


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
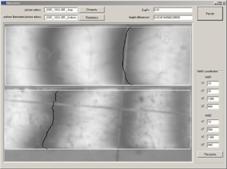 Рис.1. Окно программы PKoesters.
Рис.1. Окно программы PKoesters.
Для достижения поставленной цели необходимо решить три задачи. Во-первых, требуется подключить с помощью видеокамеры интерферометр к компьютеру. Во-вторых, найти наиболее эффективный алгоритм обработки интерференционных картин в белом свете. И наконец, реализовать этот алгоритм в виде компьютерной программы.
При подключении видеокамеры следует согласовывать такие факторы как размер используемой ПЗС-матрицы, размер изображения интерференционной картины на выходе интерферометра и фокусное расстояние дополнительного объектива. Это можно осуществить, используя следующее соотношение:
 |
где f0, y0 – фокусное расстояние произвольной линзы и размер получаемого при этом изображения в пикселях; f1, y1 – фокусное расстояние подбираемой линзы и требуемый размер изображения.
Существуют общие подходы к обработке интерференционных картин [1]. Но конкретная картина конкретного интерферометра имеет свои особенности. Прежде чем создавать программу обработки частной интерферограммы, необходимо исследовать все ее особенности. Достаточно удобным инструментом для этого является Mathcad. Математические основы обработки цифровых изображений на текущий момент разработаны вполне строго и подробно [2]. С данных позиций интерферограмму, полученную с помощью цифровой видеокамеры, подключенной к интерферометру, следует рассматривать как черно-белое или цветное изображение. С помощью специальной функции Mathcad изображение передается из файла формата BMP на рабочий лист. Каждую строку полученной картины приближаем по методу наименьших квадратов (функция LeastSquaresFit), используя следующее аппроксимирующее выражение:

где L0 – постоянная составляющая сигнала; a0 – амплитудное значение функции распределения яркости; T0 – шаг полос; φ0 – начальная фаза (сдвиг полос относительно левого края картины); Tgl – глобальный период функции, описывающей постепенное уменьшение контрастности полос; φgl – начальная фаза этой функции (принимаем равной φ0).
В результате проведенных с помощью Mathcad исследований было принято решение разработать программу обработки интерференционной картины, основываясь на подборе идеальной функции распределения яркости по методу наименьших квадратов с использованием алгоритма Левенберга-Маркардта. Этот алгоритм широко используется для решения задач из области численных методов [3].
В данной работе алгоритм был реализован в среде C++ Builder 6.0. Это позволило существенно сократить время обработки интерференционной картины (примерно в 120 раз). В частности, для алгоритма, реализованного в среде C++ Builder 6.0, время обработки интерференционной картины размером 1392×1032 составляет порядка 30 секунд. Эта цифра многократно превосходит скорость работы программы, основанной на прямом переборе параметров синусоиды. Такой существенный выигрыш в скорости обработки был достигнут за счет применения быстрого преобразования Фурье и алгоритма Левенберга-Маркардта.
На рис. 1 представлен пример разработанной программы. Две концевые меры длины с номинальным размером 3 мм, предварительно притертые к стеклянной пластине, были установлены на объектном столике интерферометра. С помощью видеокамеры было получено изображение интерференционной картины, появившейся на свободных поверхностях этих мер. В результате работы программы были автоматически распознаны ахроматические полосы на обоих мерах. По результатам расчета относительного смещения этих полос программа рассчитала значение разности высот эталонной и поверяемой мер, которое оказалось равно 23 нм.
В результате проделанной работы была определена методика подбора параметров объектива видеокамеры для подключения ее к интерферометру Кестерса, найден эффективный алгоритм обработки интерференционной картины в белом свете – поиск по методу наименьших квадратов (алгоритм Левенберга-Маркардта), а также создана программа автоматизации относительных измерений на интерферометре Кестерса.
Предметом дальнейших усилий по усовершенствованию созданной программы будут следующие два вопроса. Во-первых, создание процедуры автоматического определения качества распознавания интерференционной картины. Во-вторых, создание процедуры автоматического определения границ концевых мер длины вместе с перекрестием в поле зрения интерферометра.
Список литературы.
1. , Гуров обработка сигналов в приложении к интерферометрическим системам [Текст]. – СПб.: БХВ – Санкт-Петербург, 1998. – 240 с., ил.
2. Красильников обработка изображений [Текст]. – М.: «Вузовская книга», 2001. – 320 с., ил.
3. Практическая оптимизация: Пер. с англ. [Текст]. – М.: Мир, 1985. – 509 с., ил.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.4.
Исследование автоматизированных способов восстановления рельефа поверхности ПО изображению с интерферометра Линника
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – зав. каф. Измерительные информационные системы и технологии», проф.
Москва 2010
Перед началом изложения содержания работы следует рассмотреть общие теоретические вопросы, касающиеся лазерной интерферометрии в конкретном случае интерферометра Линника.
Интерференция волн — наложение волн, при котором происходит их взаимное усиление в одних точках пространства и ослабление – в других. Результат интерференции зависит от разности фаз накладывающихся волн.
