

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
СОДЕРЖАНИЕ.
ВВЕДЕНИЕ…………………………………………………..стр.6

Задание №1…………………………………………………...стр.8
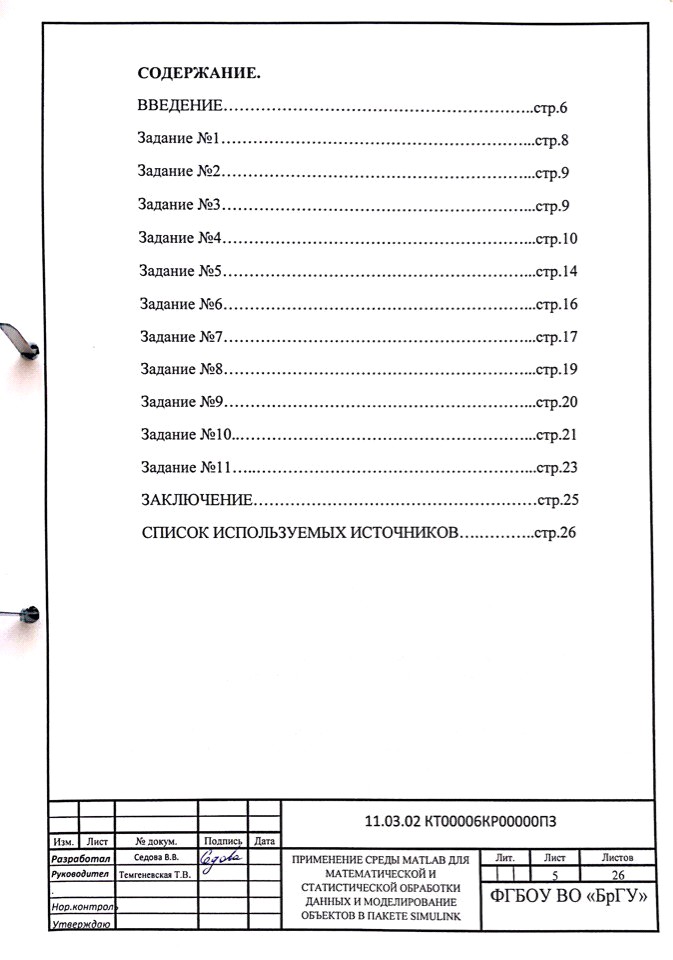
Задание №2…………………………………………………...стр.9ВВЕДЕНИЕ.
MATLAB — это высокоуровневый язык и интерактивная среда для программирования, численных расчетов и визуализации результатов. С помощью MATLAB можно анализировать данные, разрабатывать алгоритмы, создавать модели и приложения.
Язык, инструментарий и встроенные математические функции позволяют исследовать различные подходы и получать решение быстрее, чем с использованием электронных таблиц или традиционных языков программирования.
MATLAB широко используется в таких областях, как:
- обработка сигналов и связь, обработка изображений и видео, системы управления, автоматизация тестирования и измерений, финансовый инжиниринг, вычислительная биология и т. п.
Более миллиона инженеров и ученых по всем миру используют MATLAB в качестве языка технических вычислений.
MATLAB представляет собой основу всего семейства продуктов MathWorks и является главным инструментом для решения широкого спектра научных и прикладных задач, в таких областях как: моделирование объектов и разработка систем управления, проектирование коммуникационных систем, обработка сигналов и изображений, измерение сигналов и тестирование, финансовое моделирование, вычислительная биология и др.
Ядро MATLAB позволяет максимально просто работать с матрицами реальных, комплексных и аналитических типов данных и со структурами данных и таблицами поиска.
Simulink – это графическая среда имитационного моделирования, позволяющая при помощи блок-диаграмм в виде направленных графов, строить динамические модели, включая дискретные, непрерывные и гибридные, нелинейные и разрывные системы.
Интерактивная среда Simulink, позволяет использовать уже готовые библиотеки блоков для моделирования электросиловых, механических и гидравлических систем, а также применять развитый модельно-ориентированный подход при разработке систем управления, средств цифровой связи и устройств реального времени.
Дополнительные пакеты расширения Simulink позволяют решать весь спектр задач от разработки концепции модели до тестирования, проверки, генерации кода и аппаратной реализации.
Simulink интегрирован в среду MATLAB, что позволят использовать встроенные математические алгоритмы, мощные средства обработки данных и научную графику.
Целью работы является закрепление практических навыков обработки информации с применением пакета MATLAB.
