

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
· x3 –ЭВМ имеет существенные неисправности, может решать ограниченный класс задач;
· x4 – ЭВМ полностью вышла из строя.
Считаем, что в начальный момент ЭВМ полностью исправна. Проверка ЭВМ производится в фиксированные моменты времени t1 , t 2 , t3 . Процесс, протекающий в системе, можно рассматривать как цепь Маркова с тремя шагами (1-я, 2-я, 3-я проверки ЭВМ).
Пусть заданна матрица переходов в виде:
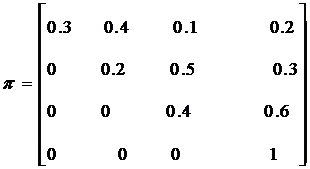
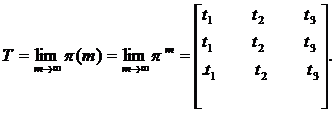
Определить вероятности состояний после трех проверок, т. е.:
![]()
Задача 7.6. Задана матрица перехода π вида:
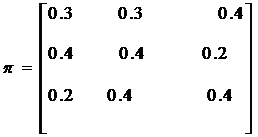
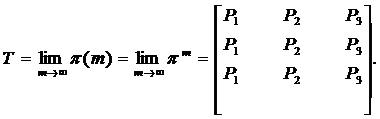
Найти матрицу финальных вероятностей T вида:
8. Определение матрицы М среднего времени перехода
Теоретические сведения
Матрица М определяется соотношением:
| (8.1) |
где
| (8.2) |
Здесь I – единичная матрица; π – матрица перехода; Т – матрица финаль-
ных вероятностей; E – единичная матрица (все элементы матрицы E равны единице); Z dg – матрица, получающаяся из матрицы Z обнулением внедиагональных элементов; D – диагональная матрица с элементами, равными обратным значениям элементов диагонали матрицы финальных вероятностей T.
Решение типовых задач
Задача 8.1. Система может находиться в одном из трех состояний:
![]()
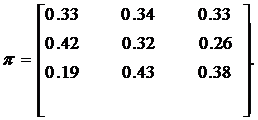
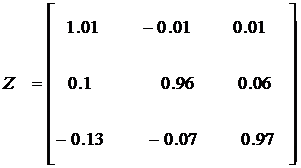
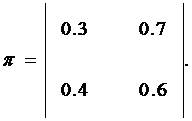
Процесс в системе описывается цепью Маркова. Матрица перехода имеет вид:
| (8.3) |
Определить матрицу M.
Решение. Найдем первоначально матрицу финальных вероятностей
T вида:
| (8.4) |
Из (7.9) имеем для n = 3:
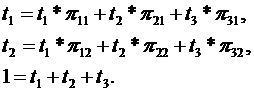
или
| (8.5) |
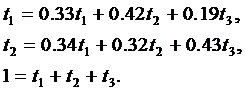
Решая систему алгебраических уравнений (8.5), получим:
![]()
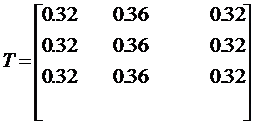
Из (8.4) имеем:
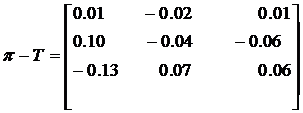
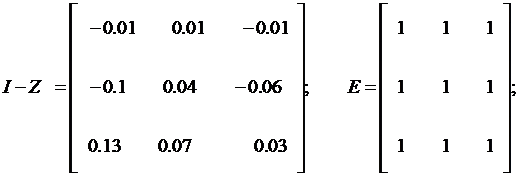
Определим π − T . Имеем:
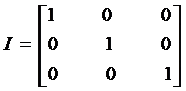
Определим матрицу I. Получим:
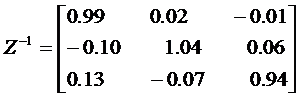
Найдем матрицу
![]()
Будем иметь:
Определим матрицу Z. Получим:
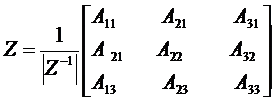
где ![]() – определитель матрицы
– определитель матрицы ![]() . Здесь:
. Здесь:
Матрица Z имеет вид:
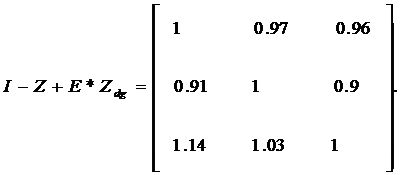
Определим матрицы I − Z, E * Zdg. Получим:
