


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Инструментальная погрешность ССИ dинс может быть определена по формуле dинс = A[d], где [d] – допустимая погрешность, А – коэффициент, зависящий от метода измерения. По данным научно-технической литературы для метода сравнения с мерой, который используется в данном ССИ, А = 0,7.
Инструментальная погрешность, в свою очередь, так же является комплексной величиной. Для данной схемы можно выделить следующие составляющие:
- Погрешность отсчетного устройства.
- Погрешность рычажного механизма.
- Погрешность базирования средства измерения на измеряемой детали.
Рассмотрим подробнее каждую составляющую инструментальной погрешности.
1. Погрешность отсчетного устройства (ОУ). Эта погрешность определяется используемым отсчетным устройством (1). Для выбора ОУ необходимо определить погрешность ОУ на нормируемом участке dоу, диапазон показаний Dоу и цену деления i. По данным научно-технической литературы dоу = B[dинс], где B - коэффициент, зависящий от схемы ССИ. В данном случае он может быть принят равным 0,7. Таким образом, на оставшиеся составляющие инструментальной погрешности приходится 0,3[dинс].
Цена деления и диапазон показаний могут быть определены по следующим выражениям: Dоу ≥ Т, i ≤ Т/5, где Т – допуск на контролируемый диаметр. Исходя из рассчитанных значений dоу, Dоу и i по базе данных ОУ производится их выбор и уточнение этих характеристик.
При проектных расчетах инструментальной погрешности обычно допускаемое значение погрешности распределяют равномерно по составляющим. Из выше изложенного следует, что погрешность рычажного механизма dрм и погрешность базирования dбаз равны и принимают значения не более 0,15[dинс].
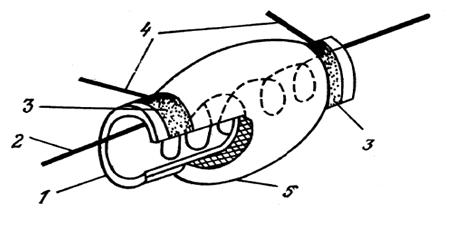
2. Погрешность рычажного механизма. В состав погрешности рычажного механизма входят: погрешность шарнира (2), которая вызывает погрешность обратного хода; погрешность, вызываемая изгибом рычага (3) под действием измерительного усилия; погрешность, вызываемая контактной деформацией рычага; погрешность, обусловленная неравными плечами самого рычага. Последние три погрешности для данного примера можно не учитывать, ввиду того, что погрешности, вызываемые изгибом и контактными деформациями рычага, пренебрежимо малы, а погрешность, обусловленная неравными плечами, исключается при настройке средства измерения по мере.
Погрешность шарнира определяется выбором используемого подшипника. В зависимости от величины dрм = 0,15[dинс] можно использовать подшипники скольжения, качения или упругие, которые выбираются из специально созданной базы данных подшипниковых узлов.
3. Погрешность базирования средства измерения на измеряемой детали. В состав данной погрешности входят составляющие, которые обусловлены следующими факторами: перекос струбцины (4) и ее прогиб под собственным весом. Расчеты показали, что величина прогиба пренебрежимо мала, поэтому в данном примере вся погрешность базирования определяется перекосом струбцины, что приводит к смещению линии измерения. Перекос струбцины вызван неточностью изготовления и сборки элементов базирования (5). Зная dбаз = 0,15[dинс], можно определить точность отдельных элементов базирования с помощью расчета размерных цепей.
Для большей наглядности на рисунке 2 приведена схема распределения инструментальной погрешности на составные части.
Таким образом, для создания САП ССИ необходимы следующие элементы:
1. Графический редактор с возможностью параметрического проектирования, например Т-flex CAD.
2. Параметрические сборочные и рабочие чертежи проектируемого ССИ.
3. Базы данных применяемых отсчетных устройств с их метрологическими характеристиками и базы данных подшипниковых узлов.
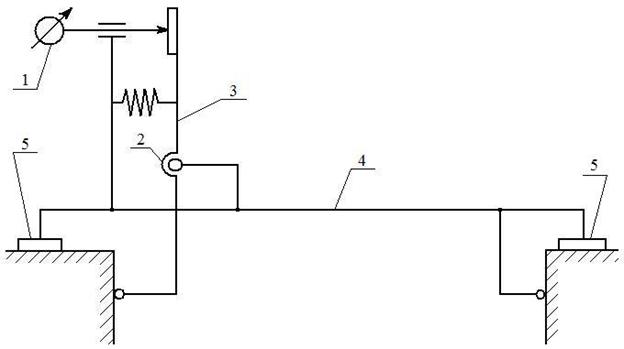
Рис. 1. Принципиальная схема ССИ внутренних диаметров отверстий на заданной глубине.
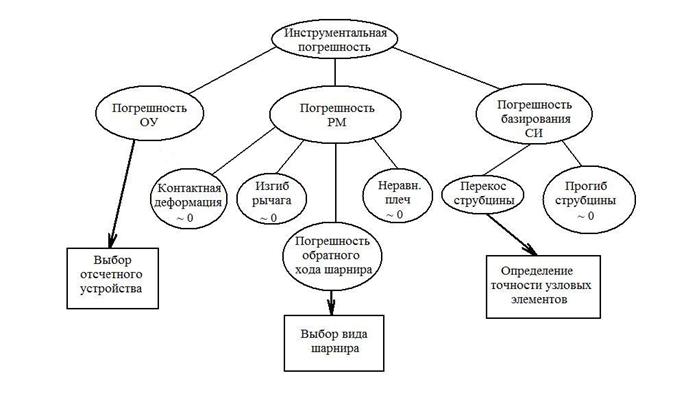
Рис. 2. Схема распределения инструментальной погрешности на составные части.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.13.