На явлении интерференции света как волнового процесса построен принцип работы интерферометров. В общих чертах действие прибора основано на том, что пучок света разделяется на два или большее количество когерентных пучков. Каждый из пучков проходит различные оптические пути и возвращается на экран, создавая интерференционную картину, по которой можно установить смещение фаз пучков. Интерферометры применяются как при точных измерениях длин, в частности в станкостроении и машиностроении, так и для оценки качества оптических поверхностей и проверки оптических систем в целом.
|
|
|
Рис.1. Принципиальная оптическая схема интерференционного микроскопа с пространственно-некогерентным источником света по схеме Линника. |
В интерферометрическом микроскопе Линника в представленной схеме линза 11 расположена на фокусном расстоянии от плоскостей 4, 8 так, что микрообъективы 5, 9 образуют с ней конфокальную пару. Это условие необходимо для того, чтобы изображения различных продольных плоскостей объекта 6 имели одинаковый масштаб. Только при таком расположении линзы 11 отображающая система микроскопа будет инвариантна к сдвигу вдоль оптической оси. Ход лучей при формировании интерференционных картин от других точечных источников, смещенных относительно оптической оси в поперечном направлении, например, в точку А, аналогичен только что рассмотренному.
В пространстве изображений формируется непрерывный набор из пар когерентных волновых полей (предметного и опорного). Каждая такая пара волн создает при регистрации свою собственную интерферограмму.
При настройке микроскопа, например, на полосы конечной ширины, перпендикулярные оси x, уравнение элементарной интерферограммы можно записать в виде:
![]()
где a - угол между предметным и опорным пучками для данного положения точечного источника. Здесь предполагается, что интенсивность обоих этих пучков одинакова и равна i’.
На основании вышеизложенных теоретических выкладок можно сформулировать основные направления исследования возможности восстановления изображения в трёхмерную модель плоскости. Пусть задана некоторая математическая модель поверхности тела с случайным рельефом. На эту поверхность сечётся плоской световой волной и складывается с опорной волной, уравнение которой известно. Необходимо отметить, что на практике нам неизвестны точные наклоны плоскостей, поэтому для каждого конкретного прибора необходимо проводить калибровку по некоторой эталонной поверхности с точно известной формой.
Результатом сложения двух волн ввиду разности хода является интерфернеционная картина, которую в цифровой форме можно представить как двухмерную матрицу, в каждой ячейке которой находится информация об интенсивности света.
Восстановая изображение с помощью функции, обратной косинусу, получаем новую двухмерную матрицу, представляющую собой плоскость разности фаз, однако возникает необходимость создать алгоритм, позволяющий автоматически «разворачивать» функцию арксинуса, то есть после каждого пика и впадины каждого периода функции нужно производить последовательную смену знака, а так же после каждого периода необходимо прибавлять значение π для создания неразрывной плоскости.
Результатом применения такого алгоритма является матрица плоскости, при вычитании из которой матрицы значений опорной волны можно получить исходный рельеф. В восстановленном сигнале имеются остаточные дефекты изображения – срывы, возникающие как погрешность дискретизации и погрешность метода, однако в целом восстановление поверхности производится на основании метода успешно, а имеющиеся выбросы возможно устранить применением фильтрации. В качестве одной из возможных реализаций предлагается применить цифровой рекурсивный фильтр скользящего среднего. Погрешность от применения такого фильтра не превышает двух процентов в единицах входного сигнала (рельефа поверхности).
При переходе от идеальной математической модели к реальной технологической возникают дополнительные источники погрешности, среди которых самыми значительными являются оптические шумы, возникающие в оптической схеме фотографических аппаратов и в ПЗС-матрицах, а так же неравномерность яркости реальных полос, дающих очень неоднородные амплитуды сигнала.
Высокий и даже средний уровень шума в изображении делает невозможным восстановление плоскости светового сечения с помощью функции арккосинуса, однако этот эффект можно устранить применением цифровых фильтров низких частот (в том числе и усредняющих), а так же специальных фильтров, отсеивающих низкоэнергетические участки спектра (что делается из предположения о случайном распределении вероятности возникновения шума).
Нормировка масштаба изображения для целей дальнейшего восстановления теоретически приводит нас к необходимости дополнительной дообработки массива и использованию фильтра высоких частот для устранения эффекта биения сигнала. Таким образом, комплекс обработки матрицы сигналов сводится к применению цифрового полосового фильтра с последующим построением прилегающих плоскостей.
На основании вышеизложенного можно утверждать, что, несмотря на значительные объёмы данных и операций над ними, при настоящем уровне развития вычислительной техники появилась принципиальная возможность модернизации и использования в новом направлении оборудования, обладающего высокими показателями точности, но не отвечающего потребностям современного производства. Данная разработка при должном уровне аппаратной реализации может использоваться в системах автоматизированного контроля, притом не только шероховатости, но и отклонения формы и размеров на микроуровне, так как в ходе исследования принципиальных и непреодолимых теоретических препятствий к этому обнаружено не было.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.5.
Разработка и исследование измерительной головки для координатной измерительной машины
, –каф. «Измерительные информационные системы и технологии»
Научный руководитель – доц. каф. «Измерительные информационные системы и технологии», к. т.н.