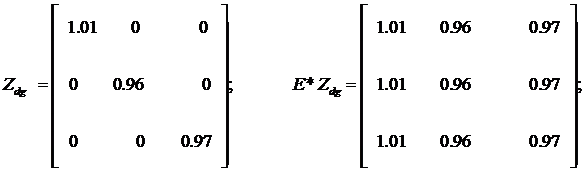
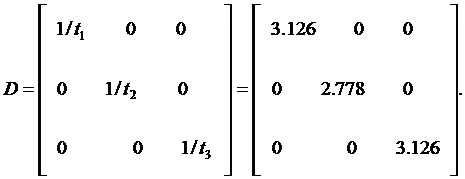
Опередим матрицу D. Получим:
Определим матрицу M. Получим: 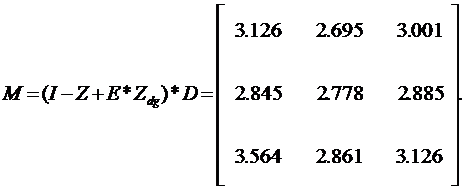
Каждый элемент полученной матрицы M характеризует среднее время
перехода из одного в другое соответствующее состояние. Так, время
перехода из первого в первое состояние в среднем равно 3,126 шага, из
первого состояния во второе - 2,695 шага, из первого в третье - 3,001 шага и т. д.
Задачи для самостоятельного решения
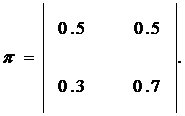
Задача 8.2. Матрица перехода имеет вид:
Определить матрицу М.
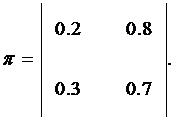
Задача 8.3. Матрица перехода имеет вид:
Определить матрицу М.
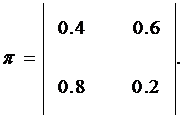
Задача 8.4. Матрица перехода имеет вид:
Определить матрицу М.
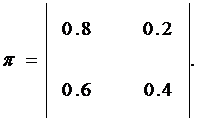
Задача 8.5. Матрица перехода имеет вид:
Определить матрицу М.
Задача 8.6. Матрица перехода имеет вид:
Определить матрицу М.
Задача 8.7. Матрица перехода имеет вид:
Определить матрицу М.
Задача 8.8. Матрица перехода имеет вид:
Определить матрицу М.
9. Каноническое разложение случайного процесса
Пусть случайный процесс X (t) представлен в виде:
| (9.1) |
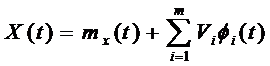
где mx(t ) – математическое ожидание случайного процесса X (t ) ; ϕi (t ) –
неслучайные функции времени; Vi – случайные величины, причем:
M [Vi ] = 0; M [Vi*V j ] = 0; если i ≠ j
M [Vi2 ] = Di.
Здесь Di – дисперсия случайной величины Vi, m – количество неслучайных функций в каноническом разложении.
Соотношение (9.1) называется каноническим разложением случайного процесса X (t ) .
Соотношению (9.1) соответствует корреляционная функция вида:
| (9.2) |
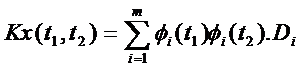
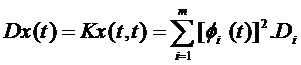
Соотношение (9.2) называется каноническим разложением корреляционной функции K x (t1 , t 2 ). Из (7.2) определим дисперсию Dx (t ) случайного процесса X (t ) . Имеем:
| (9.3) |
Задача 9.1. Случайная функция X (t ) задана каноническим разложе-
нием:
X (t) = 3t + X1 ⋅ cos ωt + X 2 ⋅ sin ωt + X 3 ⋅ cos 2ωt + X 4 ⋅ sin 2ωt.
Случайные величины X 1 , X 2 , X 3 , X 4 имеют следующие математические ожидания и дисперсии:
m x1= m x 2 = m x 3 = m x 4 = 0; D x1 = D x 2 = 1; D x 3 = D x 4 = 3.
Определить m x (t ), K x (t1 , t 2 ), Dx (t ).
Решение. Найдем m x (t ). Имеем:
M x (t) = 3t.
Определим K x (t1 , t 2 ). Получим:
K x (t1 , t 2 ) = cos ωt1 ⋅ cos ωt2 + sin ωt1 ⋅ sin ωt 2 +
+ 3 cos 2ωt1 ⋅ cos 2ωt2 + 3 sin 2ωt1 sin 2ωt 2 =
= cos ω(t1 – t2 ) + 3 cos 2ω(t1 – t2 ).
Определим D x (t ). Имеем:
Dx (t ) = K x (t, t ) = 4.
Задача 9.2. Случайная функция X (t) задана каноническим разложением:
X (t) = 2t + X 1 ⋅ sin t + X 2 ⋅ cos t.
Случайные величины X 1 , X 2 имеют следующие математические ожидания
и дисперсии:
m x1 = m x 2 = 0; D x1 = D x 2 = 3 .
Найти каноническое разложение случайной функции Y (t) вида:
Y (t ) = t ⋅ X (t) – t2 .
Определить m y (t ), K y (t1 , t 2 ), D y (t ).
Решение. Найдем каноническое разложение Y (t) . Имеем:
Y (t ) = t 2 + X 1t ⋅ sin t + X 2t ⋅ cos t.
Определим m y (t). Получим: m y (t ) = t 2 . Найдем K y (t1 , t 2 ). Имеем:
K y (t1 , t 2 ) = 3t 1t 2 sin t 1 ⋅ sin t 2 + 3t 1t 2 cos t 1 ⋅ cos t 2 =
= 3t 1t 2 cos(t 1 − t 2).
Определим D y (t). Получим:
D y (t) = K y (t, t ) = 3t 2 .
Задачи для самостоятельного решения
Задача 9.3. Найти математическое ожидание, корреляционную функ-
цию и дисперсию случайной функции:
X (t) = X 1 ⋅ sin ωt + X 2 ⋅ cos ωt + 3t 2 ,
где X 1 , X 2 – некоррелированные случайные величины с
m X 1 = 2; m X 2 = 0,1; D X1 = 0,01; D X 2 = 0,04.
Задача 9.4. Случайная функция X (t) задана каноническим разложе-
нием:
X (t) = sin t + X 1 ⋅ sin 2t + X 2 ⋅ cos 2t.
Случайные величины X 1 , X 2 имеют следующие математические ожида-
ния и дисперсии:
m X1 = m X 2 = 0; D X1 = 0,2; D X 2 = 0,3.
Найти каноническое разложение случайной функции Y (t) вида:
Y (t) = 2t ⋅ X (t) + t3 − 1.
Определить m y (t ), K y (t1 , t 2 ), D y (t ).
Задача 9.5. Случайная функция X (t) задана каноническим разложе-
нием:
X (t) = t + 2 + X 1t 2 + X 2 t 3 + X 3t 4 .
Случайные величины X 1 , X 2 , X 3 имеют следующие математические ожи-
дания и дисперсии:
m X1 = m X 2 = m X 3 = 0; D X1 = 1; D X 2 = 2; D X 3 = 0,1.
Найти каноническое разложение случайной функции Y (t) вида:
Определить m y (t), K y (t1 , t 2), D y (t).
Задача 9.6. Корреляционная функция K x (t1 , t 2) случайной функции
X (t) задана каноническим разложением:
K x (t1 , t 2 ) = 2 sin ωt1 ⋅ sin ωt 2 + 4 cos ωt1 ⋅ cos ωt 2 .
Найти каноническое разложение случайной функции X (t) , если ее мате-
матическое ожидание: m x (t) = t3 + 3.
10. Задача детерминированного линейного оптимального управления
Теоретические сведения
Рассмотрим объект управления, возмущенное движение которого описывается в первом приближении уравнением:
| (10.1) |