Требования к методикам анализа эффективности инвестиций в ИТ-инфраструктуру предприятия
– каф «Информационные технологии и вычислительные системы»
Научный руководитель – к. т.н., доц., , каф. «Информационные технологии и вычислительные системы»
Москва 2010
Анализ эффективности инвестиций в информационные технологии (далее – ИТ), часто принимает неформальный характер; руководители ИТ-отделов полагаются на собственный опыт, либо на оценки «экспертов». Рассмотрим основные требования, предъявляемые к существующим методикам проведения анализа ИТ-инвестиций:
· метод анализа эффективности должен быть строго обоснован, в нем не должно быть противоречий содержательного и формального характера;
· метод должен учитывать важнейшие свойства исходной информации, используемой для расчета показателей эффективности (случайный характер изменения во времени показателей ИС и разновременность затрат и доходов);
· метод должен допускать только однозначное толкование и позволять с единых принципиальных позиций подходить на разных этапах разработки, внедрения и функционирования систем.
Примером последнего требования служит метод определения совокупной стоимости владения (Total Cost of Ownership, TCO). Ключевым моментом является сравнение частных показателей ТСО предприятия с показателями ТСО других компаний аналогичного профиля. Отсутствие единых принципиальных позиций в методике определения и анализа ТСО на различных предприятиях делает его применение бессмысленным.
Важное требование вытекает при неправомерных сравнениях, возникающих в ходе анализа эффективности инвестиций. Наиболее частым примером является сравнение компьютеризированного труда с идентичной работой, выполняемой вручную. Поэтому методика проведения анализа ИТ-инвестиций должна иметь сравнительный характер, причем в следующих двух аспектах:
· сопоставление внедряемой технологии должно проводиться с уже существующими на предприятии системами и технологиями с целью определения степени оптимизации процессов;
· сопоставление должно проводиться с вариантами, аналогичными по функциональности и отраслевой принадлежности, представленными на рынке и внедренными на предприятиях-конкурентах, что объясняется необходимостью сравнивать собственные решения с решениями конкурентов.
Также методика анализа должна позволять выделять из общего повышения эффективности бизнеса часть, связанную с внедрением новой информационной системы. Однако нередко внедрение ИТ сопровождается реинжинирингом бизнес-процессов. Так, при информатизации процессов уже давно признана необходимость проведения в ходе таких проектов организационных и культурных изменений, например, внедрение принципа сквозного параллельного проектирования. Поэтому, рассчитывая эффект от реализации ИТ-проекта, мы определяем эффективность внедрения не только новой системы, но и новых принципов работы: первое предполагает автоматизацию или механизацию, второе - организационную инновацию. Следовательно, методика анализа должна обладать свойством системности, позволяя выделять из общего повышения эффективности бизнеса часть, связанную с реализацией мероприятий конкретного ИТ-проекта как единого целого, что определяет получение синергетического эффекта.
Дальнейшее развитие методов анализа ИТ-инвестиций должно помочь не только определить экономию материальных ресурсов или риск появления «упущенных возможностей», но и определить способы расчета дополнительных преимуществ перед конкурентами. Таким образом, методика оценки эффективности внедрения новых ИТ должна иметь комплексный характер по отношению к выбору источников эффективности: помимо экономии традиционно выделяемых производственных ресурсов предприятия оценивать прирост видов ресурсов, не отражаемых в бухгалтерской отчетности.
Указанные новые виды «ресурсов» не всегда могут быть оценены количественными показателями, поэтому комплексный характер методики должен проявляться и при выборе показателей для оценки изменений. Предпочтительно комбинированное использование качественных и количественных показателей.
В наибольшей степени приведенным требованиям соответствовуют методы, разрабатываемые в рамках качественного подхода. Они могут сочетать в себе элементы других классов методов: финансовые критерии можно использовать для определения материальных затрат и выгод ИТ-проекта, для приведения их к единому моменту времени; вероятностные - для определения риска достижения плановых показателей ИТ-проекта. Остальные составляющие оценки должны быть доработаны специалистами предприятия в соответствии с его спецификой.
Главная особенность качественных методов заключается в возможности описать способ определения соответствия ИТ-проекта бизнес-стратегии предприятия и его вклада в достижение предприятием своих стратегических целей. Данный подход следует считать более прогрессивным и принять в качестве дополнительного требования ко вновь разрабатываемым методам анализа.
Финансовые и вероятностные методы оперируют понятиями денежных потоков, стратегические цели предприятия, как правило, ориентированы на получение определенных социально-экономических результатов в продолжительной перспективе; завоевание позиции лидера в своём рыночном сегменте; усиление противодействия конкурентным силам рынка, определяющим привлекательность отрасли и позиции данной компании в конкурентной борьбе.
Наиболее важной характеристикой предприятия является способность завоевать либо отстаивать свою конкурентную позицию на рынке. Следовательно, показатель конкурентоспособности предприятия может стать отправной точкой построения системы показателей оценки эффективности ИТ-инвестиций. Однако главной проблемой в этом случае является реализация в модели оценки эффективности ИТ-инвестиций их связи с конкурентоспособностью предприятия. Для решения возможно использование метод декомпозиции стратегических целей. Его реализацию можно представить поэтапно:
|
Шаг 1 |
Анализ и формулировка тенденций и перспективных направлений развития; |
|
Шаг 2 |
Формулировка стратегических целей; |
|
Шаг 3 |
Формулировка задач в соответствии со стратегическими целями, с упором на развитие ИТ-среды; |
|
Шаг 4 |
Составление плана ИТ-проектов и формулировка цели для каждого из них; |
|
Шаг 5 |
Переход к текущему планированию развития в рамках плана ИТ-проектов. |
Последний этап позволяет перейти на уровень конкретных ИТ-проектов, обозначить показатели оценки их эффективности и, следуя в обратном направлении по указанным шагам, прийти к композиции параметров конкурентоспособности и финансовых показателей деятельности предприятия.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.14.