Москва 2010
Координатные измерительные машины (КИМ) применяют при измерениях параметров геометрической точности деталей сложной формы и конструкции. В процедуре координатных измерений важнейшую функцию выполняет измерительная головка (ИГ) КИМ, с помощью которой определяется момент касания измерительного щупа с поверхностью измеряемой детали.
Возможны различные принципы функционирования ИГ. Например, в момент соприкосновении щупа и детали происходит переключение контактов электроконтактного датчика ИГ, либо координаты точки регистрируется при возникновении электрического контакта в цепи, образованной измерительным щупом и деталью из электропроводящего материала и т. п..
В докладе приводятся результаты исследования измерительной головки касания, основанной на изменениях параметров колебательного движения вибрирующего измерительного щупа при касании с поверхностью объекта. Аналогичные методы обнаружения поверхности эффективно применяется в зондовой микроскопии, при определении карты модуля упругости, твердости и рельефа поверхности объекта.

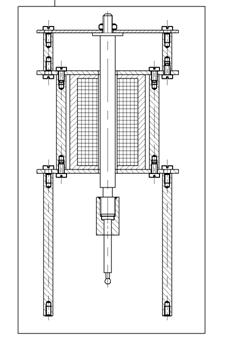
Рис. 1. Внешний вид установки. Рис. 2. Схема ИГ.
Исследования проводятся на основе действующего макета вибрационной измерительной головки, измерительный наконечник которой совершает колебательные движения с задаваемой амплитудой и траекторией. На рис. 1 приведена одна из реализованных схем ИГ. На рис. 2 показан внешний вид установки на базе измерительного микроскопа УИМ-21.
Колебание измерительного наконечника - щупа получено за счет применения вибромотора, выполненного как электромагнитная система. Сердечник, соединенный с измерительным щупом, располагается внутри катушки соленоидного типа и закреплен на упругом подвесе, выполненном диафрагме. При несимметричном расположения сердечника внутри катушки соленоида и неравномерности закрепления диафрагмы появляется возможность управлять направлением колебательного движение измерительного щупа в осевом направлении соленоида и в плоскости XY.
Катушка вибродвигателя подключена к источнику переменного тока. Параметры колебаний щупа сигнала — амплитуда и частота, задаются генератором звуковой частоты Г3-102. После чего сигнал усиливается усилителем мощности и подается на катушку.
На сердечнике установлен датчик колебаний щупа генераторного типа на основе пьезопреобразователя. Сигнал от датчика колебаний исследовался с помощью цифрового осциллографа MSO4000 фирмы Tektronix.
При исследованиях амплитудной частотной характеристики (АЧХ) измерительной головки в свободном (без контакта щупа с деталью) состоянии были установлены несколько зон резонансов системы в областях частот питания вибродвигателя 50, 165 и 500 Гц.
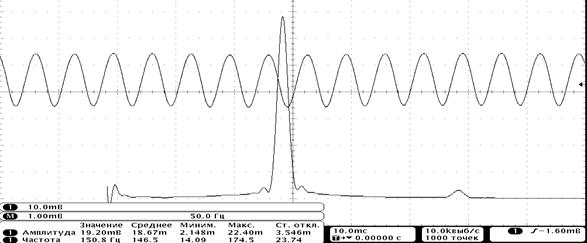
Рис. 3. Сигнал датчика и АЧХ при свободных колебаниях наконечника ИГ.
Обнаружение момента касания можно осуществить по изменению АЧХ сигнала датчика колебаний щупа, а также по изменению параметров электрической цепи системы возбуждения колебаний измерительного наконечника.
Исследования показали, что в момент соприкосновения колеблющегося наконечника происходит значительные изменения АЧХ (рис.4) по сравнению с АЧХ свободных колебаний наконечника в свободном состоянии (рис.3). Высокая чувствительность АЧХ вибросистемы ИГ к факту касания установлена для всех резонансных зон. Проведены исследования влияния скорости подвода ИГ к поверхности измеряемой детали. Установлено, что система одинаково точно формирует признак касания при скоростях подхода от 0,1 до 10 мм/с.
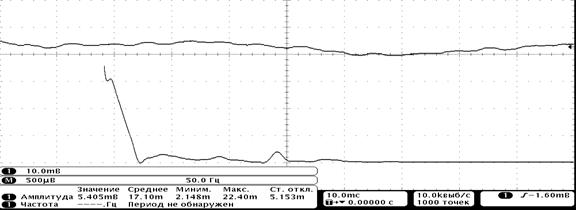
Рисунок 4. Сигнал датчика и его АЧХ при касании наконечника ИГ детали.
Быстродействие ИГ ограничено, быстродействием системы определения изменений АЧХ. В случае применения цифровой системы основными источниками потери быстродействия являются устройства аналого-цифрового преобразования и процедура спектрального анализа. Повышение быстродействия процесса определения момента касания возможно с помощью аппаратных методов аналоговой обработки сигнала вибродатчика. В исследуемой системе предложено применять систему полосовых фильтров, настроенных на диапазоны частот, расположенные вокруг выявленных зон резонанса колебательной системы ИГ. При изменении АЧХ в момент касания изменяется напряжение на выходе полосового фильтра. Это изменение напряжения преобразуется в цифровой сигнал с помощью быстродействующего компаратора.