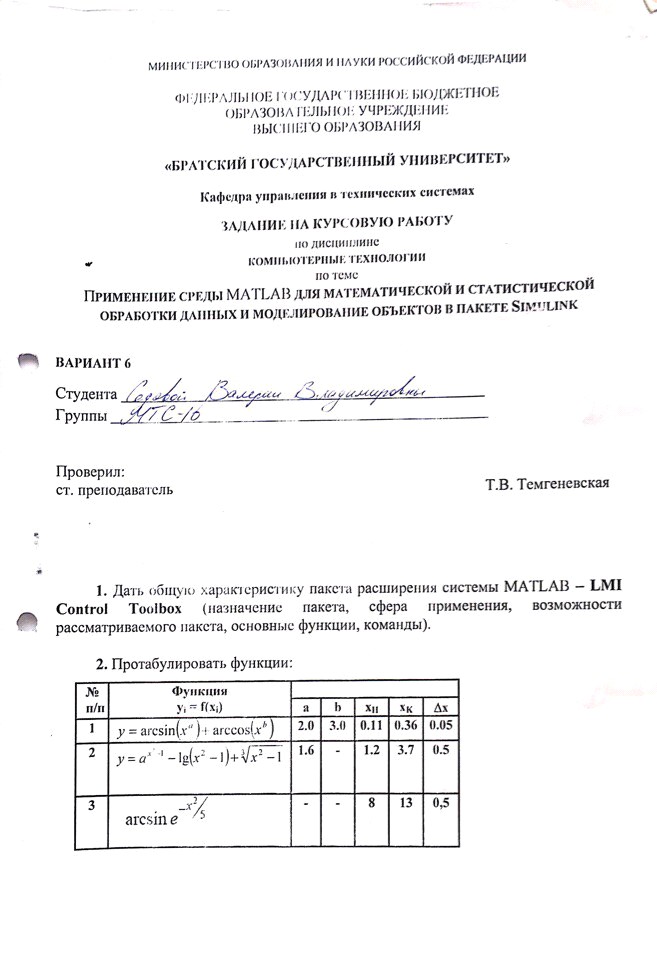
Задание №1. Дать общую характеристику пакета расширения системы MATLAB – LMI Control Toolbox.
Пакет LMI (Linear Matrix Inequality) Control обеспечивает интегрированную среду для постановки и решения задач линейного программирования. Предназначенный первоначально для проектирования систем управления пакет позволяет решать любые задачи линейного программирования практически в любой сфере деятельности, где такие задачи возникают. Основные возможности пакета:
- исследование задач линейного программирования; графический редактор задач линейного программирования; задание ограничений в символьном виде; многокритериальное проектирование регуляторов; проверка устойчивости: квадратичная устойчивость линейных систем, устойчивость по Ляпунову, проверка критерия Попова для нелинейных систем.
Пакет LMI Control включает два вида графического интерфейса пользователя: редактор задачи линейного программирования (LMI Editor) и интерфейс Magshape. LMI Editor позволяет задавать ограничения в символьном виде, a Magshape обеспечивает пользователя удобными средствами работы с пакетом.
При создании пакета его авторы обеспечивали достижение двух целей: формирование комплекса инструментов на базе LMI для анализа и синтеза оптимальных и робастных систем управления, а также построение гибкой и удобной для пользователей интегрированной среды, позволяющей ставить задачи в терминах LMI и эффективно решать соответствующие системы матричных неравенств.
Как и в других пакетах группы, особое внимание уделяется объектам управления с неопределенностями в математическом описании. Пакет содержит широкий набор функций для моделирования и анализа систем с неопределенностями различного типа на базе теории LMI. Предлагаются различные подходы к синтезу оптимальных и робастных регуляторов. приводятся содержательные примеры, хорошо иллюстрирующие возможности пакета.
Особое значение имеет специальная форма задания неопределенностей, которые связаны с математическими моделями систем и играют центральную роль в функциональной ориентации пакета LMI-Tools.
Задание №2. Протабулировать функции.
Функция №1)>> a=2.0;
>> b=3.0;
>> x=0.11:0.05:0.36;
>> y=asin(x.^a)+acos(x.^b)
y = 1.5816 1.5923 1.6056 1.6209 1.6372 1.6541
Функция №2)>> a=1.6;
>> x=1.2:0.5:3.7;
>> y=a.^((x.^2)-1)-log10(x.^2-1)+(x.^2-1).^(1/3)
y = 2.3469 3.3909 7.0605 20.2744 78.0579 390.5274
Функция №3)>> x=8:0.5:13;
>> y=asin(exp((-x.^2)./5))
y = 1.0e-05 *
0.2761 0.0530 0.0092 0.0014 0.0002 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
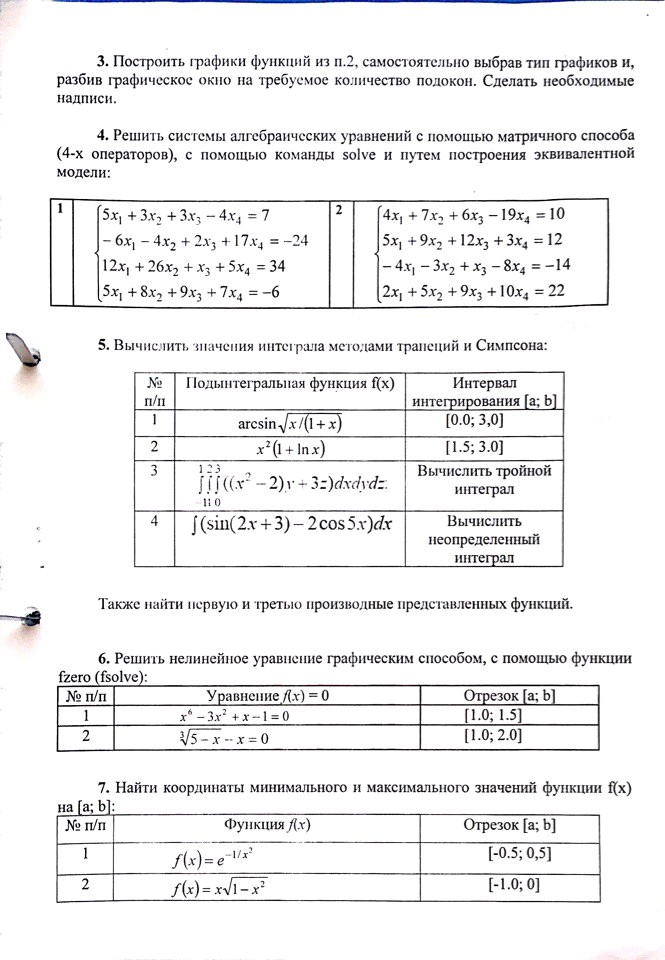
Задание №3. Построить графики функций из Задания №2., самостоятельно выбрав тип графиков и, разбив графическое окно на требуемое количество подокон. Сделать необходимые надписи.