Здесь А и В – заданные матрицы чисел размеров n×n и n×m соответственно; x(t) – вектор состояния (вектор фазовых координат) размерности n×1; u(t) – вектор управления размерности m×1. Рассмотрим также критерий
| (10.2) |

где R1 и R2 – положительно определенные симметрические матрицы размеров n×n и m×m соответственно. Тогда задача определения u(t), t0 ≤ t ≤ ∞ , при которой критерий минимален, называется задачей детерминированного линейного оптимального управления для регулятора с постоянными параметрами.
Закон управления определяется соотношениями:
| (10.3) |
где
| (10.4) |
Установившееся решение Р является решением алгебраического уравнения Риккати:
| (10.5) |
Р является неотрицательно определенной матрицей.
Решение типовых задач
Задача 10.1. Задача стабилизации угловой скорости.
Объект состоит из двигателя постоянного тока, управляемого входным напряжением μ(t), с угловой скоростью вала ξ(t). Система описывается скалярным дифференциальным уравнением состояния
| (10.6) |

Критерий оптимальности имеет вид:
| (10.7) |
В обозначениях (10.1) – (10.5) имеем
x(t) = ξ(t); u(t) = μ(t); A = -α; B =![]() ; R1 = 1; R2 = ρ. (10.8)
; R1 = 1; R2 = ρ. (10.8)
Подставляя (10.8) в (10.5), получим:
| (10.9) |
Из (10.9) определим Р. Будем иметь:
| (10.10) |
Определим матрицу F из (10.4). Получим:
| (10.11) |
или
| (10.12) |
Таким образом,
μ(t) =−F*ξ(t). (10.13)
Подставим (10.13), (10.12) в (10.6). Будем иметь:
|

или
Система, поведение которой описывается таким уравнением, является асимптотически устойчивой, т. к. получена с учетом минимума функционала (10.2).
Рассмотрим другую методику решения задачи синтеза оптимального управления заданным объектом на основе моделирования процессов в комплексной области [2] и сравним подходы между собой.
Перепишем уравнения (10.6) , (10.11) в виде:
| (10.14) |
Применим к функциям преобразование Лапласа, будем иметь:
| (10.15) |
Из первого уравнения выразим X(s).Получим:
Зарисуем схему конструируемой САР.
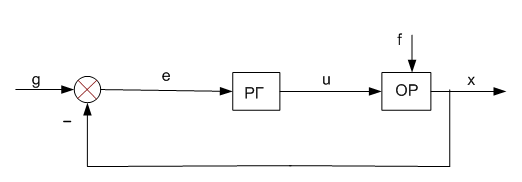
Рис. 10.1. САР стабилизации угловой скорости
Здесь передаточная функция объекта регулирования имеет вид:
В качестве регулятора возьмем безынерционное звено с передаточной функцией:
![]()
Задача синтеза стабилизирующего управления предполагает определение значения k1, при котором выполняется первая теорема Ляпунова. На этом и будет строиться решение. Для этого найдем передаточную функцию САР, получим:

Для асимптотической устойчивости САР необходимо, чтобы корень характеристического уравнения был отрицательным, т. е.

Что выполнимо, если
 (10.16)
(10.16)
Напомним, что по условию задачи ![]() - известные константы. Характеристическое уравнение САР имеет вид:
- известные константы. Характеристическое уравнение САР имеет вид:

Поскольку по нему уже было принято решение для обеспечения устойчивости САР, воспользуемся им, и подставим вместо k1 величину ![]() с учетом (10.16), при условии, что
с учетом (10.16), при условии, что  Подставим полученные результаты в U(t), которая согласно схеме имеет вид:
Подставим полученные результаты в U(t), которая согласно схеме имеет вид:
![]()
| (10.17) |
Подставим (10.17) в (10.15). Будем иметь:
| (10.18) |
Откуда следует, что для стабилизации управления достаточно обеспечивать уравнение динамики вида:
![]()
Система, поведение которой описывается таким уравнением, является асимптотически устойчивой, т. к. уравнение получено с учетом выводов первой теоремы Ляпунова.
Сравнение результатов двух независимых методик синтеза оптимального управления на данном примере показало, что результаты полностью совпали, но методика на основе моделирования процессов в s - области выглядит более значимой с точки зрения придания САУ желаемых свойств. Поскольку помимо устойчивости методика позволяет устанавливать требуемое быстродействие. Вторым важным моментом сравнения следует отметить элементарность расчетов и, следовательно, их высокую точность.
Задача 10.2. Рассмотрим задачу оптимальной стабилизации [3] для системы вида:
| (10.19) |
где x1(t), x2(t) – фазовые координаты, u(t) – управляющее воздействие.
Найти вид стабилизирующего управления u(t) = - F*x(t).
Решение. Применим методику моделирования процессов в s - области.
К системе уравнений (10.19) применим преобразование Лапласа, получим:
| (10.20) |

