

Принято величину ![]() как функцию переменной lgW называть логарифмической амплитудно-частотной функцией системы.
как функцию переменной lgW называть логарифмической амплитудно-частотной функцией системы.
Аналогично: ![]() называют логарифмической фазово-частотной характеристикой.
называют логарифмической фазово-частотной характеристикой.
Пример: рассмотрим описание следующей системы ЧХ
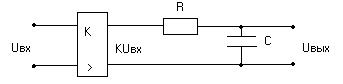 K=3 R=200кОм С=10мкФ
K=3 R=200кОм С=10мкФ
Составим дифференциальное уравнение с учетом, что ток RC-цепи есть :

По второму закону Ньютона имеем для выходной цепи:
 (*)
(*)
В алгебраизированной форме имеем:
 (**)
(**)
Здесь τ- произведение RC и называется постоянной времени переходного процесса в RC-цепи при ступенчатом входном воздействии.
Передаточная функция системы есть инерционное (апериодическое) звено.
 , К - коэффициент усиления.
, К - коэффициент усиления.
Соответственно частотная передаточная характеристика имеет вид:
![]()
![]()
![]()


![]()
![]()
Для графического представления частотных характеристик подставим в формулы исходные условия:
W(jw)=![]()
Вещественно-частотная характеристика
Мнимая частотная характеристика
Амплитудно-частотная характеристика
Фазово-частотная характеристика
д) Описание СЛАУ временными характеристиками
В настоящее время для описания САУ используются переходные и импульсно-переходные функции.
Переходной функцией (характеристикой) системы называется функция, описывающая реакцию (отклик) системы на функцию Хевисайда (единичное ступенчатое воздействие при нулевых начальных условиях):
Импульсно-переходной (весовой) функцией системы w(t) называется функция, описывающая реакцию системы на функцию Дирака при нулевых начальных условиях:
Примечание:
Связь между переходной и весовой функциями следующая:
Пример:
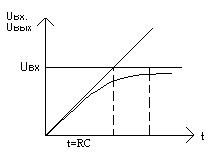
Определить h(t) и w(t) для апериодического звена и построить соответствующие характеристики.
Дифференциальное уравнение, соответствующее этому звену имеет воздействие
![]()
![]()
Начальные условия: Uвых(t=0)=0
Переходную функцию звена найдем, считая, что входная функция есть функция Хевисайда
![]()
Общее решение однородного дифференциального уравнения, соответствующего (**), имеет вид:
![]() (***)
(***)
Для нахождения реакции звена применим метод вариации постоянной
С1=С1(t)
Подставляем (***) в (**) и имеем
![]()
Отсюда
![]() (****)
(****)
Интегрируя, получим
![]()
Подставляя С1 в решение однородного уравнения, имеем
![]()
Найдем С2 из начальных условий
Uвых(t=0)=k+C2=0 C2= -k
Итак ![]()
Характеристика будет иметь следующий графический вид:
С учетом связи весовой характеристики с переходной, имеем следующую весовую функцию

Примечание:
Если ищется реакция линейной системы на произвольное входное воздействие (в примере функция Дирака и Хевисайда является типовым входным воздействием), то при известной весовой функции имеем:

y(t)- реакция системы
Этот, так называемый, интеграл - свертка (интегральное уравнение связи входа и выхода) справедлив при нулевых начальных условиях.
В этом преобразовании весовая функция есть ядро интегрального преобразования.
Элементарные звенья управления
Стационарными звеньями называются элементы систем управления, описываемые линейными дифференциальными или алгебраическими уравнениями, а также уравнениями с запаздывающими аргументами, если коэффициенты уравнений не изменяются во времени.
(А) Классификация звеньев по дифференциальным операторам.
Переходный процесс всякого элементарного звена может быть описан в общем случае дифференциальным уравнением в алгебраизированной форме.
![]()
или
Q(p)Y(t)=U(p)V(t)
Q(p), U(p) - выходной (собственный) и входной операторные полиномы звена.
V(t), Y(t) – входная и выходная функции звена.
· Классификация звеньев по выходному дифференциальному оператору Q(p)
рассматривает структуру звена с точки зрения его свободных колебаний без учета входных
воздействий.
Q(p)Y(t)=0
Такая классификация часто полезна при решении задач, касающихся устойчивости звена.
При этом конкретные значения и знаки полиномиальных коэффициентов позволяют
получить классификацию звеньев в виде следующих алгебраизированных уравнений:
![]() Звенья, операторы которых имеют положительный свободный член, равный 1, называются статическими.
Звенья, операторы которых имеют положительный свободный член, равный 1, называются статическими.
![]() Если свободный член в собственном операторе отсутствует, то звено называется астатическим.
Если свободный член в собственном операторе отсутствует, то звено называется астатическим.
![]() При отрицательном свободном члене, равном 1, звено классифицируется как звено, обладающее отрицательным статизмом.
При отрицательном свободном члене, равном 1, звено классифицируется как звено, обладающее отрицательным статизмом.
Звенья с выходным оператором  называются одно-емкостными. В отличие от звена, описываемого операторным полиномом
называются одно-емкостными. В отличие от звена, описываемого операторным полиномом ![]()
Этот факт следует из того, что если единственный корень характеристического уравнения собственного оператора отрицателен, то решение дифференциального уравнения первого порядка есть: ![]()
При положительном корне решение вида: ![]()
Звено с оператором ![]() является неустойчивым, т. к. может быть разложено на
является неустойчивым, т. к. может быть разложено на
два последовательно соединенных звена:

![]()
![]()
![]()


Q1(p) Q2(p) Q(p)=Q1(p)Q2(p)
Звено, у которого выходной оператор имеет вид  называется консервативным. Особенностью этого звена является то, что оно порождает при входных воздействиях незатухающие колебания, поскольку оба корня характеристического уравнения являются чисто мнимыми.
называется консервативным. Особенностью этого звена является то, что оно порождает при входных воздействиях незатухающие колебания, поскольку оба корня характеристического уравнения являются чисто мнимыми.
Звено, имеющее собственный оператор  называют колебательным, при условии, что
называют колебательным, при условии, что 
Если же  ,то рассматриваемое звено может быть разложено на два последовательно соединенных одно-емкостных звена.
,то рассматриваемое звено может быть разложено на два последовательно соединенных одно-емкостных звена.
Звено с оператором Q(p)=D называют интегрирующим звеном.
( Это следует из того, что  ;
;  )
)
Особенностью этого звена является его свойства реакции (отклика), пропорциональной значению интеграла от входной функции.
Звено, описываемое оператором  может быть разложено на два последовательно соединенных интегрирующих звена.
может быть разложено на два последовательно соединенных интегрирующих звена.
Звено, описываемое оператором  может быть представленo как последовательная комбинация звеньев
может быть представленo как последовательная комбинация звеньев  ;
;  , т. е. как последовательное соединение астатического и одно-емкостного звеньев.
, т. е. как последовательное соединение астатического и одно-емкостного звеньев.
·Классификация звеньев по видам передаточной функции
В соответствии с основной теоремой алгебры, полиномы передаточной функции системы
![]()
могут быть разложены на множители первой и второй степени. Это означает, что передаточная функция системы может быть представлена как произведение передаточных функций элементарных (типовых) звеньев. А сама система в таком случае есть последовательное соединение таких звеньев.
![]()
![]()
![]() V(p) Y(p) V(p) Y1(p) Yn-1(p) Y(p)
V(p) Y(p) V(p) Y1(p) Yn-1(p) Y(p)
![]()