>> a=2.0;
>> b=3.0;
>> x=0.11:0.05:0.36;
>> y=asin(x.^a)+acos(x.^b);
>> plot(x, y)
>> subplot(3,1,2)
>> a=1.6;
>> x=1.2:0.5:3.7;
>> y=a.^((x.^2)-1)-log10(x.^2-1)+(x.^2-1).^(1/3)
y = 2.3469 3.3909 7.0605 20.2744 78.0579 390.5274
>> plot(x, y)
>> subplot(3,1,3)
>> x=8:0.5:13;
>> y=asin(exp((-x.^2)./5));
>> plot(x, y)
>> ylabel('y')
>> xlabel('x')
>> subplot(3,1,2)
>> ylabel('y')
>> xlabel('x')
>> subplot(3,1,1)
>> ylabel('y')
>> xlabel('x')
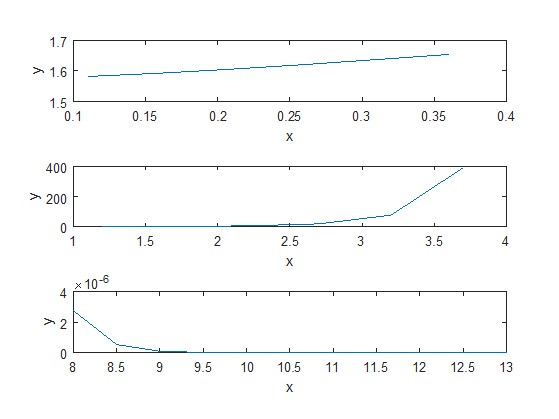
Рисунок 1. Графики уравнений.
Задание №4. Решить системы алгебраических уравнений с помощью матричного способа (4-х операторов), с помощью команды solve и путем построения эквивалентной модели.
Решение системы №1)
1 способ)>> A=[5,-6,12,5;3,-4,26,8;3,2,1,9;-4,17,5,7];
>> B=[7,-24,34,-6];
>> x=B/A
x = 1.9618 0.5469 -1.9629 -0.3598
2 способ)>> A=[5,3,3,-4;-6,-4,2,17;12,26,1,5;5,8,9,7];
>> B=[7;-24;34;-6];
>> x=A\B
x =
1.9618
0.5469
-1.9629
-0.3598
3 способ)>> syms x1 x2 x3 x4
>> [x1,x2,x3,x4]=solve('5*x1+3*x2+3*x3-4*x4=7', '-6*x1-4*x2+2*x3+ 17*x4 = -24', '12*x1+26*x2+x3+5*x4 = 34', '5*x1+8*x2+9*x3+7*x4 = -6');
> vpa(x1,5)
ans =1.9618
>> vpa(x2,5)
ans = 0.54694
>> vpa(x3,5)
ans =-1.9629
>> vpa(x4,5)
ans =-0.35975
4 способ)