Проводятся исследования вариантов компоновки вибрационной ИГ с различным расположением и видом источника вибрации измерительного щупа, а различных систем чувствительных преобразователей, определяющих момент касания.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.6.
РАЗРАБОТКА СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ КАЛИБРОВ РАСПОЛОЖЕНИЯ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – доц. каф. «Измерительные информационные системы и технологии»
Москва 2010
Калибры для контроля расположения или формы поверхностей позволяют оценить изделие по признаку «годное» (если отклонение находится в поле допуска расположения или формы) или «брак», не устанавливая действительного значения отклонения формы или расположения. Калибры могут быть применены для контроля соблюдения допусков соосности, симметричности, пересечения осей, допусков перпендикулярности и наклона осей или оси относительно плоскости, позиционных допусков осей или плоскостей симметрии.
Калибры для контроля расположения и формы поверхностей проектируются проходными.
Изделие считается годным, если калибр соединяется с ним (входит в него) по всем контролируемым поверхностям. Контролю расположения или формы должен предшествовать контроль размеров поверяемых поверхностей. Это позволяет предварительно отбраковать изделия по размерам.
По сравнению с универсальными средствами измерения контроль расположения поверхностей калибрами является более производительным и простым. Недостатком калибров, кроме невозможности измерить действительное отклонение, является многообразие типоразмеров, которые зависят от размеров, конфигурации и допусков контролируемых изделий. Поэтому калибры находят применение в основном при серийном и массовом производстве изделий.
В данной работе рассматривается система автоматизированного проектирования калибров расположения на примере калибра для контроля расстояния между осями двух отверстий. Это расстояние контролируется парой проходных калибров по следующей схеме (рис.1 и рис.2):
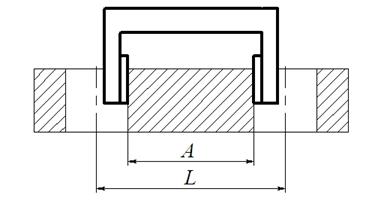
Рис.1. Эскиз части А калибра (между ближними стенкам отверстий).
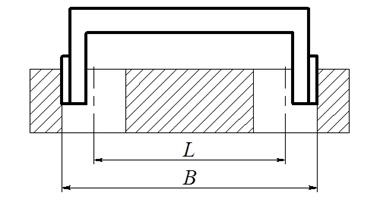
Рис.2. Эскиз части В калибра (между дальними стенками отверстий).
Изделие считается годным, если в него проходят оба калибра (с размерами А и В), входящие в комплект.
Входными параметрами для построения таких калибров являются взятые с чертежа контролируемой детали наименьшие предельные размеры диаметров отверстий (D1min, D2min) и номинальное значение расстояния между их осями (L) с соответствующим допуском (Tp).
Расчет предельных размеров калибров производится по следующим формулам:
![]()
![]()
![]()
![]()
![]()
![]()
где А, В – номинальные размеры между измерительными элементами калибров-скоб; Amax, Amin, Bmax, Bmin – соответственно наибольшие и наименьшие предельные значения размеров А и В для новых калибров скоб; Aw, Bw – значения размеров А и В для предельно изношенных калибров-скоб, F – основное отклонение измерительного элемента калибра, W – допуск на износ измерительных элементов калибра.
Рассмотрим полный цикл работы системы:
1. Ввод данных пользователем:
· расстояние между осями (L);
· допуск на расстояние между осями (буква основного отклонения и номер квалитета или значение допуска непосредственно с чертежа);
· диаметр первого отверстия (D1);
· допуск на первый диаметр (буква основного отклонения и номер квалитета или значение допуска непосредственно с чертежа);
· диаметр второго отверстия (D2);
· допуск на второй диаметр (буква основного отклонения и номер квалитета или значение допуска непосредственно с чертежа).
2. Определяется вид конструкции калибра и материал его корпуса. Кроме того, определяются все конструктивные размеры проектируемого калибра (на основе ГОСТов калибров-скоб для контроля диаметров валов).
3. Система определяет отклонения и допуски измерительных элементов калибров (F, W) по специально созданной базе данных.
4. Система определяет числовые значения таких параметров как основное отклонение и поле допуска, необходимых для дальнейшего расчета исполнительных размеров проектируемого калибра по ГОСТ .
5. Система производит расчет исполнительных размеров калибра на основе введенных данных и корректировку рассчитанных исполнительных размеров с целью правильного отображения их на чертеже.
6. Система выбирает шероховатость поверхностей в соответствии с введенными исходными данными.
7. Строится рабочий чертеж калибра с простановкой всех необходимых размеров и требований к точности изготовления всех его элементов, а так же с необходимыми техническими условиями и обозначением материала корпуса калибра.
