

где 
Переменными состояниями являются Uc, iL1, iL2, а задающим воздействием является Uвх=U(t). Низкочастотные параметры транзистора r11, r12, r21, r22 определены для схемы с ОЭ.
6.3. Топологические (графические, структурные) модели систем
Структурные схемы и графы как модели систем являются графической интерпретацией диф уравнений и используются для наглядного изображения алгоритма функционирования ОУ, а также для обнаружения некоторых закономерностей. Наиболее часто структурные схемы используются при анализе и синтезе детерминированных систем. Рассмотрим примеры скалярных и векторных структурных схем по заданным аналитическим моделям систем.
А) скалярные структурные схемы детерминированных непрерывных систем.
1) пусть векторы ![]() и
и  в векторном уравнении динамической системы (иначе называется уравнением состояний)
в векторном уравнении динамической системы (иначе называется уравнением состояний)  имеют размерность два, т. е.
имеют размерность два, т. е. ![]() :
:
 ,
, 
|
|
|
|

В этом случае векторное дифференциальное уравнение ![]() эквивалентно двум скалярным уравнениям первого порядка:
эквивалентно двум скалярным уравнениям первого порядка:
 (*)
(*)
Обобщенная структурная схема, соответствующая (*), имеет вид:
2) Для конкретных выражений функций ![]() и
и ![]() имеем конкретную структурную схему. Пусть аналитическая модель линейной СУ (т. е. системы, описанной линейным дифференциальным уравнением) второго порядка (
имеем конкретную структурную схему. Пусть аналитическая модель линейной СУ (т. е. системы, описанной линейным дифференциальным уравнением) второго порядка (![]() ) с двумя входами (
) с двумя входами (![]() ) имеет вид:
) имеет вид:
этой символической модели соответствует следующая структурная схема в пространстве состояний:
 |
На этой схеме прямоугольники означают звенья системы, а кружочки с секторами – сумматоры, а дуги, совпадающие с направлением дуг входных сигналов ![]() и
и ![]() , являются каналами прямой связи, дуги, имеющие направление, противоположное направлению дуг входных сигналов
, являются каналами прямой связи, дуги, имеющие направление, противоположное направлению дуг входных сигналов ![]() и
и ![]() , имитируют местные ОС.
, имитируют местные ОС.
3) Графической моделью в пространстве выходных (фазовых) координат (переменных, параметров) линейной системы ![]() , где
, где ![]() и
и ![]() - дифференциальные операторы (т. е. полиномы относительно оператора дифференцирования по времени
- дифференциальные операторы (т. е. полиномы относительно оператора дифференцирования по времени ![]() ) является схема:
) является схема:
Б) векторная структура схемы многомерных детерминированных непрерывных систем.
1) Пусть динамическая система описывается векторным уравнением вида:
![]()
Соответствующая структурная схема изучаемой системы имеет вид:
 |
Здесь: ![]()
![]()
![]() ,
,![]() - векторы.
- векторы.
![]() – единичная матрица.
– единичная матрица.
2)Пусть линейная многомерная система описывается векторным дифференциальным уравнением состояния:
Этому уравнению в пространстве состояний соответствует структурная схема:
 |
3)Пусть непрерывная детерминированная система уравнений задана уравнениями состояний и выходов в векторном виде:
![]()