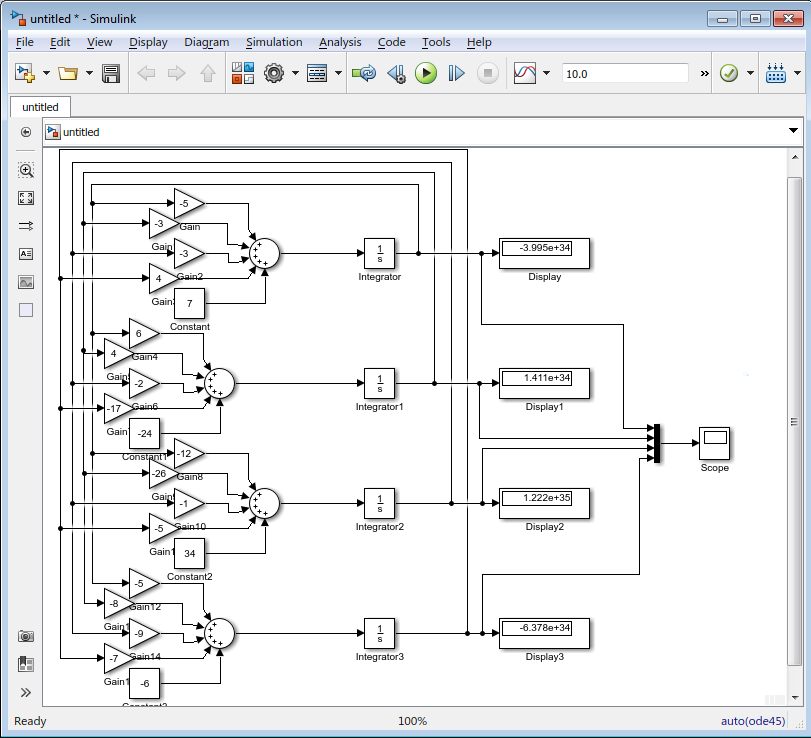
Рисунок 2. Построение эквивалентной модели
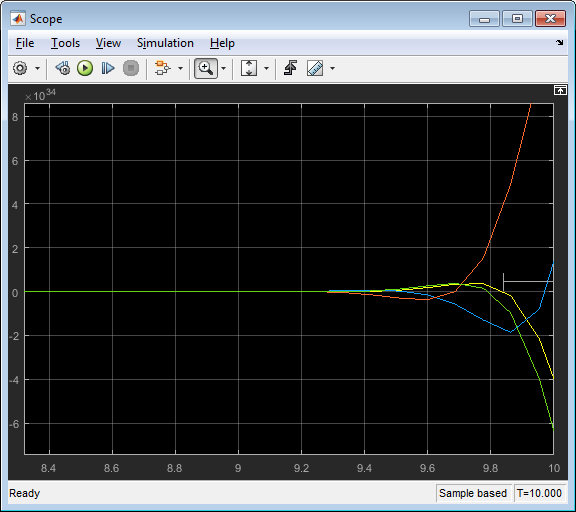
Рисунок 3. Результат построения эквивалентной модели
>> M=[5,3,3,-4;-6,-4,2,17;12,26,1,5;5,8,9,7]
M =
5 3 3 -4
-6 -4 2 17
12 26 1 5
5 8 9 7
>> [R, p]=chol(M)
R =
2.2361
p =
2
Решение системы №2)
1 способ)>> A=[4,7,6,-19;5,9,12,3;-4,-3,1,-8;2,5,9,10];
>> B=[10;12;-14;22];
>> x=A\B
x =
-51.9692
58.3487
-21.8872
3.1179
2 способ)>> A=[4,5,-4,2;7,9,-3,5;6,12,1,9;-19,3,-8,10];
>> B=[10,12,-14,22];
>> x=B/A
x = -51.9692 58.3487 -21.8872 3.1179
3 способ)>> syms x1 x2 x3 x4
>>[x1,x2,x3,x4]=solve('4*x1+7*x2+6*x319*x4=10','5*x1+9*x2+12*x3+3*x4=12','-4*x1-3*x2+x3-8*x4=14','2*x1+5*x2+9*x3+10*x4=22');
>> vpa(x1,5)
ans =-51.969
>> vpa(x2,5)
ans =58.349
>> vpa(x3,5)
ans =-21.887
>> vpa(x4,5)
ans =3.1179
4 способ)
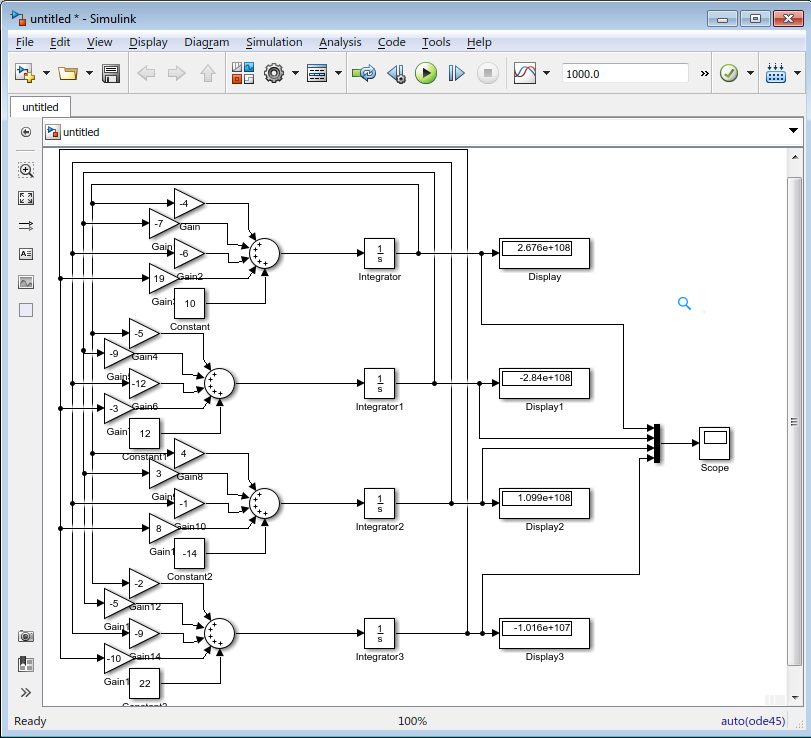
Рисунок 4. Построение эквивалентной модели
Рисунок 5. Результат построения эквивалентной модели
>> M=[4,7,6,-19;5,9,12,3;-4,-3,1,-8;2,5,9,10]
M =
4 7 6 -19
5 9 12 3
-4 -3 1 -8
2 5 9 10
>> [R, p]=chol(M)
R =
2
p =
2
Задание №5. Вычислить значения интеграла методами трапеции и Симпсона. Так же найти первую и третью производные представленных функций.