МЕТРОЛОГИЧЕСКИЕ ВОПРОСЫ ВИБРОДИАГНОСТИКИ ШПИНДЕЛЬНЫХ УЗЛОВ
–. каф. «Измерительные информационные системы и технологии»
Научный руководитель – к. т.н., доц. , каф. «Измерительные информационные системы и технологии
Москва 2010
Работа посвящена рассмотрению вопросов анализа методики вибродиагностики высокоскоростных шпинделей станков, так как выявление источников вибраций с последующим принятием решений по улучшению динамических характеристик шпиндельного узла является необходимым при разработке оборудования.
Шпиндельные узлы (ШУ) предназначены для осуществления точного вращения инструмента или заготовки и в значительной степени определяют качество обработки, поэтому задача повышения виброустойчивости шпиндельных узлов станков является актуальной и важной с точки зрения обеспечения точности.
Поэтому целью данной работы является исследование метрологических аспектов методик проведения виброиспытаний шпинделей станков.
В соответствии с поставленной целью необходимо решить следующие задачи:
1. анализ нормативных документов, посвященных контролю виброхарактеристик узлов машин,
2. разработка методики проведения виброиспытаний ШУ 16К20,
3. разработка ИИС на базе станка для проведения виброиспытаний
4. анализ метрологических характеристик устройств и средств измерений, входящих в ИИС
5. анализ результатов виброиспытаний
6. определение составляющих погрешности.
Для решения первой задачи были проанализированы стандарты: ГОСТ Р ИСО «Контроль состояния машин по результатам измерения вибрации на вращающихся валах», ГОСТ Р ИСО «Контроль состояния машин по результатам измерения вибрации на невращающихся частях», ИСО 2 «Контроль состояния и диагностики машин – Вибрационный контроль машин», часть 1, МИ 2377-98 «Разработка и аттестация методик выполнения измерений», «Методика диагностики и расчета характеристик деталей металлорежущих станков» (ЭНИМС, 2009), в которых установлены общие требования к измерениям вибрации станочного оборудования и изложены основные положения разработки методик их выполнения.
На основании этих документов была разработана методика, включающая в себя следующие этапы:
1. Рассмотрение характеристик объекта измерений, причем объектом испытания являлся шпиндель токарно-винторезного станка 16К20, основными техническими характеристиками которого являются число ступеней частот вращения шпинделя (23), пределы частот вращения шпинделя (до 2000 об/мин), наибольший крутящий момент (2 кНм), мощность электродвигателя привода главного движения (10 кВт).
2. Обеспечение нормальных условий измерений в соответствии с ГОСТ Р ГСИ 8. Метрологическое обеспечение измерительных систем.
3. Выбор метода и средств измерения:
В качестве метода измерений применяется метод ударного возбуждения. Процедура измерений состоит в следующем:
1. Намечается система координат, определяющих, по мнению исследователя, достаточно полную картину движения колебательной системы исследуемого объекта.
2. Выбирают 9 характерных точек конструкции на ШУ станка 16К20, в каждую из которых точку поочередно устанавливается акселерометр. В соответствии с ГОСТ Р ИСО «Контроль состояния машин по результатам измерения вибрации на вращающихся валах» датчик располагают в радиальном направлении, так, чтобы ось его чувствительности отстояла от радиального направления не более чем на ±5°.
3. Шпиндель приводится во вращение и измерения проводятся на частоте, равной 400 Гц при нормальных условиях.
4. Производится серия однотипных ударов динамометрическим молотком в направлении каждой из координат в соответствии с методом ударного возбуждения, который заключается в том, что производится удар по конструкции в выбранных направлениях специальным молотком с встроенным в него датчиком силы. При этом измерение возбуждения производится в фиксированном направлении при перемещении датчика вибрации по точкам конструкции.
5. По результатам импульсного возбуждения одновременно фиксируются спектры ударного воздействия и вибрационного отклика.
6. Определяются соответствующие частотные характеристики - рис. 2., где спектр 1 показывает входной сигнал от силового возбуждения; спектр 2 – сигнал-отклик на силовое возбуждение; АЧХ – амплитуда колебания в данной точке ШУ, которая строится путём деления спектра 2 на спектр 1; фаза – определяет направление формы колебания; а Ког – функция когерентности, которая определяет достоверность полученных сигналов.
7. Полученные после цифровой обработки сигналов функции для анализа системы и сигналов просматриваются, формируются на дисплее и выводятся на внешние устройства - графический регистратор.
Для реализации методики виброиспытнаий была разработана ИИС, структурная схема которой приведена на рис. 1. Метрологические характеристики входящих в ИИС средств измерений выбирались в соответствии с техническими характеристиками шпиндельного узла, приведенными выше.
Так акселерометр АР80 имеет следующие технические характеристики: осевая чувствительность (2 пКл/g*1), относительная поперечная чувствительность (5%), амплитудный диапазон (±2500 g*1), максимальный удар (пиковое значение - ± 5 000 g*1), частотный диапазон (0,5…20000 Гц), собственная частота в закрепленном состоянии (>55кГц), деформационная чувствительность (<0,005g·м/мкм).
Датчик силы 8200 обладает следующими техническими характеристиками: силовой диапазон (1000…5000 Н), линейность (<±1%), относительная поперечная чувствительность (5%), тензочувствительность (<0,04Н).
По приведенной выше методике были произведены экспериментальные исследования в лаборатории ЭНИМС на токарно-винторезном станке 16К20 совместно с кафедрой Станков. Экспериментальные результаты приведены на рис. 2, 3. Анализ результатов показал, что пики амплитуд колебаний шпинделя находятся на частотах 191Гц и 510Гц, что подтверждает теоретические расчеты. Так же были, выявлены погрешности и их возможные источники.