![]()
![]()
![]() W(p) º W1(p) … Wn(p)
W(p) º W1(p) … Wn(p)
Замечание: Если собственный оператор звена имеет положительные все полиномиальные коэффициенты, то говорят, что такие звенья устойчивы.
К этой группе относят следующие статические типовые звенья:
Усилительное W(p)=k
Апериодическое (часто называют инерционным) 
Колебательное 
Реально дифференцирующее (часто называют гибким, изодромным или звеном без статизма)
Если хотя бы один полиномиальный коэффициент собственного оператора звена отрицателен, то такое звено относят к группе неустойчивых звеньев.
Примеры неустойчивых звеньев:
Отсутствие в собственном операторе какого-то одного коэффициента (когда он равен 0)
указывает на то, что это звено относится к группе нейтральных звеньев.
К этой группе относят интегрирующие 
Реально интегрирующие (т. е. астатическое звено второго порядка)
Если полином передаточной функции не содержит младшего члена (свободного), то
говорят об астатическом звене.
Если такой элемент есть, то говорят о статическом звене.
·По быстродействию
Звенья классифицируются как:
Безинерционные – усилительные звенья.
Инерционные – все звенья, правая часть дифференциальных уравнений которых имеет вид: kV(t)
Форсирующие – звенья с передаточной функцией 
При ![]() говорят о дифференцирующем звене.
говорят о дифференцирующем звене.
Если только b2=0, то говорят о форсирующем звене первого порядка.
Если ни один из коэффициентов не равен 0, то говорят о форсирующем звене второго порядка.
Напоминание 1: В общей форме дифференциальные уравнения типовых звеньев следующие:
![]() -апериодическое (инерционное) звено
-апериодическое (инерционное) звено
![]() - форсирующее звено первого порядка
- форсирующее звено первого порядка
![]() - колебательное звено
- колебательное звено
![]() - астатическое звено первого порядка
- астатическое звено первого порядка
![]() - резонансное (консервативное) звено
- резонансное (консервативное) звено
![]() - форсирующее звено второго порядка
- форсирующее звено второго порядка
![]() - дифференцирующее звено
- дифференцирующее звено
![]() - реально дифференцирующее звено
- реально дифференцирующее звено
![]() - интегрирующее звено
- интегрирующее звено
Напоминание 2: По своей структуре дифференцирующие звенья могут быть
а) гибким (изодромным) со статизмом, т. е. ![]()

б) гибким (изодромным) без статизма, т. е.

в) собственно дифференцирующим
![]()
Данные о динамических типовых звеньях.
Звено | Уравнение | W(p) | h(t) | w(t) | A(w) | j(w) |
Усилительное | Y(t)=kV(t) | k | h(t)
k×1(t) t |
k×d(t) t |
w |
w |
Интегрирующее (астатическое) |
|
|
kt t |
k×1(t) t |
|
|
Апериодическое (инерционное) |
|
|
|
|
| arctgT |
Дифференцирующее |
| kp | d(t) |
| kw |
|
Колебательное |
|
|
|
|
|
|
Запаздывающее | Υ(t)=kV(t-τ) |
| k×1(t-τ) | kδ(t-τ) | k | -ωτ |


 w(t)
w(t)



 h(t)
h(t)

 w(t)
w(t)


Напоминание 1: Обобщенная функция Хевисайда и функция Дирака являются типовыми входными воздействиями динамических звеньев. А функция перехода и весовая функция являются реакциями на заданное воздействие. При этом фильтрующее свойство функции Дирака записывают в виде свертки.
![]() , а – момент прохождения импульса
, а – момент прохождения импульса
Это соотношение означает наличие следующих свойств у функции Дирака:
δ(t-a)=0 при всех t < a, t > a
δ(t)=¥ при t = a
при этом очевидно, что ![]()
Напоминание 2: согласно интегралу Дюамеля реакция динамического звена на произвольное воздействие есть свертка (закладка) весовой функции и входа.
![]()
Это означает, что передаточная функция динамического звена есть преобразование по Лапласу его весовой функции.
![]() ,
, 
Эквивалентные преобразования структурных схем.
В структурных схемах системы реализуются только операции умножения и суммирования передаточной функции и звеньев.
Поскольку эти операции коммутативны, ассоциативны и дистрибутивны, то задача построения структурной схемы системы может решаться неоднозначно, т. е. можно получить несколько вариантов графического представления. Но после соответствующих преобразований оказывающихся эквивалентными.
A = <M,Ω>
Л = {∙, +} f: W2 ─> W
М = {W}i =1,n f = W×W
Основные правила структурных схем сведем к соответствию:
1. Перестановка однородных элементов (сумматоры, узлы ответвленья, сами звенья) в последовательных и параллельных схемах.
Название операции | Исходная схема | Преобразованная схема |
Перенесение сумматора через сумматор |
|
|
Перенесение через звено последовательной схемы |
|
|
Перенос узла через узел |
|
|
Перенос звена в параллельной схеме |
|
|

2. Перестановка неоднородных элементов (сумматора с узлом звеньев в прямой цепи и цепи с ОС, узла со звеном, сумматора со звеном)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