![]()
Здесь все переменные  и
и ![]()
![]() являются многомерными векторами.
являются многомерными векторами.
![]() –вектор фазовых координат ( или вектор измерений ),
–вектор фазовых координат ( или вектор измерений ),
![]() –вектор возмущений,
–вектор возмущений,
![]() вектор ошибок наблюдения,
вектор ошибок наблюдения,
![]() –вектор управляющий воздействием,
–вектор управляющий воздействием,
![]() –вектор состояний системы.
–вектор состояний системы.
 -соответствующая матрица системы, выхода, входа.
-соответствующая матрица системы, выхода, входа.
Структурная схема ,соответствующая системе из двух векторных уравнений имеет вид :
В) Топологические схемы дискретных детерминированных систем.![]()
1) Пусть аналитическая модель дискретной системы (в этой СУ либо ОУ по своей природе являются дискретными, либо УС является дискретной, либо ОУ и УС - дискретные) по времени описывается векторным разностным уравнением вида:
![]() )=
)=
Соответствующая структурная схема имеет вид:
Здесь: ![]() -оператор задержки на один шаг (интервал). Этот оператор соответствует оператору интегрирования
-оператор задержки на один шаг (интервал). Этот оператор соответствует оператору интегрирования ![]() в непрерывной системе.
в непрерывной системе.
2), дискретная во времени, описывается символической моделью в виде векторного разностного уравнения состояния:
Имеем следующую топологическую модель:
 |
Замечание:
1.Матричное уравнение ![]() можно рассматривать как выходные сигналы датчика, дающего численную оценку переменных состояний
можно рассматривать как выходные сигналы датчика, дающего численную оценку переменных состояний ![]() .
.
2.Другие центральные детерминированные системы могут в каждый момент времени 
![]()
![]()

6.3. Задачи
1. Составить структурные схемы (скалярные и векторные) управления кораблей по углу рысканья
при следующих допущениях:
-осевая (диаметричная) линия корабля под действием порывистого ветра отклоняется от заданного курса (направления) на угол ![]() ( угол рысканья), а возвращение корабля на заданный курс осуществляется с помощью руля, отклонение которого равно
( угол рысканья), а возвращение корабля на заданный курс осуществляется с помощью руля, отклонение которого равно ![]() .
.
Предполагается также, что относительно вертикальной оси,
проходящей через центр тяжести корабля, последний имеет момент инерции ![]()
![]() , а восстанавливающий момент руля
, а восстанавливающий момент руля ![]()
![]()
пропорционален углу отклонения руля ![]() .
.
Решение:
Аналитическая модель САУ движение корабля по курсу может быть получена на основании закона Ньютона для вращающегося тела:
![]()
![]() , (1) , где
, (1) , где ![]() , (2)
, (2)
(2)![]() (1):
(1): ![]()
![]() (3)
(3)
Здесь ![]() -момент, вызванный порывами ветра.
-момент, вызванный порывами ветра.
Разделив в (3) левую и правую части на ![]() , имеем :
, имеем :
![]() (4)
(4)
или введём обозначения ![]()
![]() , имеем :
, имеем : ![]()
Принимая ![]() за управляющее воздействие, получаем:
за управляющее воздействие, получаем:
![]()
![]() (5)
(5)
Сведём (5) к системе 2-х дифференциальных уравнений первого порядка. Для этого введём в рассмотрение переменные состояния объекта управления (корабля):

Очевидно : ![]()
В этом случае дифференциальное уравнение 2-го порядка (5) переписывается в виде:
![]()
![]() (6)
(6)
или в матричной форме:
![]()
В векторной форме (6) запишется в виде:
 (7),
(7),
где ![]() ,
,
![]() ,
,  ,
, ![]() ,
, 
![]()
2. Построить структурную схему пассивного интегро - дифференцирующего звена, работающего на делитель с высокоомным входом.
Аналитическая модель:
Структурная схема:
7. Линейные системы управления.
- СУ, описание которых возможно с привлечением суперпозиций (наложения, адитивности, сепарабельности).
В ТУ для описания линейных САУ используется аппарат диф уравнений, передаточных функций, частотных и временных характеристик.
7.1. Принцип суперпозиции
В ТУ этот принцип формулируется следующим образом: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности.
![]()
где, х - вектор состояний, с- скаляр, L - линейный оператор.
7.2. Описание СУ линейными дифференциальными и алгебраическими уравнениями.
В ТУ для описания линейных систем используются как векторная(матричная), так и скалярная системы дифференциальных уравнений.
1) векторная запись уравнений состояний в нормальной форме и уравнение наблюдений имеет вид:
 (*)
(*)
![]() В этой системе A, B,C, D – соответственно матрица системы, матрица управления, матрица выхода, матрица входа.
В этой системе A, B,C, D – соответственно матрица системы, матрица управления, матрица выхода, матрица входа.
![]()
![]() - вектор состояний
- вектор состояний
![]()
![]() - вектор наблюдений
- вектор наблюдений
![]()
![]() - вектор входных воздействий/управления
- вектор входных воздействий/управления
![]()