Данный проект реализован средствами полнофункциональной системы автоматизированного проектирования T-FLEX CAD. Выбор рабочей среды основан на следующих преимуществах:
1. Использование параметризации и адаптивных элементов в T-FLEX CAD значительно упрощает процедуру внесения в модель изменений, позволяя автоматически распространить необходимые изменения по всему проекту. Переменные могут быть связаны в математические или логические выражения. Значения переменных можно изменять, непосредственно перемещая элементы модели или чертежа, или задавая их значения в редакторе переменных, или считывая их из внешних файлов баз данных. Широкие возможности параметризации в T-FLEX CAD обеспечивают максимальную эффективность при проектировании.
2. Пользователи T-FLEX CAD могут управлять параметрической моделью, создавая собственные диалоговые окна непосредственно внутри документа. Это простой и удобный способ, не требующий навыков программирования или дополнительного программного обеспечения.
3. T-FLEX CAD поддерживает оформление чертежей в полном соответствии с ЕСКД и международными стандартами (ISO, DIN, ANSI).
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.7.
МЕТОД БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ФОРМЫ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – преп. каф. «Измерительные информационные системы и технологии», маг. т. т. В
Москва 2010
Рассматриваемый метод бесконтактного измерения формы основывается на построении трехмерного облака точек с помощью цифрового проектирования интерференционными полосами. Такой способ обладает высоким быстродействием, гибкостью, невысокой стоимостью и потенциально высокой точностью.
Простейшая система (рис. 1), основанная на этом методе, состоит из проектора, камеры и устройства для обработки данных (например ПК). На исследуемый объект проецируется структурированное изображение (с помощью проектора), затем цифровой камерой регистрируется отраженное изображение. Из-за того, что исследуемый объект имеет сложную форму, изображение посланное проектором исказится. На основе этого явления происходит построение 3-d модели объекта. Для увеличения точности считывание изображения проводится несколько раз.
 |
Рис 1: Схема измерительной системы
Чтобы получить абсолютную карту фаз исследуемого объекта, используется ряд шаблонов проектирования (видов структурированного освещения исследуемого объекта). Быстродействие системы зависит от аппаратной производительности ее компонентов, а также от количества используемых шаблонов.
Оптическая модель описывает связь между получаемым изображением и формой поверхности объекта, используя специальные уравнения, полученные из оптических моделей камеры и проектора.
Модель калибровочной матрицы использует коэффициенты матрицы, чтобы описать величину измерения, взятого на пересечении областей проекции с проектора и полученной камерой. Для каждого пикселя изображения вычисляется значение соответствующей функция, с помощью чего определяется значение координат (X, Y, Z) точки на объекте.
Для создания математической модели системы была использована модель камеры с точечным отверстием, как для самой камеры, так и для проектора.
Объект освещается кодированным световым сигналом, где световой сигнал модулируется синусоидальной функцией, которая описывается формулой:

Для построения карты фаз необходимо получить 8 изображений объекта, с использованием схемы трех уровней чувствительности, которую можно задать формулой:

где k - уровни чувствительности, n - частота смены фаз,  - функция фазы, ск - коэффициент масштаба, n=1,2,3,4- предоставляет различие в сдвигах фаз для изображений одного уровня чувствительности. Пример получаемых изображений показан на рис. 2.
- функция фазы, ск - коэффициент масштаба, n=1,2,3,4- предоставляет различие в сдвигах фаз для изображений одного уровня чувствительности. Пример получаемых изображений показан на рис. 2.
Последовательно проектируя образцы интерференционных полос различного уровня на исследуемый объект получаем восемь изображений, которые можно описать следующей формулой:

где k=0,1,2- уровни чувствительности фазы, n=1,2,3,4- предоставляет различие в сдвигах фаз для изображений одного уровня чувствительности, A(i, j) и B(i, j)-постоянные коэффициенты для пиксела (i, j) во всех восьми изображениях.
Рис 2: Ряд изображений для построения карты фаз
Коэффициент A(i, j) вычисляется следующим образом:

Используя коэффициент A(i, j) вычислим карты фаз ![]() и
и ![]() :
:

На рис 3 показана геометрическая схема построения 3-D облака точек.
 |
Рис. 3: Построение облака точек
Точка ![]() - это пиксел с координатами (u, v) на плоскости изображения камеры. Точка М лежит на прямой CMI . Тогда точка MR лежит на прямой CMI в базовой плоскости, а точка NR расположена на пересечении прямой PM с базовой плоскостью Определим точку Q как пересечение прямой CMI c прямой, параллельной базовой плоскости и проходящей через точку P.
- это пиксел с координатами (u, v) на плоскости изображения камеры. Точка М лежит на прямой CMI . Тогда точка MR лежит на прямой CMI в базовой плоскости, а точка NR расположена на пересечении прямой PM с базовой плоскостью Определим точку Q как пересечение прямой CMI c прямой, параллельной базовой плоскости и проходящей через точку P.
Используя математическую модель камеры с маленьким отверстием, находим 3-D координаты точек MR и NR:
 ,
,  .
.
Координату точки Q вычислим следующим образом:
 .
.
Найдем координату точки М, которая одновременно является вершиной двух треугольников: MMRNR и MQP.
 .
.
Алгоритм оценки параметров состоит из этапа калибровки камеры по калибровочной пластине и оценки положения центра проектирования.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.8.
