab: учеб. пособие.- СПб: БХВ-Петербург, 2016.-208с.-( Учебное пособие)
Цифровая обработка сигналов (второе издание). СПб, Питер, 2006. - 751 с.: ил. Аннотация.
MatLab 6.5 SP1/7 + Simulink 5/6. Основы применения. М.: Солон-Пресс, 2005.-800с. Аннотация.
Matlab 6.5 SP1/7 + Simulink 5/6 в математике и моделировании. М.: Солон-Пресс, 2005.-576с. Аннотация.