Построим схему для уравнений (10.20).
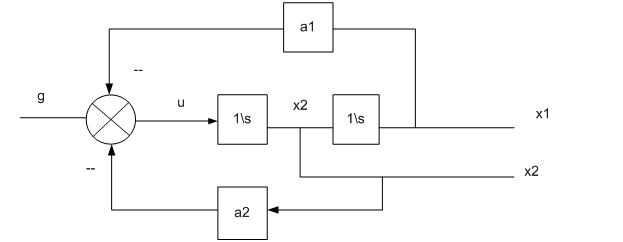
Рис. 10.2. САР оптимальной стабилизации
В схему в обратные связи добавлены безынерционные звенья с параметрами а1 и а2 соответственно, выполняющие функции управления за счет перенастройки параметров.
Найдем передаточные функции от входа к выходам, получим:
Выпишем характеристическое уравнение:
![]()
Его можно представить: (s - s1) (s - s2) = 0,
где s1, s2 - корни уравнения. Положим корни эталонной САР равными s1 = s2 = -1. Тогда характеристическое уравнение примет вид:
(s + 1) * (s + 1) = s2 + 2s + 1 = 0.
Сформируем целевую функцию на основе минимизации среднеквадратичной ошибки аппроксимации. Запишем

Для того, чтобы реальная САР (рис. 10.2) работала устойчиво достаточно, чтобы а1 = 1 , а2 = 2.
Найдем U(s) по схеме рис. 10.2., будем иметь:

Проанализируем качество синтезированной САР по расположению корней характеристического уравнения. Будем иметь:
степень устойчивости -
![]()
колебательность процессов -

время переходного процесса –
Для поиска решения на основе моделирования процессов в s - области потребовалось выполнение следующих действий:
· применить преобразование Лапласа к исходной системе
уравнений;
· построить функциональную схему САР, введя регулятор в
контур управления;
· определить характеристического уравнения САР;
· задать эталонные корни характеристического уравнения с
учетом требования устойчивости;
· по эталонным корням восстановить характеристическое
уравнение эталонной САР;
· построить целевую функцию F(x);
· решить задачу оптимизации, т. е. найти оптимальные
значения параметров а1, а2;
· проанализировать динамику САР, работающую согласно
синтезированному управлению.
Рассмотрим решение поставленной задачи на основе применения уравнения Риккати. В качестве критерия оптимальности выберем функционал:

Будем искать вид стабилизирующего управления по форме:
u(t) = - F*x(t).
Применим уравнение Риккати. Определим расчетные матрицы:
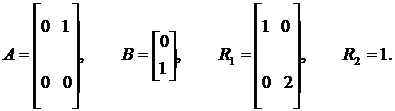
Подставим их в уравнение (10.5), получим:
|
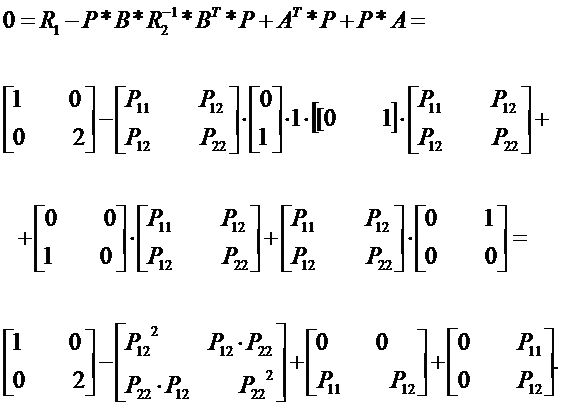
Сложим элементы матриц друг с другом, соблюдая порядок равенства индексов элементов матриц. Составим уравнения на основе приравнивания к нулю элементов матрицы, получим:
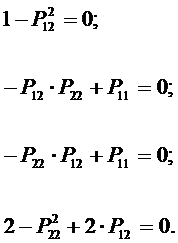
Анализ уравнений показывает, что второе и третье уравнения линейно зависимые. Поэтому оставим только три линейно независимых уравнения, получим:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