ПРИМЕНЕНИЕ ДЕТЕРМИНИРОВАННОГО ХАОСА ДЛЯ ОБЕСПЕЧЕНИЯ КОНФИДЕНЦИАЛЬНОСТИ ПЕРЕДАЧИ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – д. т.н., проф. каф. «Измерительные информационные системы и технологии»,
Москва 2010
Под детерминированным хаосом понимаются такие нелинейные динамические системы, поведение которых внешне оценивается как случайное, но в то же время однозначно определено математически. Поведение системы при этом изменяется в зависимости от значений управляющих параметров по экспоненциальному закону. Высокая чувствительность к изменениям параметров обеспечивает хорошую управляемость ее состоянием.
Внешнее сходство со случайными колебаниями и невозможность детектирования без знания значений управляющих параметров открывают для хаотических сигналов возможность широкого применения в целях соблюдения конфиденциальности передаваемой информации. Информационный сигнал при этом маскируется хаотическим сигналом.
В данной работе рассматривается схема с нелинейным подмешиванием, при которой информационный сигнал складывается с хаотическим сигналом, располагаемым в том же частотном диапазоне. Эта схема предполагает использование двух взаимообратных операций на передатчике и приемнике. Предлагается использовать в качестве взаимообратных операций сложение и вычитание (т. к. при замене их на умножение и деление соответственно, возникает ряд трудностей, связанных с невозможностью деления на ноль).
Таким образом, на передающем конце осуществляется подмешивание информационного сигнала к сигналу хаотической системы при помощи введения его в кольцо обратной связи генератора, а на приемнике, в свою очередь, происходит выделение информационного сигнала путем размыкания обратной связи и добавления в схему вычитателя.
Было проведено моделирование в среде MathCAD хаотической системы на основе уравнения Дуффинга

с параметрами:
![]() .
.
Исследования показали, что получаемый в результате моделирования сигнал ![]() обладает сложной структурой спектра. Для выделения сигнала, необходимого для подмешивания к информационному сигналу, был использован фильтр Баттерворда нижних частот. В результате был сформирован сигнал
обладает сложной структурой спектра. Для выделения сигнала, необходимого для подмешивания к информационному сигналу, был использован фильтр Баттерворда нижних частот. В результате был сформирован сигнал ![]() , фрагмент которого представлен на рис.1. На рис. 2 изображен фазовый портрет сигнала, иллюстрирующий его случайный (странный) характер.
, фрагмент которого представлен на рис.1. На рис. 2 изображен фазовый портрет сигнала, иллюстрирующий его случайный (странный) характер.
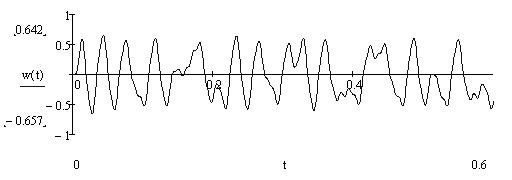
Рис. 1 Фрагмент хаотического подмешиваемого сигнала
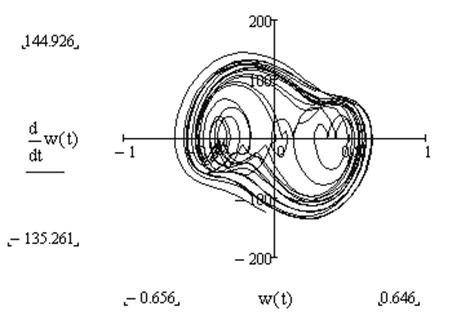 |
Рис. 2. Фазовый портрет сигнала
Далее используется следующий алгоритм передачи информационного сигнала:
- сигнал смешивается с хаосом с помощью сумматора,
- производится амплитудная, фазовая или частотная модуляция полученного смешанного сигнала и передача модулированного сигнала,
- на приемной стороне выделяется обычными способами демодуляции переданный смешанный сигнал,
- из смешанного сигнала вычитается хаотический сигнал, при этом время смещения по времени хаотического сигнала и масштабный фактор вычисляются таким образом, чтобы обратить в минимум мощность выделяемого сообщения.
Относительная погрешность восстановления сигнала при амплитудной модуляции составила порядка 1,4%.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.9.
РАЗРАБОТКА СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ УГЛОВОГО ОТКЛОНЕНИЯ ПЛАТФОРМЫ В ДВУХ НАПРАВЛЕНИЯХ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – преп. каф. «Измерительные информационные системы и технологии»,
Москва 2010
С древнейших времен люди сталкивались с необходимостью измерять угловые величины. Понятие градуса и появление первых инструментов для измерения углов связывают с развитием цивилизации в древнем Вавилоне, хотя само слово градус имеет латинское происхождение (градус – от лат. gradus – “шаг, ступень”). При измерении угловых размеров следует пользоваться следующими методами:
· сравнение с мерой, имеющей постоянное значение (меры угловые призматические, угольники, конусные калибры);
· сравнение с углом на величину которого настроен прибор (синусные линейки и приборы, основанные на использовании принципа синусной линейки);
· сравнение с угловой шкалой прибора (оптическая делительная головка, гониометр, угломер, уровень);
· определение угла измерением координат образующих угол (микроскоп, координатно-измерительная машина, пневматические калибры-пробки для измерения конуса и т. д.).