Погрешности динамических измерений обусловлены присутствием следующих составляющих
- вибрационные характеристики привода
- отклонения формы и расположения шпинделя
- вибрационные характеристики опор ШУ (подшипников):
1) собственные колебания подшипников,
2) колебания подшипников, установленных на шпинделе (качество установки подшипников на шпинделе, дефекты элементов подшипников) - погрешности от используемых в ИИС средств измерений - методическая погрешность - погрешность, связанная с оценкой частотных характеристик.
Таким образом, для получения достоверных результатов при вибродиагностике необходимо использовать средства измерения с определенными метрологическими характеристиками с учетом установленных составляющих погрешностей.
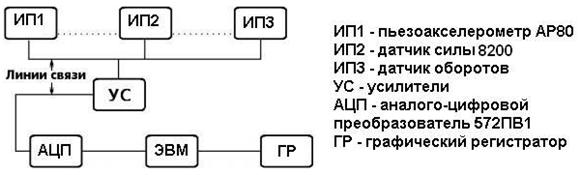
Рис. 1. Схема ИИС
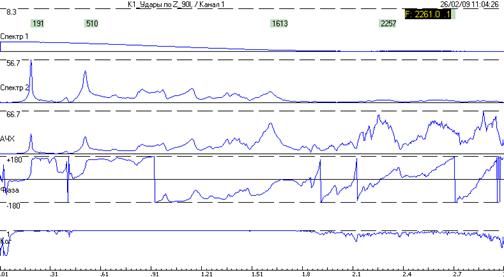
Рис. 2. Частотные характеристики ШУ по оси Z-Z
9 т. об. 9 т. об.
9 т. об. Ось Z.
Рис. 3. Спектры огибающей в октаве 4 кГц
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.15.
Измерительная информационная система для распознавания типов поверхностей
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – к. т.н., доц. , каф. «Измерительные информационные системы и технологии»
Москва 2010
Тема настоящей работы является крайне актуальной, так как информация о виде поверхности позволяет разработать алгоритм управления мобильными роботами, нашедшими активное применение в наши дни. В простейшем случае, ощупывание может быть использовано для обнаружения препятствий и идентификации поверхностей, свойств ландшафта и качества его покрытия (бетон, песок, лед и т. п.), поэтому целью данной работы является разработка информационно-измерительной системы для распознавания различных типов поверхностей.
Работа выполнялась на кафедре «Измерительные информационные системы и технологии» совместно с кафедрой «Робототехнические и мехатронные системы».
Для достижения данной цели была поставлена задача: разработка измерительной системы, которая будет изготовлена и установлена на мобильных роботах, а полученная информация будет использоваться для разработки алгоритма управления роботом. Поэтому был проведен обзор и анализ информации о подобных исследованиях в отечественных и зарубежных источниках. Так, например, Philippe Giguere и Gregory Dudek предлагают использовать для данной цели измерительную информационную систему (ИИС) на основе датчиков вибрации.
Для создания ИИС необходимо разработать ее блок-схему, выбрать элементы, входящие в эту систему, например, датчики, микроконтроллеры; на основе анализа их технических и метрологических характеристик, смонтировать ИИС, установить программно-математическое обеспечение, а затем откалибровать установку и потом провести экспериментальные исследования с последующей обработкой и анализом результатов.
Мобильный робот, перемещаясь по исследуемому объекту, например, мощеной дороге, будет воспринимать колебания ее поверхности, следовательно, необходимо оценить эти колебания, поэтому в качестве чувствительного элемента был выбран акселерометр, т. е. средство измерения ускорения, которое является одним из параметров, используемых для контроля вибраций.
На первом этапе была составлена структурная схема измерительной системы, которая представлена на рис. 1. Информация с исследуемого объекта поступает на вход датчика-акселерометра, где преобразуется в соответствующие напряжения на выходе, пропорциональные смещению по осям акселерометра, затем усиливается и поступает на микроконтроллер для последующей обработки и передачи ее результатов на ПК. Таким образом, величина колебаний измеряемого объекта, совершаемых им при перемещении вместе с установленной на нем измерительной системой, позволяет произвести оценку типа поверхности, по которой он перемещается. Спектр сигнала, поступающего с акселерометра, дает возможность оценить и определить тип поверхности.
 магистрской работе\Блок-схема 1.bmp" width="540" height="94" class=""/>
магистрской работе\Блок-схема 1.bmp" width="540" height="94" class=""/>
Д – акселерометр, МК – плата с микроконтроллером, К – компьютер мобильного робота
Рис. 1 Структурная схема установки
Далее был произведен анализ существующих разновидностей акселерометров и микроконтроллеров, в результате которого был выбран акселерометр ADXL202E и отладочная плата микроконтроллера фирмы Atmel AT89C5131А. Данные компоненты были приобретены и смонтированы соответствующим образом и откалиброваны.
Выбор данного акселерометра, как измерительного устройства, был обусловлен предъявляемыми к нему требованиями в отношении диапазона измерения и типов поверхностей, для которых планировалось проведение экспериментальных исследований (бетонный пол, асфальт, кафельная плитка, паркет, линолеум и т. д.). Априорно известно, что для исследования поверхностей типа гравий, песок, наилучшие результаты были получены при использовании акселерометров 2-3g. Поэтому, в данной работе был выбран акселерометр со встроенным предусилителем и со следующими основными характеристиками:
· датчик ускорения по 2 осям на одном чипе,
· диапазон измерения 2mg при 60 Гц,
· низкое энергопотребление < 0,6 мА,
· шок-защита до 1000g.