Вычисление интеграла №1)
>> x=0.0:0.1:3.0;
>> y=asin(sqrt(x./(1+x)));
>> trapz(x, y)
ans = 2.4503
>> quad('asin(sqrt(x./(1+x)))',0.0,3.0)
ans = 2.4567
Вычисление интеграла №2)
>> x=[1.5:0.1:3.0];
>> y=x.^2.*(1+log(x));
>> trapz(x, y)
ans = 14.6896
>> quad('x.^2.*(1+log(x))',1.5,3.0)
ans = 14.6814
Вычисление интеграла №3)
>> x=0:0.1:3;
>> y=1:0.1:2;
>> z=-1:0.1:2;
>> int(int(int('((x.^2 - 2).*y + 3.*z)',x),y),z)
Undefined function 'int' for input arguments of type 'char'.
>> char(char(char('((x.^2 - 2).*y + 3.*z)',x),y),z)
ans = 4Ч31 char array
'((x.^2 - 2).*y + 3.*z) '
Вычисление интеграла №4)
>> syms x
>> int('sin(2*x+3)-2*cos(5*x)',x)
ans = - (2*sin(5*x))/5 - cos(2*x + 3)/2
Нахождение первой и третьей производных:
1)>> syms x
>> y=asin(sqrt(x./(1+x)));
>> diff(y)
ans = -(x/(x + 1)^2 - 1/(x + 1))/(2*(x/(x + 1))^(1/2)*(1 - x/(x + 1))^(1/2))
>> diff(y,3)
ans = (x/(x + 1)^2 - 1/(x + 1))^3/(4*(x/(x + 1))^(3/2)*(1 - x/(x + 1))^(3/2)) - (3*(x/(x + 1)^2 - 1/(x + 1))^3)/(8*(x/(x + 1))^(1/2)*(1 - x/(x + 1))^(5/2)) - ((6*x)/(x + 1)^4 - 6/(x + 1)^3)/(2*(x/(x + 1))^(1/2)*(1 - x/(x + 1))^(1/2)) - (3*(x/(x + 1)^2 - 1/(x + 1))^3)/(8*(x/(x + 1))^(5/2)*(1 - x/(x + 1))^(1/2)) - (3*(x/(x + 1)^2 - 1/(x + 1))*((2*x)/(x + 1)^3 - 2/(x + 1)^2))/(4*(x/(x + 1))^(1/2)*(1 - x/(x + 1))^(3/2)) + (3*(x/(x + 1)^2 - 1/(x + 1))*((2*x)/(x + 1)^3 - 2/(x + 1)^2))/(4*(x/(x + 1))^(3/2)*(1 - x/(x + 1))^(1/2))
2) >> y=x.^2.*(1+log(x));
>> diff(y)
ans = x + 2*x*(log(x) + 1)
>> diff(y,3)
ans = 2/x
3)> syms x y z
>> y=((x.^2 - 2).*y + 3.*z);
>> diff(y)
ans = 2*x*y
>> diff(y,3)
ans =0
4)>> y=sin(2*x+3)-2*cos(5*x);
>> diff(y)
ans =10*sin(5*x) + 2*cos(2*x + 3)
>> diff(y,3)
ans = - 250*sin(5*x) - 8*cos(2*x + 3)
Задание №6. Решить нелинейное уравнение графическим способом, с помощью функции fzero(fsolve).
Уравнение №1)>> x=[1:0.1:1.5];
>> y=x.^6-3*x.^2+x-1;
>> y=x.^6-3.*x.^2+x-1;
>> [x, y]=fzero('x.^6-3.*x.^2+x-1',[1;1.5])
x =
1.2963
y =
4.4409e-16
>> x=[1:0.1:1.5];
>> y=x.^6-3.*x.^2+x-1;
>> plot(x, y)
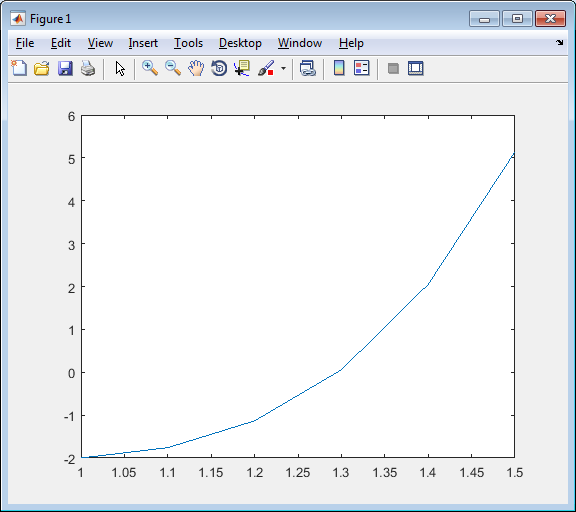
Рисунок 6. График уравнения x^6-3x^2+x-1=0
Уравнение №2)>> x=[1:0.1:2];
>> y=(5-x).^(1/3)-x;
>> [x, y]=fzero('(5-x).^(1/3)-x',[1;2])
x =
1.5160
y =
0
>> x=[1:0.1:2];
>> y=(5-x).^(1/3)-x;
>> plot(x, y)
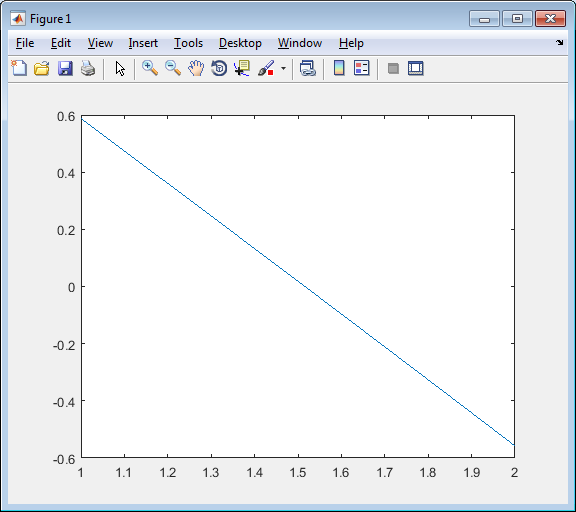
Рисунок 7. График уравнения (5-х)^(1/3)-x=0
Задание №7. Найти координаты минимального и максимального значений функции f(x) на [a;b].