Более подробно автором работы рассмотрен метод сравнения с угловой шкалой прибора, уровни:
· лазерный уровень (нивелир)
· водяной уровень
· прямой уровень с воздушным пузырьком;
Обычно уровень представляет собой брусок с укреплённой в нём прозрачной ампулой бочкообразного продольного сечения, открытой для обозрения. Ампула содержит подкрашенную жидкость (обычно используется спирт, так как он обладает низкой температурой замерзания) с небольшим пузырьком газа. При горизонтальном положении ампулы пузырёк находится точно посередине ампулы.
Брусок обычно изготавливается из пластмассового или металлического профиля. Такой выбор материала сводит к минимуму деформации, которые могут влиять на точность измерения.
Применяют уровни с различным числом ампул. Чаще всего обязательно присутствует ампула, ориентированная вдоль оси бруска. Она используется для определения горизонтальности линий или поверхностей. Кроме того, применяют ампулы, ориентированные перпендикулярно или под заданным углом к оси бруска. Развитием этой идеи являются уровни с поворачивающейся ампулой, которая фиксируется в любом или одном из нескольких положений. Тогда рядом с ампулой изображается шкала, по которой можно определять угол поворота.
Большой проблемой при использовании уровней является тот факт, что они выполнены в виде бруска фиксированной длины. Для проверки ориентации линии или поверхности необходимо разместить уровень целиком вдоль линии.
Проблемы измерения на расстояниях, превышающих длину уровня, и помех на участке измерения могут быть решены с помощью гибкого гидроуровня или лазерного уровня.
Ещё одна возможная проблема использования уровня — снижение точности установки ампул в теле бруска, что происходит от падений инструмента, неизбежных при работе.
Существуют такие конструкции уровней, которые позволяют компенсировать эти погрешности. Так, например, с помощью акселерометра можно измерять наклон основания, на котором он установлен. Помимо измерения угла наклона, акселерометры используются во многих приложениях. К ним относятся измерители вибраций, ударов, движения, поверхностных уровней и т. д.
|
|
|
Рис.1 – Внешний вид датчика ускорения |

Автор работы участвовал в разработке макета электронного уровня на основе акселерометра ADXL202AE (Рис. 1), для которого было разработано программное обеспечение на языке С++. Отладочная плата с датчиком ускорения передает измеренное значение через аппаратный мост UART-USB данные в компьютер. Специализированное программное обеспечение на компьютере обрабатывает информацию об ускорении и пересчитывает величину угла и отображает на экране монитора положение виртуального шарика в наклонной плоскости системы координат акселерометра.
Кажущееся ускорение в свою очередь является равнодействующей сил негравитационной природы, которая действует на массу и отнесенная к величине самой массы. Наиболее активно такие устройства применяются в ноутбуках Apple Macbook и телефонах iPhone. На основе данной технологии построены многочисленные игры, программы, системы управления. А также подобные системы применяются в электронных уровнях, что учитывая постановку задачи, является наиболее актуальной задачей в рамках работы.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.10.
ИССЛЕДОВАНИЕ ОПТИЧЕСКОГО МЕТОДА ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – к. т.н. , каф. «Измерительные информационные системы и технологии»
Москва 2010
При измерениях в промышленности широко используются средства измерения (СИ), основанные на различных физических эффектах.
На кафедре ИИСиТ в последнее время особое внимание уделяется исследованию бесконтактных СИ, основанных на применении лазерных и оптических технологий.
В частности предлагается метод измерения линейных размеров, в основе которого лежит компьютерная обработка оптического изображения (снимка) исследуемого объекта. В поле изображения располагаются две концевые меры длины (КМД) и сам измеряемый объект. По двум КМД производится калибровка системы и устанавливается соответствие между одним пикселем изображения и длиной в микрометрах. Размер объекта измеряется в пикселях и, затем, на основе полученного соотношения, определяется в микрометрах. Использование современных оптических средств и компьютерных пакетов обработки данных позволяет обеспечить высокое качество получаемого изображения, простоту конструкции системы и автоматизацию процесса обработки полученной информации и получение результата.
В лабораторных условиях были проведены исследования, целью которых являлось определение метрологических характеристик системы, основных источников неопределенности и зависимости точности измерений от качества изображения (снимка) и взаимного расположения КМД и объекта. В эксперименте использовались два варианта взаимного расположения КМД и объекта – горизонтальный и вертикальный (Рисунок 1). Снимки производились с разрешающей способностью 2 Мп, 6 Мп и 10 Мп (Мп - мегапиксель) и равномерной подсветкой фона, что исключило необходимость яркостной коррекции. Обработка полученных изображений производилась в пакете прикладных программ MATLAB. С помощью программной обработки были найдены параметры средних плоскостей на границах перехода «объект-фон» и реализован метод определения «длины» одного пикселя, с использованием номинальных размеров КМД, то есть, реализована калибровка системы. Результаты эксперимента позволили определить метрологические характеристики системы, установить прямую зависимость между качеством изображения (снимка) и точностью определения размера и выявить основные источники неопределенности и способы их устранения.