Отладочная плата микроконтроллера фирмы Atmel AT89C5131А была выбрана по следующим причинам:
· возможность обмена данными через USB-интерфейс,
· малые габаритные размеры;
· наличие ЖК-дисплея для непосредственного наблюдения и возможности снятия показаний напрямую.
Таким образом, в настоящей работе была разработана ИИС для контроля и идентификации поверхностей и проведены экспериментальные исследования по измерению вибрационных процессов. При таких колебаниях, на дисплее ИИС наблюдаются изменения координат ускорений по осям Х и Y. В дальнейшем планируется установка данной ИИС на мобильном роботе с целью идентификации поверхности, по которой он будет перемещаться.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.16.
ПРИБОРА ДЛЯ КОНТРОЛЯ В ВОЗДУШНОЙ СМЕСИ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – преп. каф. «Измерительные информационные системы и технологии»,
Москва 2010
Сегодня важность контроля состава газовых смесей не вызывает сомнений, поскольку она напрямую связана с основными проблемами современной цивилизации: экономией энергии, сырья, контролем качества, оптимизацией промышленных процессов, охраной окружающей среды, совершенствованием медико-биологических методов и т. д.
Для начала следует провести обзор существующих датчиков, предназначенных для определения химического состава газовой смеси. Наиболее популярными и востребованными сегодня являются:
· электрохимические датчики на основе твердых электролитов;
· катарометры;
· парамагнитные датчики;
· оптические датчики
· электрические датчики
Электрохимические датчики на основе твердых электролитов можно схематически представить в виде концентрационного элемента. В идеальном случае этот элемент создает разность потенциалов, или ЭДС, подчиняющуюся закону Нернста. Зная температуру и парциальное давление вблизи электрода сравнения, можно найти неизвестное парциальное давление кислорода из измерения величины ЭДС, составляющей обычно от нескольких десятков до сотен милливольт.
Принцип работы катарометров основан на том, что удельные теплопроводности газов существенно различаются друг от друга. С другой стороны, зависимость теплопроводности бинарных смесей от их состава часто имеет линейный характер. Таким образом, метод количественного определения состава заключается в сопоставлении теплопроводностей анализируемых смесей с соответствующими значениями для газа сравнения.
В парамагнитных датчиках на газ, помещенный в поле с градиентом магнитной индукции, действует сила, параллельная полю, направление и величина которой зависят от магнитной восприимчивости газа. При помещении газовой смеси в магнитное поле оно оказывает воздействие практически только на парамагнитные газы.
В оптических датчиках производится поглощение видимого, ультрафиолетового и рентгеновского излучений, а также инфракрасного излучения, что приводит к изменению оптических свойств среды. Измерение интенсивности электромагнитного излучения, поглощаемого газовой смесью, зависит от природы газа и позволяет, таким образом, определить концентрацию данного газа в смеси.
Электрический датчик, а именно такой тип датчика использовался в данной работе, основан на изменении электропроводности полупроводниковой пленки вследствие адсорбции газа на ее поверхности. На трубчатую подложку из оксида алюминия (Рис. 1) нанесен тонкий слой оксида олова (SnO2), легированного элементами, обладающими каталитическими свойствами (Pt, Cu, Ni, Pd), чтобы обеспечить более высокую чувствительность полупроводника к конкретному типу газа примеси.
|
|
|
Рис. 1 – Схема датчика на основе оксида олова 1 – керамическая трубка держателя; 2 – резистивный нагреватель; 3 – электрод; 4 – зажимы; 5 – легированный оксид олова |
При нагреве сенсора до рабочей температуры (ок. 400°С) при помощи нагревательного элемента, выполненного в конструктиве с датчиком, происходит адсорбция содержащегося в воздухе кислорода на поверхность сенсора, имеющую мелкозернистую структуру. Протекание адсорбции зависит от концентрации газа примеси. В результате поверхностных эффектов изменяется электрическая проводимость сенсора. Отклик датчика выражается через изменение его сопротивления в зависимости от концентрации газа, изменяющего адсорбцию кислорода на материале сенсора. Быстрота отклика зависит от модели датчика и конкретного газа примеси.
Датчик проявляет чувствительность к различным типам газов примеси одновременно, но оптимальная селективность к определенному типу обеспечивается, во-первых, путем ввода специальных легирующих добавок в оксид олова на этапе изготовления и, во-вторых, выбором рабочей температуры сенсора, что достигается подачей на нагревательный элемент определенного постоянного напряжения.
Датчик, производства японской компании Figaro Engineering Inc., использованный в данной работе, способен определять концентрацию различных горючих газов: пропан, метан, горючая смесь природных газов и т. п.
В данной работе был создан макет, позволяющий фиксировать концентрацию паров этанола. Тем самым был реализован так называемый алкотестер.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.17.
ОЦЕНКА ПОГРЕШНОСТИ МЕТОДА НАНОИНДЕНТИРОВАНИЯ ПРИ ОПРЕДЕЛЕНИИ МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – д. т.н., проф. , каф. «Измерительные информационные системы и технологии»
Москва 2010
На сегодняшний день, в связи с уменьшением характерных размеров различных элементов электромеханической техники, стал актуален вопрос определения физико-механических свойств материалов данных элементов на микро - и наноуровне. Для оценки механических свойств объектов применяют приборы, реализующие концепцию наноиндентирования, что позволяет оценивать различные количественные характеристики материала на наноуровне путем снятия кривой «нагружение – внедрение».
Однако точность получаемых результатов во многом определяется размерными эффектами. Поэтому для ее оценки необходимо составить такую модель, которая позволяла бы определять необходимые параметры в зависимости от размеров исследуемого образца.
В данной работе исследуется методика нахождения метрологических характеристик для результатов измерения твердости материала, получаемых в соответствии с методом Оливера - Фара (рис.1).