Функция №1)>> x=[-0.5:0.1:0.5];
>> y=exp(-1./x.^2)
y =
0.0183 0.0019 0.0000 0.0000 0.0000 0 0.0000 0.0000 0.0000 0.0019 0.0183
>> plot(x, y)
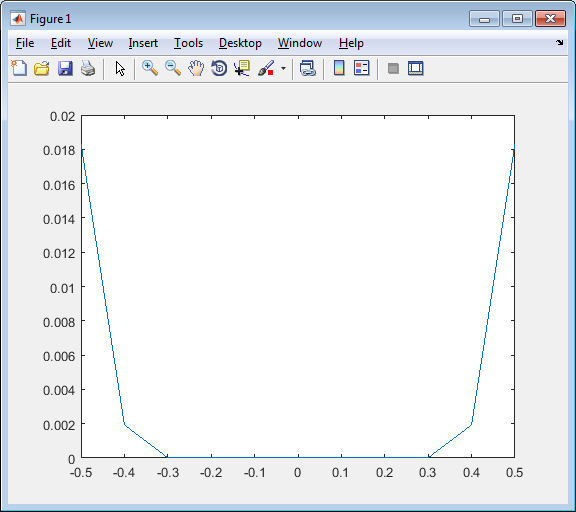
Рисунок 8. Функция №1
>> [X, Y]=fminbnd('exp(-1./x.^2)',-0.5,0.5)
X =
0.0280
Y =
0
>> [X, Y]=fminbnd('-exp(-1./x.^2)',-0.5,0.5)
X =
-0.4999
Y =
-0.0183
Функция №2)>> x=[-1.0:0.1:0];
>> y=x.*sqrt(1-x.^2)
y =
0 -0.3923 -0.4800 -0.4999 -0.4800 -0.4330 -0.3666 -0.2862 -0.1960 -0.0995 0
>> plot(x, y)
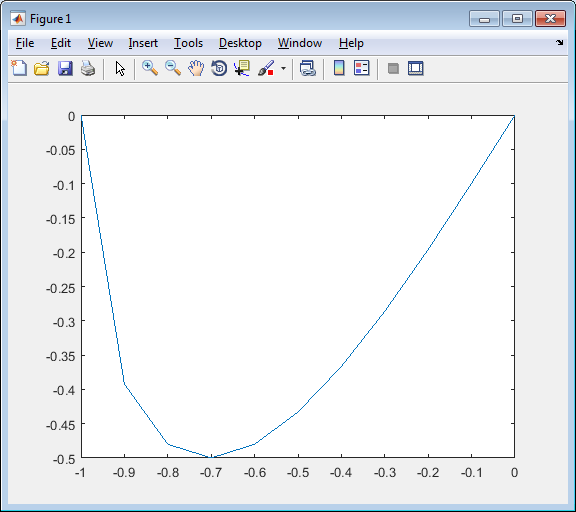
Рисунок 9. Функция №2
>> x=[-1:0.1:0];
>> y=x.*sqrt(1-x.^2);
>> [X, Y]=fminbnd('x.*sqrt(1-x.^2)',-1,0)
X =
-0.7071
Y =
-0.5000
>> [X, Y]=fminbnd('-x.*sqrt(1-x.^2)',-1,0)
X =
0
Y =
-0.01
Задание №8. Построить и оформить:
- графики плоских кривых: дельтоида x=2cost+cos2t, y=2sint – sin2t
- цветные поверхности функции: ![]()
![]() на отрезке
на отрезке
[-3;3] с шагом 0,1.
