

Название операции | Исходная схема | Преобразованная схема |
Перенос сумматора через узел по ходу сигнала |
|
|
Название операции | Исходная схема | Преобразованная схема |
Перенос узла через сумматор по ходу сигнала |
|
|
Перенос звеньев в системе с ООС |
|
|
Перенос звеньев в системе с положительной ОС |
|
|
Перенос узла через звено по ходу сигнала |
|
|
Перенос звена через узел по ходу сигнала |
|
|
Перенос сумматора через звено по ходу сигнала |
|
|
Перенос звена через сумматор по ходу сигнала |
|
|
В приведенных таблицах:
· Совокупность последовательно соединенных n однородных звеньев можно заменить одним звеном, передаточная функция которого равна произведению передаточных функций исходных звеньев.
![]()
![]() Действительно, т. к. y1= W1(p)V1, … , y= Wn(p)yn-1, то исключив из этой системы y1…yn-1 получим y = W1(p)*W2(p)*…*Wn(p)*V
Действительно, т. к. y1= W1(p)V1, … , y= Wn(p)yn-1, то исключив из этой системы y1…yn-1 получим y = W1(p)*W2(p)*…*Wn(p)*V
· Совокупность параллельно соединенных однородных звеньев можно заменить одним звеном, передаточная функция которого есть сумма передаточных функций звеньев.
y1 = W1(p)*V, y2 = W2(p)*V, … , yn = Wn(p)*V
Сложив эти n уравнений имеем:

· Совокупность звена, с охватывающим его звеном ОС можно заменить звеном с передаточной функцией.
 + для ПОС; – для ООС
+ для ПОС; – для ООС
Т. к. рассогласование ∆ =V±VОС y =Wп∙∆ VОС = WОС(p)∙y, то исключив из этой системы ∆, VОС получим:
y = WП∙(V– WОС(p)∙y) = Wп(p)∙V
т. е. 
Если передаточная функция звена цепи ОС = 1, то говорят о единичной ОС, в этом случае передаточная функция записывается в виде:
![]()
Пояснение:
Перенос сумматора через звено:
Действительно: y = W2(p)∙(y1+z) = W2(p)∙y1+W2(p)∙z
· Перенос узла через звено:
![]()
![]()



· а) Перенос рядом расположенных узлов: 2 узла всегда можно поменять местами.
· б) Перестановка рядом расположенных сумматоров: 2 сумматора всегда можно поменять местами.
· Перестановка узла и сумматора:
Узел и сумматор всегда можно поменять местами (если они рядом расположены)

![]()
![]()
![]()
Примеры преобразований структурных схем САУ:
Найти передаточную функцию одноконтурной системы управления:
Решение представленной задачи следующее:
![]()
![]()
![]()

 ,
, 
![]()
Это так называемая многоконтурная система управления с перекрещивающимися связями. При вычислении передаточной функции по управлению считают дестабилизирующий фактор z=0, а при вычислении передаточной функции по возмущению считают входное воздействие U=0.
а) передаточная функция по управлению:
Передаточную функцию по управлению найдем последовательным преобразованием структуры исходной САУ:
![]()

![]()
![]() -передаточная функция по управлению.
-передаточная функция по управлению.
б) Передаточная функция по возмущению (получим аналогично):
![]()
![]()

Весовая функция систем управления.
Весовая функция системы управления обусловлена как весовыми функциями составляющих звеньев, так и её структурой (т. е. отношениями на множестве звеньев).
Последовательность соединения двух звеньев:

Пусть задана структура системы как последовательное соединение двух звеньев. Следовательно, реакция (весовая функция) первого звена на функцию Дирака (d-функцию) является входом второго звена. В соответствии с теоремой Дюамеля имеем: 
Замечание: Если линейная система является стационарной, то порядок следования звеньев для определения реакции не имеет значения.