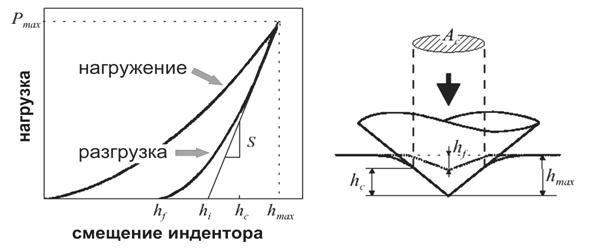 |
Рис. 1. Метод Оливера - Фара. Кривая «нагружение – внедрение».
Как известно, твердость материала определяется по формуле:
![]()
где ![]() - нагрузка, прикладываемая к образцу,
- нагрузка, прикладываемая к образцу,
![]() - площадь проекции отпечатка при максимальном значении приложенной нагрузки.
- площадь проекции отпечатка при максимальном значении приложенной нагрузки.
Каждый компонент данной формулы вносит свой вклад в суммарную погрешность определения твердости. Однако погрешность определения площади отпечатка ![]() значительно выше, так как она зависит от целого ряда факторов, в то время как погрешность определения нагрузки может быть задана лишь своим паспортным значением. Возможные источники погрешности в определении площади проекции отпечатка будут складываться из следующих составляющих:
значительно выше, так как она зависит от целого ряда факторов, в то время как погрешность определения нагрузки может быть задана лишь своим паспортным значением. Возможные источники погрешности в определении площади проекции отпечатка будут складываться из следующих составляющих:
· способ определения функции формы иглы;
· определение наибольшей глубины внедрения индентора в поверхность;
· наличие «навалов», «провалов» на границах отпечатка при деформации поверхности.
Рассмотрим их более подробно. Как известно, существует три способа нахождения функции формы иглы. Оценивая каждый из них, можно прийти к выводу, что прямой способ нахождения функции формы индентора (с помощью атомно-силового микроскопа) является наиболее приемлемым и включает в себя следующие составляющие погрешности: паспортные данные погрешности измерений по осям X/Y/Z, погрешность шага сканирования и погрешность, определяемая пятном контакта зонда с образцом.
Однако, имея функцию формы иглы, необходимо помнить, что глубина внедрения индентора в образец определяет значение этой функции для конкретного укола. В свою очередь параметр ![]() вычисляется по формуле:
вычисляется по формуле:
![]()
где ![]() – глубина невосстановливаемого отпечатка при максимальной нагрузке,
– глубина невосстановливаемого отпечатка при максимальной нагрузке,
![]() – расстояние, соответствующее пересечению касательной к кривой разгружения (рис. 1),
– расстояние, соответствующее пересечению касательной к кривой разгружения (рис. 1),
![]() - константа, зависящая и геометрии индентора (
- константа, зависящая и геометрии индентора ( для пирамиды Берковича).
для пирамиды Берковича).
Оценивая эту зависимость, приходим к выводу, что погрешность нахождения глубины внедрения ![]() является сложной функцией нагрузки и измеренной глубины отпечатка, а также и аппаратной погрешности. Так на малых глубинах внедрения индентора в материал (до 100 нм) погрешность определения твердости составит порядка 30-40%, тогда как в остальных случаях 10-15%.
является сложной функцией нагрузки и измеренной глубины отпечатка, а также и аппаратной погрешности. Так на малых глубинах внедрения индентора в материал (до 100 нм) погрешность определения твердости составит порядка 30-40%, тогда как в остальных случаях 10-15%.
Таким образом, погрешность определения твердости методом наноиндентирования должна определяться как функция нагрузки и глубины внедрения. Рассчитывая ее таким способом, можно судить о приемлемости метода в каждом конкретном случае в условиях, заданных особенностями конкретных исследуемых материалов.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.18.
РАЗРАБОТКА ПРИБОРА КОНТРОЛЯ АМПЛИТУДНЫХ ПАРАМЕТРОВ ИЗЛУЧЕНИЯ ВИДИМОЙ ЧАСТИ СПЕКТРА
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – преп. каф. «Измерительные информационные системы и технологии»,
Москва 2010
В настоящее время измерение уровня освещенности находит применение в различных сферах деятельности человека. Особое значение данный процесс принимает в организации оптимальных условий труда на предприятиях, в приборостроении, машиностроении и т. д.
Из всех фотометрических приборов, люксметры являются наиболее простыми. Ими контролируется уровень освещенности в здании, на улице, при проведении измерений и т. д. Чаще всего они состоят из фотоэлемента и чувствительного электроизмерительного прибора. Для достоверности показаний необходимо, чтобы спектральная чувствительность фотоприемника соответствовала чувствительности человеческого глаза.
Самым простым датчиком, применяемым в люксметре, является фотодиод. При воздействии излучения соответствующей частоты на прямо смещенный p-n переход, через фотодиод возникает ток, незначительный по сравнению с темновым током. При обратном смещении p-n перехода ток возрастает очень сильно. Электроны начинают сталкиваться, что приводит к образованию пар электрон-дырка на обоих концах перехода. Электроны, попавшие в зону проводимости, начинают лететь в сторону положительного полюса батареи, а поток дырок – к отрицательному. Таким образом, в цепи фотодиода возникает ток ip. Ток утечки i0 в темноте не зависит от приложенного напряжения, а возникает он вследствие тепловой генерации носителей зарядов.
Еще одним оптическим датчиком является фототранзистор, который помимо фотоэлектрического преобразования выполняет функцию усиления тока, тем самым, повышая чувствительность детектора. При включении фототранзистора в схему с источником питания, внутри контура, в состав которого входит переход база-эмиттер, начинает течь фотоиндуцированный ток. Усиление тока в фототранзисторе происходит аналогично биполярному транзистору, в результате чего коллекторный ток значительно возрастает. Фотоиндуцированный ток базы возвращается на коллектор через эмиттер и внешнюю часть схемы. Электроны, попадающие в базовую область со стороны эмиттера, выталкиваются в зону коллектора электрическим полем. Чувствительность фототранзистора зависит от эффективности работы перехода база-коллектор и коэффициента усиления по постоянному току фототранзистора, т. е. чувствительность фототранзистора является функцией коллекторного тока.