Результаты эксперимента позволяют сделать вывод об удобстве применения этого метода для решения ряда задач измерения размера объекта и/или величины его перемещения.

Рисунок 1. Варианты расположения двух КМД и объекта с равномерной подсветкой фона.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.11.
Разработка информационно-измерительной системы для измерения поверхностных неровностей
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – доц. каф. «Измерительные информационные системы и технологии»,
Москва 2010
Шероховатость поверхности является одной из основных характеристик геометрической точности детали и определяет важнейшие эксплуатационные показатели. Разработка информационно-измерительной системы (ИИС) для измерения поверхностных неровностей является актуальной проблемой.
Структурная схема ИИС для измерения поверхностных неровностей показана на рис.1.
Рис.1 Структурная схема ИИС
ИИС построена на базе профилографа-профилометра модели 252 завода «Калибр», включает плату сбора данных L-CARD E-140 и персональный компьютер с установленным программно-математическим обеспечением (ПМО), структура которого показана на рис.2.
Рис.2 Структурная схема ПМО
В информационно-измерительной системе реализовано:
· определение коэффициентов пересчета выходных сигналов платы сбора данных в линейные размеры неровностей;
· выравнивание профилограммы с помощью метода наименьших квадратов;
· вычисление стандартизованных и не стандартизованных параметров шероховатости;
· управление частотой дискретизации;
· построение спектральных характеристик;
Разработана экспериментальная установка и проведены исследования зависимости спектральных характеристик профиля от видов и режимов обработки, рассчитаны параметры шероховатости и построены спектральные характеристики (рис.3.1 и рис.3.2).
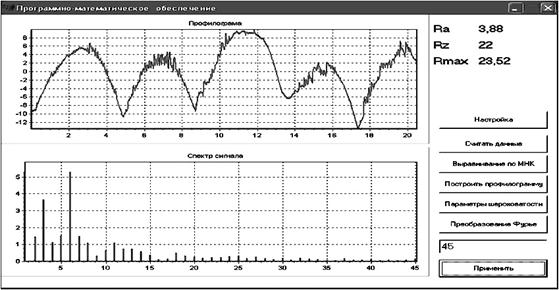
Рис.3.1 Образец обработан точением (Ra 3,88 мкм)
Рис.3.1 Образец обработан точением (Ra 8,01 мкм)
Установлено, что с изменением параметров резания изменяется структура профиля (увеличивается или уменьшается количество периодов на одной и той же базовой длине и изменяется форма неровностей), а также происходит изменение спектральных характеристик.
Разработаны параметры для оценки особенностей геометрии зон перехода (ступенек подложек, поверхности формирующейся при травлении или напыления на подложки рис.4).
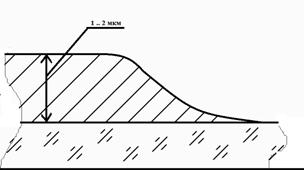
Рис. 4 Ступенька при травлении.
В качестве не стандартизованных параметров ступеньки могут использоваться средний наклон, протяженность и гладкость зоны перехода. Такие параметры необходимо измерять в микроэлектронике и микропроцессорной технике.
Отдельным классом задач оценивания поверхностных неровностей являются измерение размеров изъянов поверхности таких как отдельно расположенные риски (рис.5.1), трещины (рис.5.2), царапины (рис.5.3).
Рис.5.1 Риска Рис.5.2 Трещина Рис.5.3 Царапина
Такие типы неровностей отличаются от неровностей, составляющих шероховатость поверхностей, но они также могут повлиять на качественные и эксплуатационные показатели. Поэтому измеряют ширину, глубину, длину и площадь поверхности изъяна.
Создание подобной измерительной системы позволяет проводить комплекс исследований поверхностных неровностей, исследование различных технологических процессов по структуре формирующихся поверхностей, измерение не стандартизованных параметров шероховатости. А также изучение топографических (т. е. пространственных) характеристик шероховатости.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.12.
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО ПРОЕКТИРОВАНИЯ СПЕЦИАЛЬНЫХ СРЕДСТВ ИЗМЕРЕНИЙ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – доц. каф. «Измерительные информационные системы и технологии»,
Москва 2010
В производственной практике не редко встречаются случаи, когда для изготавливаемой детали требуется проектировать специальное средство измерения или контроля. При использовании системы автоматического проектирования специальных средств измерений (САП ССИ) есть возможность параметрического проектирования, что позволяет при изменении размеров или контролируемых параметров детали не проводить повторного проектирования таких средств.
При разработке САП ССИ основной задачей является обеспечение необходимой точности измерения. Следует рассматривать инструментальную погрешность, как часть допустимой погрешности, которая, в свою очередь, определяется измеряемым размером и полем допуска на него. Для рассмотрения принципов построения САП ССИ возьмем специальное средство измерения внутренних диаметров отверстий на заданной глубине, принципиальная схема которого показана на рисунке 1. Данное средство измерения используется на предприятии ».

|
Из за большого объема эта статья размещена на нескольких страницах:
1 2 3 4 5 |