Пусть система есть параллельное соединение звеньев:
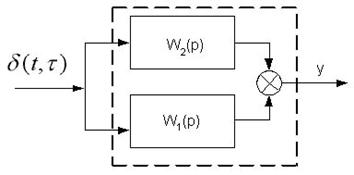
![]()
Локальные свойства звеньев, охваченных обратной связью
Для апериодических звеньев, охваченных Ос, их свойства изменяются в зависимости от типа звеньев в ОС.
Пусть Woc(p)=Koc
a) Отрицательная ОС (ООС)
Отсюда следует, что жесткая ОС преобразует исходное апериодическое (инерционное) звено в апериодическое звено с уменьшенным коэффициентом усиления и с меньшей постоянной времени.
b) Положительная обратная связь (ПОС)
1) 
При неполной компенсации исходное апериодическое звено становится апериодическим звеном с увеличенным коэффициентом усиления, но с меньшим быстродействием.
2) 
При перекомпенсации устойчивое апериодическое звено преобразуется в неустойчивое апериодическое звено с постоянной времени ![]() и коэффициентом усиления
и коэффициентом усиления ![]()
3) 
При полной компенсации апериодическое звено с обратной связью преобразуется в интегрирующее.
2. Пусть звено в Ос является гибкой связью, содержащей дифференцирующее звено.

a) ООС
т. е. замкнутая система есть так же апериодическое звено, но с увеличенной постоянной времени.
b) ПОС
Для положительной обратной связи результат зависит от степени компенсации членов первого порядка (в отличие от жесткой ОС, когда говорят о степени компенсации младших членов знаменателя)
![]()
1) 
При неполной компенсации получаем апериодическое звено с большим быстродействием (меньшей постоянной времени)
2) 
При полной компенсации замкнутая система становится усилительным звеном.
3) 
При перекомпенсации имеем неустойчивое звено.
Анализ линейных систем управления
Анализ систем управления—это исследование влияния структуры, числовых значений параметров и воздействий (входных и дестабилизирующих) на динамические свойства, на поведение системы.
Анализ линейных систем в ТУ осуществляется на основе изучения свойств решений линейных дифференциальных уравнений, описывающих эти системы управления.
Основным содержанием анализа систем является:
· исследование устойчивости
· исследование качества переходного процесса (перерегулирование)
· исследование точности воспроизведения управляющих воздействий.
Примечание:
· проблема анализа ЛСАУ могла ба быть полностью исчерпана, если бы достаточно просто и быстро можно было бы вычислять корни харктеристического (векового) уравнения