Еще одним фотопроводящим устройством, используемым в люксметре, является фоторезистор (Рис. 1). Для его изготовления чаще всего применяется сульфид кадмия (CdS) и селенид кадмия (CdSe). Эти материалы являются полупроводниками, которые изменяют свое сопротивление при попадании света на их поверхность. Фоторезисторы необходимо подключать к источникам питания.
На поверхности двух противоположных концов фотопроводника нанесены электроды. Сопротивление такого элемента в темноте очень велико. Если подключить к нему источник напряжения V, то темновой ток в цепи будет очень низким. При попадании на поверхность фоторезистора света, в цепи потечет ток ip. Под зоной проводимости кристалла находится донорный уровень, а над валентной зоной находится акцепторный уровень. В темноте эти уровни заполнены электронами и дырками, что объясняет высокое сопротивление полупроводникового кристалла. При освещении фотопроводящего кристалла его материал поглощает летящие фотоны. В результате увеличивается энергия электронов валентной зоны, что позволяет им переместиться в зону проводимости. При этом в валентной зоне остаются свободные дырки. Именно этим и объясняется увеличение удельной проводимости материала.
|
|
|
Рис. 1 – Структура фоторезистора |
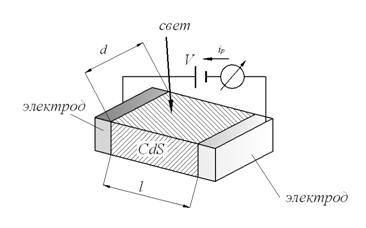
Для улучшения чувствительности фоторезистора и уменьшения сопротивления резистивного элемента расстояние l между электродами необходимо уменьшать, а ширину детектора d – увеличивать. Поэтому детектор следует делать очень коротким и широким. С этой целью ему часто придают форму серпантина. Сопротивление фоторезистора в темноте очень велико, что приводит к снижению темнового тока. Соответственно, температурная составляющая погрешности будет минимальна. Фоторезистор наименее всего подвержен к воздействию внешних шумов. Так же фоторезистор является очень чувствительным детектором, работающим как фотоумножитель.
Руководствуясь этими преимуществами фоторезистора, для создания макета измерительной установки автор выбрал фоторезистор российской компании «Алмаз» модель ФР-765. Разработанный прибор может быть применен при измерении уровня освещенности, а также для решения ряда родственных прикладных задач.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.19.
ПОСТРОЕНИЕ СИМУЛЯТОРА КИМ В BLENDER
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – д. т.н., проф. , каф. «Измерительные информационные системы и технологии»
Москва 2010
Современное производство невозможно представить без применения CAD/CAM/CAE систем. Это ускоряет процесс разработки и производства продукции. Но на современном этапе развития производства этого уже недостаточно. Для того, чтобы избежать порчи и простоя дорогостоящего оборудования, применяют различные симуляторы — программные и аппаратные средства, создающие впечатление действительности, отображая часть реальных явлений и свойств в виртуальной среде.
Симуляторы уже многие годы широко используются для обучения пилотов, машинистов электропоездов и др. Основным принципом симулятора является точное воспроизведение особенностей какой-то тематической области.
Для создания и отладки программ ЧПУ существуют различные симуляторы. Хорошим функционалом отличается программа VERICUT. VERICUT выполняет имитацию обработки на станках с ЧПУ с целью обнаружения ошибок в траектории режущего инструмента и неэффективных проходов. В ней можно построить модель любого станка и моделировать обработку на компьютере. Объемная модель заготовки и станка с ЧПУ позволяет увидеть весь процесс обработки детали в том виде, в каком можно увидеть на реальном станке.
Контроль качества производимой продукции не должен отставать от процессов разработки и производства. Разработка и отладка программ измерения на КИМ должна вестись параллельно разработке и отладке программ управления ЧПУ с момента получения 3d-модели проектируемой детали.
Богатым функционалом обладает программа SoftMachine. С помощью SoftMachine можно визуализировать в реальном времени весь процесс контроля параметров деталей, протестировать программы измерений, выявить ошибки и сократить затраты времени на отладку измерений на реальном оборудовании. Программа содержит богатую библиотеку кинематических моделей КИМ ведущих производителей. Основным недостатком данной программы является её цена - коммерческая лицензия базовой версии стоит около 55000 $, версия для университетов — 25000 $.
Не каждый российский университет может позволить себе такое приобретение. Поэтому для обучения студентов работе с КИМ создаётся симулятор, имеющий схожую функциональность. В качестве 3-d движка выбрана свободная программа blender. Основными достоинствами данной программы являются:
· поддержка разнообразных геометрических примитивов, включая полигональные модели, систему быстрого моделирования, кривые Безье;
· импорт 3-d моделей деталей, созданных в различных Cad-системах;
· доступность исходных кодов программы;
· инструменты анимации, среди которых инверсная кинематика, скелетная анимация и сеточная деформация, нелинейная анимация, ограничители, динамика мягких тел (включая определение коллизий объектов при взаимодействии), динамика твёрдых тел на основе физического движка;
· встроенный ООЯП python используется как средство создания инструментов и прототипов, системы логики в играх, как средство импорта/экспорта файлов, автоматизации задач;
· Game Blender (GE), предоставляющий интерактивные функции, такие как определение коллизий, движок динамики и программируемая логика.