График №1) >> syms x y t
>> x=2.*cos(t)+cos(2.*t);
>> y=2.*sin(t)-sin(2.*t);
>> ezplot(x, y)
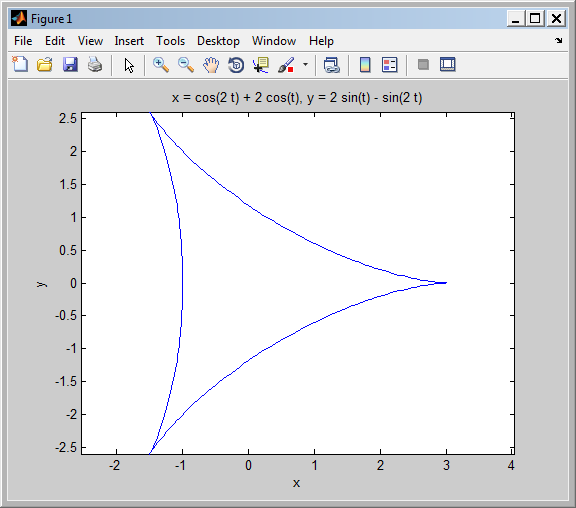
Рисунок 10. Дельтоид
График №2) >> [x, y]=meshgrid(-3:0.1:3);
>> z=(sin(x)./(x.^2+y.^2-0.3))+sin(pi.*y);
>> plot3(x, y,z)
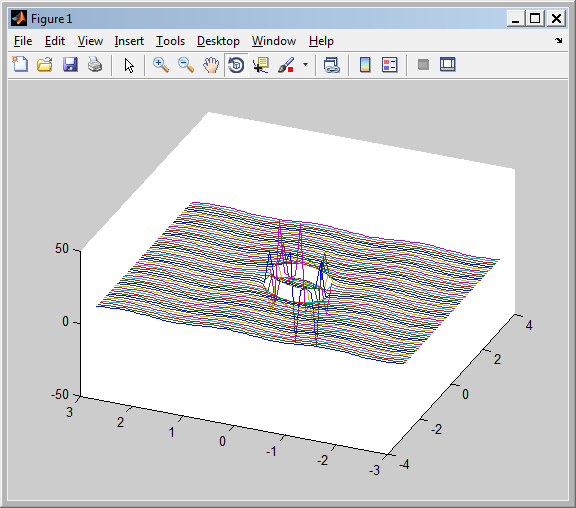
Рисунок 11. Цветные поверхности
Задание №9. Провести вычисления по заданной формуле при заданных значениях параметров, представив последовательность действий.
А)>> n=3.1516*10^(-2);
>> a=(5*pi)/180;
>> y=sqrt(n^3/(16.3*sin(a)*sin(2*a)))
y = 0.0113
Б)>> n=exp(3.5);
>> a=(2*pi)/13;
>> y=sqrt(n^3/(16.3*sin(a)*sin(2*a)))
y = 76.3237
Задание №10. Решить уравнения графически, с помощью функций solve и с помощью функции roots.
Решение уравнения №1:
1 способ)>> syms x
>> [x]=solve('x^8-2*x^3-x-1=0');
>> vpa(x,5)
ans =
0.5 - 0.86603i
0.5 + 0.86603i
-0.58527
1.2569
- 0.96957 + 0.69222i
- 0.96957 - 0.69222i
0.13377 + 0.96951i
0.13377 - 0.96951i
2 способ) >> A=[1,0,0,0,0,-2,0,-1,-1];
>> x=roots(A)
x =
0.0000 + 0.0000i
1.2569 + 0.0000i
0.5000 + 0.8660i
0.5000 - 0.8660i
0.1338 + 0.9695i
0.1338 - 0.9695i
-0.9696 + 0.6922i
-0.9696 - 0.6922i
-0.5853 + 0.0000i
3 способ) >> syms x y
>> y=x.^8-2.*x.^3-x-1
y =
x^8 - 2*x^3 - x - 1
>> ezplot(y)
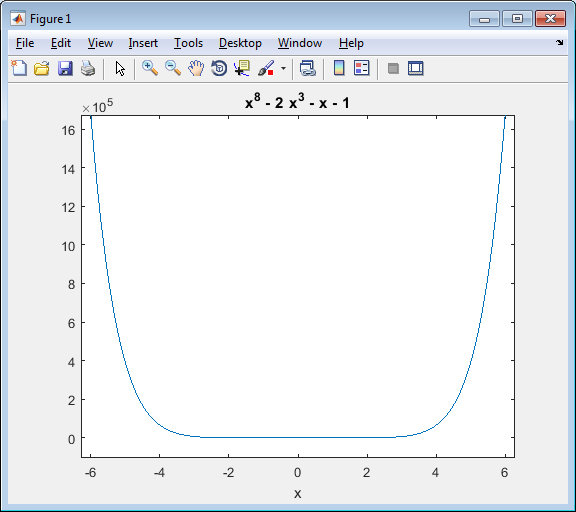
Рисунок 12. График уравнения y=x^8-2*x^3-x-1
Решение уравнения №2:
1 способ)>> syms x
>> [x]=solve('x^3-x^2+1=-2-x^3');
>> vpa(x,5)
ans =
-1.0
0.75 - 0.96825i
0.75 + 0.96825i
2 способ)>> A=[2,-1,0,3];
>> x=roots(A)
x =
0.7500 + 0.9682i
0.7500 - 0.9682i
-1.0000 + 0.0000i
3 способ) >> syms x y
>> y=2.*x.^3-x.^2+3
y =
2*x^3 - x^2 + 3
>> ezplot(y)
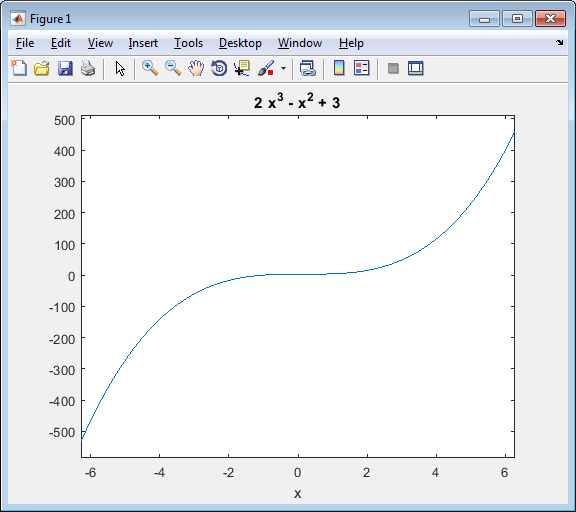
Рисунок 13. График уравнения y=2*x^3-x^2+3
Задание №11. Создать аналогичную модель объекта в среде SIMULINK, провести моделирование. Результаты представить в отчете.