Именно по корням векового уравнения можно судить об устойчивости замкнутой системы и качестве переходного процесса в ней. Однако, поскольку алгебраические уравнения  выше 4ой степени не решаются в общем случае в радикалах, т. е. для исследования САУ, описываемого дифференциальными уравнениями выше 4го порядка широко используется качественная теория дифференциальных уравнений, т. е. математическая дисциплина, изучающая свойства решений обыкновенных дифференциальных уравнений без нахождения самих решений.
выше 4ой степени не решаются в общем случае в радикалах, т. е. для исследования САУ, описываемого дифференциальными уравнениями выше 4го порядка широко используется качественная теория дифференциальных уравнений, т. е. математическая дисциплина, изучающая свойства решений обыкновенных дифференциальных уравнений без нахождения самих решений.
· Возможные положения корней векового уравнения для замкнутой системы в комплексной плоскости могут быть:
Принято корни векового уравнения:
· С отрицательными вещественными частями называть левыми: l4,l’4,l5 (т. к. эти корни располагаются слева от мнимой оси)
· С положительными вещественными частями называть правыми
· Понятие устойчивости как способности того или иного объекта, состояния или процесса сопротивляться не учитываемым заранее дестабилизирующим факторам является в настоящее время в физике, технической кибернетике центральным понятием. Далее формулировка понятия устойчивости будет по Ляпунову.
Анализ устойчивости линейных САУ
Ниже рассмотрим устойчивость равновесия и устойчивость движения линейных замкнутых систем таких, что их математическая модель ![]()
Замечание:
· Строго устойчивость равновесия системы определяется и исследуется так же, как и устойчивость движения.
· Динамическая система находится в устойчивом состоянии, если при малом возмущении система во все последующее время мало отклоняется от состояния равновесия.
· Устойчивость движения системы есть способность системы слабо менять (в том или ином смысле) свое состояние или свойства под действием возмущения
Примечание:
· Движение системы с математической точки зрения заключается в том, что состояние объекта управления с течением времени изменяется, т. е. фазовые координаты (выходные параметры) являются функциями времени.
· Невозмущенным (требуемым, заданным) движением системы называется движение объекта управления при отсутствии возмущенных воздействий.
· При воздействии на объект управления (помимо управляющих параметров, возмущений) система переходит от заданного движения к новому, так называемому возмущенному движению.
· Заданное движение называется устойчивым, если траектория возмущенного движения объекта управления после снятия дестабилизирующих факторов стремится к траектории невозмущенного движения
Основные понятия теории устойчивости
Теория устойчивости —совокупность представлений и методов, обобщающих и формализующих различные аспекты устойчивости разнообразных систем.
1. Экспликация понятия устойчивости.
1.1. Наглядным примером, демонстрирующим некоторые аспекты понятия устойчивости является простейшая динамическая система: тяжелый шарик на неровной поверхности.
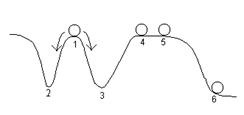
В т.1 потенциальная энергия шарика имеет максимум, что означает, что это равновесное положение шарика неустойчивое (т. е. под действием малых возмущений шарик скатывается в более низкую точку 2 или 3, где его потенциальная энергия имеет минимум). В этих точках (2 или 3) состояние равновесия будет устойчивым.
Если пренебречь трением, то шарик будет в течение бесконечного времени совершать колебания вблизи положения устойчивого равновесия.
Если шарик (при других начальных условиях) начнет скатываться с точки более низкой, чем т.1, то амплитуда колебаний будет меньше (т. к. начальная энергия будет меньше). Однако, близким начальным данным будут отвечать траектории (решения матричного дифференциального уравнения) с близкими периодами и амплитудами - это т. н. орбитальная устойчивость.
Однако в том случае, когда трение не мало скорость шарика будет убывать и он остановится в точке устойчивого равновесия – это состояние устойчиво асимптотически. (В фазовом пространстве является притягивающим множеством).
Если слабо деформировать поверхность с которой скатывается шарик, то характер движения его не изменится, это т. н. структурная устойчивость. Говорят, что динамическая система устойчива в малом и не устойчива в большом.
2. Система находится в безразличном состоянии равновесия:
3. Система находится в полуустойчивом состоянии равновесия:
Замечание:
1. Для устойчивого объекта управления часто используется понятие самовыравнивание, т. е. если ОУ самостоятельно (без помощи управляющей подсистемы) переходит к новому устойчивому состоянию при воздействии возмущающего фактора.
2. Наглядная демонстрация понятия «устойчивость/неустойчивость» может быть отклик системы на типовые воздействия (функция Хевисайда, функция Дирака, гармоническая функция). При этом под устойчивостью линейной системы понимается ее свойство обеспечивать затухание переходного процесса.
Система, имеющая переходные процессы вида:

![]() y Апериодический затухающий процесс
y Апериодический затухающий процесс
![]() t
t
относятся к устойчивым системам.
Система, обладающая одним из незатухающих возрастающих колебаний, относится к неустойчивым системам:

![]() y
y
t
Из рассмотренных примеров следует, что система устойчива, если ее выходная переменная остается сколь угодно малая при любых достаточно малых по абсолютной величине входных воздействий.
Понятие об устойчивости решения системы дифференциальных уравнений
Пусть имеем систему дифференциальных уравнений:
![]() ,
, ![]()
![]() - существуют и непрерывны (
- существуют и непрерывны (![]() )
)
И пусть ![]() (
(![]() ) есть решение (интеграл) нашей системы, удовлетворяющий начальным условиям
) есть решение (интеграл) нашей системы, удовлетворяющий начальным условиям ![]() (
(![]() ).
).
Решение заданной системы называется устойчивым по Ляпунову при ![]() если для
если для ![]() можно подобрать такое
можно подобрать такое ![]() такое, что для всякого решения той же системы, начальные условия которой удовлетворяют неравенству
такое, что для всякого решения той же системы, начальные условия которой удовлетворяют неравенству ![]() для всех
для всех ![]() справедливо неравенство
справедливо неравенство ![]() ,
, ![]() , т. е. близкие по начальному условию решения остаются близкими для всех времен > t0.
, т. е. близкие по начальному условию решения остаются близкими для всех времен > t0.
 ,
, ![]()
то решение называет асимптотически устойчивым.
Пример 1:
Каждое решение уравнения устойчиво ![]() . Действительно решение
. Действительно решение ![]() . Для этих решений
. Для этих решений
 - для
- для ![]() .
.
Следовательно, для всякого ![]() ,
, ![]() (например,
(например,![]() ), такое, что как только
), такое, что как только ![]() , то для решения
, то для решения ![]() будет выполняться неравенство
будет выполняться неравенство ![]() при всех
при всех ![]() . Однако асимптотическая устойчивость для этих решений нет, т. к.
. Однако асимптотическая устойчивость для этих решений нет, т. к. ![]() не стремится к нулю при
не стремится к нулю при ![]() .
.
Пример 2:
Пример 3: Для уравнения ![]() решение не устойчиво
решение не устойчиво ![]() , т. к. при
, т. к. при ![]() все решения уравнения
все решения уравнения ![]() (стремятся к +1).
(стремятся к +1).
Напоминание:
Точка ![]() называется точкой покоя (особой точкой системы)
называется точкой покоя (особой точкой системы)
 , если
, если ![]() и
и ![]() .
.
Простейшие типы точек покоя
· Устойчивый узел:
 |
· Неустойчивый узел:
· Устойчивый фокус:
· Неустойчивый фокус:
· Центр:
 |
· Седло:
Пример: Линейная система 2-х уравнений:
 , здесь aij – постоянные.
, здесь aij – постоянные. 
![]()
Необходимо исследовать положение траекторий в окрестности т. ![]() .
.
Ищем решение в виде: ![]() ,
, ![]() .
.
Рассмотрим следующие случаи:
1. Корни характеристического уравнения различны и действительны:
а) ![]() : точка покоя асимптотически устойчива - устойчивый узел.
: точка покоя асимптотически устойчива - устойчивый узел.
б) ![]() : имеем неустойчивый узел в точке
: имеем неустойчивый узел в точке ![]() .
.
в) ![]() : точка покоя неустойчива - седло.
: точка покоя неустойчива - седло.
г) ![]() : точка покоя неустойчива – фокус.
: точка покоя неустойчива – фокус.
д) ![]() : точка покоя устойчива – устойчивый фокус (не асимптотически).
: точка покоя устойчива – устойчивый фокус (не асимптотически).
2. Корни векового уравнения комплексные: 
а) ![]() : точка покоя – фокус
: точка покоя – фокус
б) ![]() : точка покоя – неустойчивый фокус
: точка покоя – неустойчивый фокус
в) ![]() : точка покоя – центр (асимптотической устойчивости нет)
: точка покоя – центр (асимптотической устойчивости нет)
3. Корни кратны:
а) ![]() : точка покоя – асимптотически устойчивый узел
: точка покоя – асимптотически устойчивый узел
б) ![]() : точка покоя – неустойчивый узел
: точка покоя – неустойчивый узел
в) ![]() : точка покоя неустойчива
: точка покоя неустойчива
Примечание:
Если размерность системы дифференциальных уравнений выше двух, то на ряду с приведенными типами устойчивости точек покоя могут появиться более сложные комбинации типа: узел-седло, узел-фокус, фокус-центр и т. д.
Пример:
Определить в каком случае точка покоя устойчива если k – параметр:
![]()
Вековое уравнение: ![]()
Асимптотическая устойчивость любого решения будет иметь место при и k>0 и при 1-k>0, т. е. при 0<k<1.
Устойчивость будет в 2-х случаях:
1. k>0, 1-k=0, т. е. при k=1.
2. k=0, 1-k>0, т. е. при k=0.
При всех остальных k нулевое решение не устойчиво.
Примечание:
Для того чтобы физически возможная линейная САУ была устойчива необходимо и достаточно, что бы ее вековая функция удовлетворяла условиям:
Приведенный критерий устойчивости означает, что устойчивость линейной системы определяется лишь ее структурой и параметрами системы и не зависит от поступающих воздействий.
Задача исследования устойчивости систем имеет цель:
a) Выяснение устойчивости системы при определенных значениях ее параметров с заданной структурой;
b) В случае неустойчивой системы определение возможности обеспечения устойчивости выбором других параметров и способов их выбора;
c) Нахождение области значений параметров, в пределах которой система устойчива и имеет требуемую динамику (т. е. поведение во время переходного процесса: апериодическое, колебательное и др.)
Примечания:
1) Системы, неустойчивые при любых значениях своих параметров, принято называть структурно неустойчивыми.
2) Изменение динамических свойств системы управления с целью обеспечения требуемых показателей качества процесса управления (с запросом устойчивости, временем реакции и др.) называется коррекцией системы управления (СУ).
Коррекцию СУ осуществляют изменением ее параметров (постоянных времени, коэффициентов усиления) или ее структуры; включением дополнительных корректирующих звеньев (если звено включают в прямую цепь, то последовательная коррекция; включение звена в звено с местной обратной связью означает встречную параллельную коррекцию, а включение звена параллельно какому-то звену называется параллельной коррекцией). Применение комбинированного принципа управления означает включение корректирующей цепи по основному возмущающему воздействию.
Качественная теория дифференциальных уравнений.
Раздел теории управления, в котором поведение объекта исследуется по виду его эволюционной модели.
Проблема решения задачи устойчивости была бы снята, если можно было бы находить просто и легко корни характеристического уравнения эволюционной модели. Но решение в свободных радикалах возможно только для уравнений не выше 4-той степени.
Критерии устойчивости.
Критерий Рауса.
Для того, чтобы все корни характеристического (векового) уравнения:

![]()
![]()
![]()
![]()
имели отрицательные вещественные части, необходимо и достаточно, чтобы все элементы первого столбца таблицы Рауса были положительны.
Nст Nстр | 1 | 2 | 3 | 4 |
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
В первую строку выписывают коэффициенты характеристического уравнения с четными индексами, во вторую – с нечетными.
 , где
, где 
Т. о. третья строка получается перекрестным умножением первых двух строк и делением на первый элемент предыдущей строки. Все последующие строки получаются аналогичным способом из двух предыдущих строк.
Примечания:
1) Число строк таблицы Рауса равно степени характеристического уравнения +1.
2) В первой строке таблицы Рауса число элементов равно целой части числа ![]() , а во второй
, а во второй ![]() .
.
3) В i-той строке таблицы Рауса при i>2 число элементов на 1 меньше, чем в (i-2)-ой строке.
4) Характеристический многочлен называется регулярным, если все числа первого столбца таблицы Рауса отличны от 0.
5) Необходимым условием устойчивости СУ любого порядка является положительность всех коэффициентов векового уравнения эволюционной модели системы.
Критерий Гурвица.
В этом случае роль таблицы Рауса играет матрица Гурвица, а роль первого столбца – последовательность главных миноров.
Пояснения:
1) Матрица Гурвица: i-ая строка имеет вид ![]()
al=0, l<0 или l>n (условие Гурвица)
Г) Минор Dk (k=1..n-1), образуется из определителя вычеркиванием в нем последних (n-k) строк и столбцов.
Пример: 
![]()