![]()
|
Замечание:
В матричной записи приведено уравнение состояний.
 ,
,  – вектор возмущений
– вектор возмущений
![]() =
= ·
·![]() +
+ ·
·![]() +
+ ·
·![]()
Скалярная запись уравнения (*),эквивалентная приведенным векторным уравнениям, имеет вид:


Замечание:
· В математических моделях линейных стационарных систем уравнений элементы всех матриц A, B,C, D (т. е. полиномиальные коэффициенты a, b,c, d) выражают постоянными числами, хотя эти числа являются функциями параметров САУ.
· В линейных нестационарных математических моделях (параметрических) элементы матриц A, B,C, D могут зависеть от времени. В этом случае пишут:

2) Дифференциальные уравнения в классической форме записи имеют вид:
![]()
7.3 Описание линейных стационарных систем уравнениями с передаточными функциями.
Передаточная функция линейной системы – относительное изображение по Лапласу выходного и входного сигнала с нулевыми начальными условиями

Передаточная функция представляет собой дробно-рациональную функцию комплексной переменной P.
 (*)
(*)
![]() -вещественные постоянные
-вещественные постоянные
![]() -неотрицательные целые числа, называемые числом нулей(m) передаточной функции и числом полюсов (n).
-неотрицательные целые числа, называемые числом нулей(m) передаточной функции и числом полюсов (n).
Замечание:
· В ТУ соотношение (*) изображают в виде прямоугольника
|

![]()
· Преобразование импульсной переходной функции (т. е. реакция динамической системы на воздействие δ-функции Дирака) является передаточной функцией этой системы.

![]()
![]()
![]()
|

![]() x
x
Пример: пусть система представлена обыкновенным дифференциальным уравнением с постоянными коэффициентами.
![]() (*)
(*)
где ![]() , то
, то 
![]() -полиномиальные коэффициенты.
-полиномиальные коэффициенты.
Замечание:
· Полученное выражение передаточной функции в символической (операторной) форме можно получить, используя операторную форму записи, заданную дифференциальным уравнением.
 , где
, где
 - собственный оператор системы
- собственный оператор системы
 - оператор управления
- оператор управления
В этом случае  передаточная функция системы допускает следующую интерпретацию: если выбрать управляющий (входной) сигнал в виде
передаточная функция системы допускает следующую интерпретацию: если выбрать управляющий (входной) сигнал в виде ![]() , где р -комплексное число такое, что собственный оператор
, где р -комплексное число такое, что собственный оператор  , то линейное неоднородное уравнение системы (*) имеет частное решение в виде:
, то линейное неоднородное уравнение системы (*) имеет частное решение в виде:

|

![]()
Пример: Пусть математическая модель системы есть линейно-дифференциальное уравнение с постоянными коэффициентами следующего вида:
 , где
, где ![]()
В этом случае, переписав уравнение в операторной (алгебраизированной) форме, имеем:
 , где
, где
 - передаточная функция по управлению
- передаточная функция по управлению
 - передаточная функция по возмущению
- передаточная функция по возмущению
Замечание:
· Передаточная функция системы не зависит от характера приложенных воздействий, а определяется лишь параметрами и структурой самой системы и дает тем самым её динамическую характеристику.
· Если начальные значения исследуемой динамической системы не нулевые, то для её математического описания нельзя использовать передаточные функции.
Сказанное поясним для двух систем, описываемых следующими уравнениями:
![]() (1)
(1)
![]() (2)
(2)
Первая модель –дифференциальное уравнение 2-го порядка.
Чисто механически имеем операторное значение:
![]() (3)-для (1)
(3)-для (1)
![]() (4)-для (2)
(4)-для (2)
Перепишем (3) и (4) в виде:
![]() (5)
(5)
![]() (6)
(6)
Пусть входное воздействие u=t изменяется во времени по прямому закону. В этом случае решением дифференциального уравнения является:
Для (1) ![]() (7)
(7)
Для (2) ![]() (8)
(8)
![]() находят из начальных условий.
находят из начальных условий.
Эти два решения (7) и (8) совпадают только при нулевых начальных условиях.
![]()
Если ![]() , то имеем из (7):
, то имеем из (7):
(9) ![]()
Дифференцируя (7) имеем:
![]() (10)
(10)
![]() (11)
(11)
Из (9) и (11) следует, что 
Для первой динамической системы окончательное решение имеет вид:
![]() (12)
(12)
Аналогично, решением второй системы будет:  (13)
(13)
При других ( не нулевых) начальных условиях решения (1) и (2) не совпадают. Именно поэтому отношение (5) не может служить описанием первой системы, т. е. на самом деле имеем:
![]()
Пояснение:
· Собственный оператор Q(p) и оператор управления R(p) имеют общий множии при вычислении передаточной функции они сокращаются. Очевидно, что по полученной передаточной функции восстановить аналитическое описание первой системы не возможно. Эта передаточная функция соответствует только дифференциальному уравнению второй системы.
Замечание:
· Понятие передаточной функции обобщается и на линейные модели других типов: векторную (матричную), включая нестационарные, дискретные, с распределенными параметрами.
Напоминание: система с распределенными параметрами
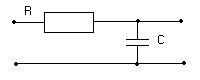
R - обладает как емкостью, так и индуктивностью, так и активным сопротивлением.
С – обладает активным сопротивлением, утечками и т. п.
Если система уравнений задана векторами состояния и наблюдения, то их преобразования Лапласа при нулевых начальных условиях:
(*)
V(p)- входное воздействие
(**)
Е - единичная матрица.
Подставляя первое уравнение системы во второе, имеем:
![]() или
или ![]()
W(p)- матрица передаточной функции
Элемент ![]() есть передаточная функция от входов и выходов, соответственно
есть передаточная функция от входов и выходов, соответственно ![]() и
и![]() , т. е.
, т. е.
|

|
![]()

Vm Ym
7.4 Частотные характеристики САУ
Частотные характеристики (ЧХ) – характеристики, получаемые при применении в преобразовании Фурье импульсной переходной функции ( импульсных характеристик).
y
![]()
![]()
![]()
x
![]()
|
 w(t)
w(t)
1) Описание линейных стационарных САУ ЧХ.
Линейную устойчивую систему можно определить как систему, для которой при подаче на вход гармонического сигнала (гармоники) ![]() , её установившаяся реакция в стационарном случае будет:
, её установившаяся реакция в стационарном случае будет:

|

![]()
Замечание:
Для нестационарной САУ соответствующая реакция 
Функция W(jω),которая получается из передаточной функции системы W(p)→W(jω) при замене в ней «р» на «jω» называется передаточной функцией или амплитудно-фазовой частотной характеристикой.
Пример:
Пусть передаточная функция системы имеет вид: 
Частотная передаточная функция будет иметь вид: ![]()
Примечание:
· В практике проектирование СУ часто используется вещественная и линейная ЧХ. Это означает, что: 
· При записи комплексной передаточной функции в виде ![]()
 -амплитудная ЧХ
-амплитудная ЧХ
![]() -фазовая ЧХ
-фазовая ЧХ
· Если ![]() , то угол
, то угол ![]()
· Применение на практике логарифмической ЧХ получается логарифмированием показательной частотной передаточной функции 
 .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