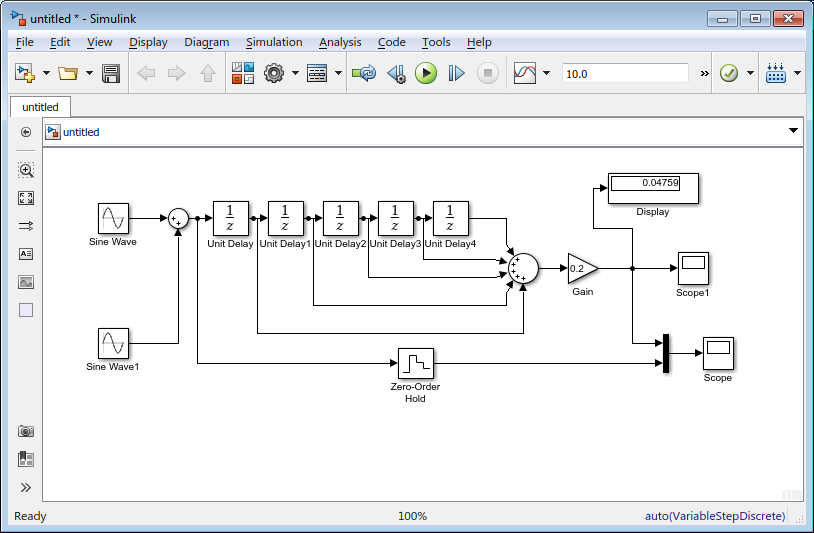
Рисунок 14. Модель объекта
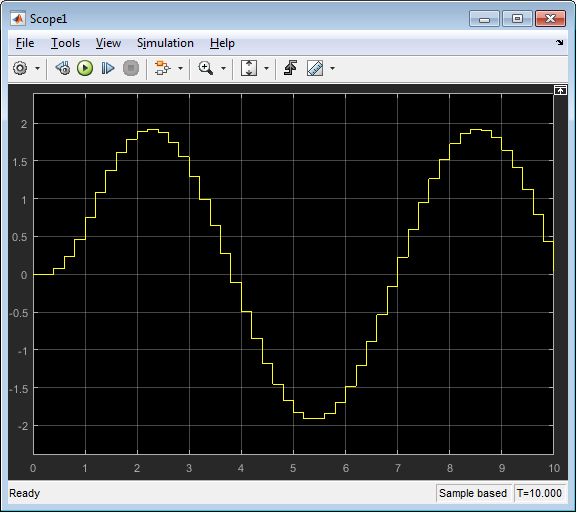
Рисунок 15. Результаты scope1
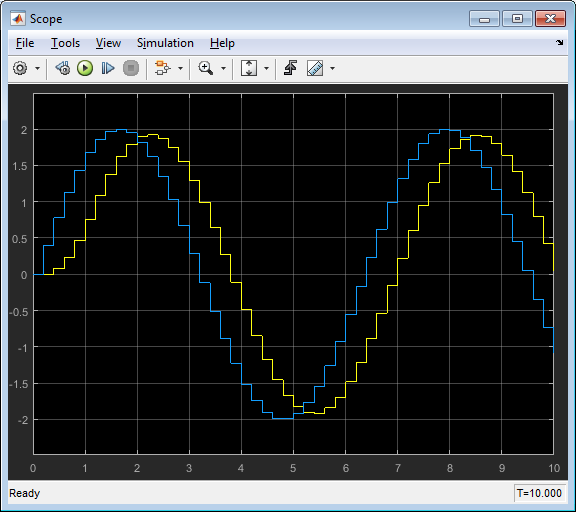
Рисунок 16. Результаты scope
ЗАКЛЮЧЕНИЕ.
Во время выполнения работы мы закрепили практические навыки обработки информации с применением пакета MATLAB.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.
https://matlab. ru/ https://www. / https://matlab. ru/products/Simulink https://matlab. ru/products/matlab http://matlab. exponenta. ru/lmicontrol/index. php http://samoychiteli. ru/document21792.html