Критерий Лгенар-Шипаро
Этот критерий является модификацией критерия Гурвица. Все вычисления сводятся к вычислению главных миноров только четного или нечетного порядка. Любое из следующих четырех условий является необходимым и достаточным для того, чтобы все корни векового уравнения (аi - действительное число, а0>0) имели отрицательные действительные части.
Пример: Для предыдущего примера получаем, т. к. все коэффициенты характеристического уравнения положительны, то выполняется условие ![]()
Графические (геометрические) критерии устойчивости
Критерий Михайлова
Все корни характеристического уравнения с действительными коэффициентами и а0=1 имеют строго отрицательные действительные части тогда и только тогда, когда комплекснозначная функция 

Действ. перем. ![]()
![]()
![]() описывает в комплексной плоскости Z кривую (годограф Михайлова), начинающуюся на положительной действительной полуоси, не попадающую в начало координат и последовательно проходящую против хода часовой стрелки и квадрантов.
описывает в комплексной плоскости Z кривую (годограф Михайлова), начинающуюся на положительной действительной полуоси, не попадающую в начало координат и последовательно проходящую против хода часовой стрелки и квадрантов.
Пояснения:
Этот критерий равносилен критерию Рауса-Гурвица, однако носит геометрический характер и не требует проверки детерминированности неравенств. По существу критерий Михайлова является геометрической интерпретацией принципа аргумента, т. е. приращение аргумента комплекснозначной функции.![]()
здесь ![]() - приращение аргумента полинома
- приращение аргумента полинома ![]() при изменении частоты ω от 0 до ¥, он равен разности левых (n-m) и правых m корней уравнения умноженных на p.
при изменении частоты ω от 0 до ¥, он равен разности левых (n-m) и правых m корней уравнения умноженных на p.
![]()
![]() ¹0
¹0
а графически изображаем годограф при изменении параметра (0, ¥)
![]()
![]() и
и ![]() - аргумент и фаза
- аргумент и фаза
Очевидно, что при ω=0 Х(ω=0)=аn и Y(ω=0)=0
В зависимости от показателя степени векового уравнения Х(ωÞ¥) и Y(ωÞ¥) может быть отрицательной или положительной бесконечностью.
Форма годографа Михайлова для различных n:
![]()
![]()


![]()
![]()
Признаком неустойчивой системы является нарушение числа и последовательности пройденных годографом Михайлова квадрантов координатной плоскости (в следствие чего угол поворота вектора оказывается <![]() ).
).
Критерий Найквиста
Этот критерий позволяет по годографу амплитудно-фазовой характеристики разомкнутой системы судить об устойчивости ее в замкнутом состоянии. Предполагая, что степень полинома частотной характеристики разомкнутой системы:
Предполагают, что степень полинома в числителе меньше, чем степень полинома знаменателя частотной характеристики разомкнутой системы, а также, что указанные полиномы не имеют общих корней с неотрицательной вещественной частью. Критерий Найквиста формулируется следующим образом:
Система неустойчивая в разомкнутом состоянии и имеющая m корней с положительной вещественной частью будет устойчива в замкнутом состоянии если амплитудно-фазовая характеристика  охватывает точку (-1,
охватывает точку (-1, ![]() ) в направлении против хода часовой стрелки
) в направлении против хода часовой стрелки ![]() раз.
раз.
Пояснение:
1. Формулировка критерия означает, что угол поворота вектора проведенного из точки (-1, ) характеристики при возрастании частоты от 0 до ∞ должен быть равен .
4. В частном случае если разомкнутая система устойчива (т. е. m=0), то критерий Найквиста наиболее прост:
Система устойчива в разомкнутом состоянии будет устойчива в замкнутом состоянии, если АФХ ![]() не охватывает точки (-1,
не охватывает точки (-1, ![]() ).
).
![]()

![]() Пример: 1.
Пример: 1.
![]()
![]()
(-1, )
m=0
Статическая САУ в замкнутом состоянии не устойчива.
![]() 2.
2.
 |
![]()
![]() (-1, )
(-1, )
m=0
Статическая САУ в замкнутом состоянии устойчива.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