Основные требования к симулятору КИМ: ознакомление с принципом координатных измерений, отработка программ измерения, измерение параметров корпусных деталей, эмуляция погрешностей КИМ. На данном этапе эмуляция кинематики КИМ не требуется.
Этапы создания виртуальной КИМ:
1. Импорт 3d-модели измеряемой детали,
2. Масштабирование модели, учёт коэффициента масштаба в программе измерения,
3. Создание измерительного наконечника (ИН) требуемого диаметра,
4. Создание базовых функций автоматического измерения (перемещение и съём координат вдоль координатных осей, измерение координат точек отверстий, преобразование координат, прочее),
5. Перевод словесного описания измерения параметров модели в цепочку базовых функций.
Полученная модель виртуальной КИМ позволяет производить измерение параметров моделей в ручном режиме, отлаживать программы измерений, проводить измерения параметров простых корпусных деталей с помощью базовых функций, расширять набор базовых функций, обрабатывать полученные результаты (расчёт размеров, отклонений формы и расположения) как с помощью модулей python, так и с помощью специальных математических пакетов (mathcad, scilab, octave).
Уже полностью написана функция для измерения координат точек отверстия. Её формат circle(x, y,z, R,n, flag). Где x, y,z — координаты номинального центра отверстия, R — номинальный радиус, n — количество точек, координаты которых надо измерить, flag — режим работы функции (плоскость, перпендикулярная оси отверстия; сечения, в которых производится съём координат).
Большим недостатком blender является скудность документации и некоторые проблемы с точностью определения касания ИН и модели. Но наличие исходных кодов в перспективе позволяет решить эту проблему при содействии специалистов в области машинной графики.
Некоммерческая организация «Ассоциация московских вузов»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный технологический университет «Станкин »
Научно-информационный материал
Подраздел: 40.7.2.5.
НИМ 2.5.20.
ПРИМЕНЕНИЕ ХАОСА ДЛЯ ОБЕСПЕЧЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ПЕРЕДАЧИ МОДУЛИРОВАННЫХ СИГНАЛОВ
– каф. «Измерительные информационные системы и технологии»
Научный руководитель – д. т.н., проф. , каф. «Измерительные информационные системы и технологии»
Москва 2010
Динамический (детерминированный) хаос – явление в теории динамических систем, представляющее собой акт возникновения сложных непериодических квазислучайных колебаний.
Большинство исследованных аттракторов отличаются тем, что генерируемые ими хаотические колебания являются относительно низкочастотными. Однако некоторые из них, такие как аттрактор Хеннона, имеют широкий диапазон частот и поэтому могут использоваться в качестве носителя при модуляции и широкополосной передаче измерительных сигналов.
Аттрактор Хеннона описывается нелинейным уравнением
![]()
При значениях параметров, равных ![]() .
.
На рис.1 представлен отрезок сигнала и развернутый во времени (вертикальная ось) фазовый портрет, соответствующий аттрактору Хеннона. Явно видно, что спираль аттрактора развивается во времени случайным образом, не поддающимся наглядному описанию.
 |
Рис.1. Фрагмент сигнала и фазовый портрет
Предлагается система передачи сигналов, в которой используется генератор на базе аттрактора Хеннона, включающий в себя цифровой полосовой БИХ-фильтр для задания границ частотного диапазона и аналоговый фильтра нижних частот для восстановления аналогового сигнала.
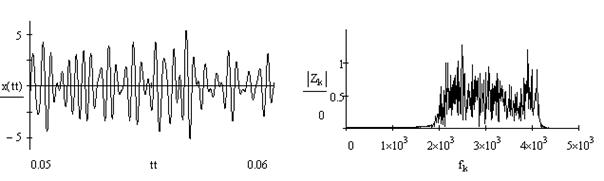
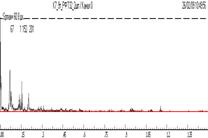
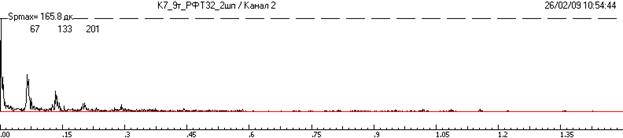
Рис.2. Фрагмент сигнала - носителя и его амплитудный спектр
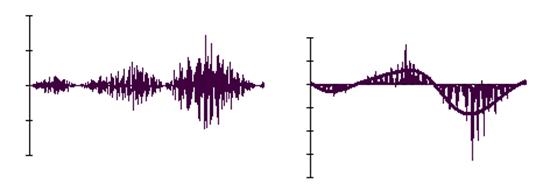
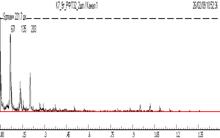
Сигнал на выходе генератора, фрагмент которого вместе с амплитудным спектром представлен на рис. 2 используется в качестве носителя в схеме амплитудной модуляции с подавленной несущей. В результате получается амплитудно-модулированный хаосом сигнал, фрагмент которого изображен на рис. 3
Рис. 3. Фрагмент амплитудно-модулированного хаосом
и демодулированного сигналов
Демодуляция АМ-сигнала производилась с помощью алгоритма синхронного детектирования. Первым шагом является перемножение модулированного и хаотического сигналов, вторым шагом – низкочастотная фильтрация с помощью фильтра Баттерворда нижних частот. В итоге получаем информационный сигнал, представленный сплошной линией на рис. 3 на фоне фильтруемого сигнала.
Размазанность спектра фильтруемого сигнала по оси частот приводит к тому, что становится необходимым тщательный выбор частоты среза фильтра.
Моделирование и исследование схемы генерации хаотического носителя, модуляции хаосом и демодуляции сигнала была реализована в программном комплексе MathCad, блочная реализация была отработана средствами Simulink.

|
Из за большого объема эта статья размещена на нескольких страницах:
1 2 3 4 5 |
