

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
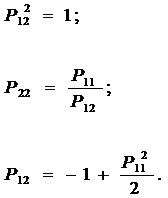
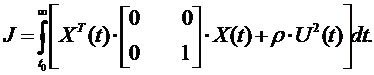
Как показывает анализ, имеем дело с системой нелинейных алгебраических уравнений, которая может быть решена численным градиентным методом поиска экстремума целевой функции. Чтобы его применить, обозначим переменные следующим образом:

Составим целевую функцию в виде:
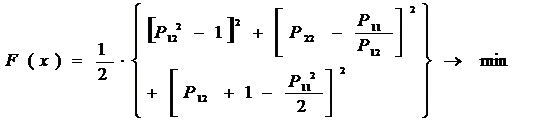
Минимизация целевой функции позволила получить следующий результат:

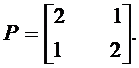
Если результат округлить с точностью до 0.003, получим:

Проверка ручного счета с помощью пакета программ matcad, позволила получить те же результаты:
|
Поставим полученную матрицу в формулу (10.4), будем иметь:
|

Подставим последнюю формулу в (10.3), получим:
|

Таким образом, оптимальное управление будет обеспечиваться согласно полученному закону. Отметим, что для проверки ручного счета было сделано обращение к пакету стандартных математических программ matcad, что удобно в проектировании, но неудобно в процессе выработки оптимального управления в режиме реального времени.
Задача 10.3. Система управления положением.
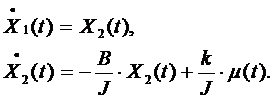
Движение антенны может быть описано дифференциальным уравнением:
| (10.21) |
Здесь J – момент инерции всех вращающихся элементов конструкции, включая антенну; В – коэффициент вязкого трения; τ(t ) – момент, развиваемый двигателем. Предполагается, что момент, развиваемый двигателем, пропорционален входному напряжению μ(t) , т. е.
τ(t) = k*μ(t) .
Определим переменные состояния:
![]()
Запишем дифференциальное уравнение состояния в виде:
|
или
| (10.22) |

где
|

Критерий оптимальности имеет вид:
| (10.23) |

Определить оптимальное управление U(t) и устойчивость замкнутой системы.
Решение. В обозначениях (10.1) – (10.5) имеем:
| (10.24) |
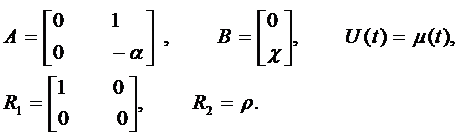
Подставляя (10.24) в (10.5), получим:
| (10.25) |
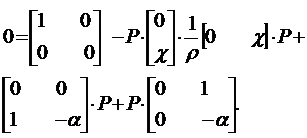
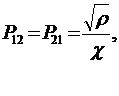
Пусть Рij, (i, j =1,2) обозначают элементы матрицы Р. Тогда, учитывая
Р12 = Р21, получим из (10.25) следующее выражение:
| (10.26) |
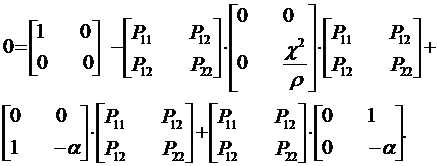
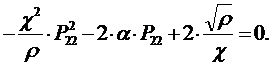
Из (10.26) получим следующие алгебраические уравнения:
| (10.27) |
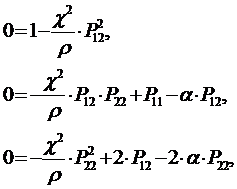
Уравнения получены с учетом того, что матрица будет равна 0, если каждый элемент матрица будет равен нулю. Здесь были найдены все элементы матрицы 2*2, и каждый ее член был приравнен к 0. Четвертое уравнение окаалось выражденным случаем с нулевой правой частью. При этом было использовано правило произведения матриц:

Из (10.27) определим Р11, Р12, Р22. Будем иметь:
| (10.28) |
| (10.29) |
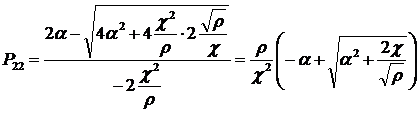
| (10.30) |

Определим матрицу F из соотношения (10.4). Получим:
| (10.31) |

Соотношение (10.31) с учетом (10.28) и (10.29) примет вид
Таким образом
μ(t) = − F ⋅ x(t
Подставим (10.31), (10.32) в (10.22). Получим:
|

или
| (10.33) |
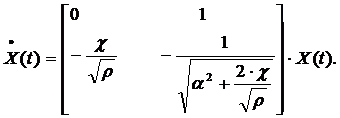
Таким образом, оптимальная замкнутая система описывается уравнением
(10.33). Введем обозначение
| (10.34) |
Определим характеристический полином замкнутой системы. Получим:
|
Характеристическое уравнение имеет вид:
| (10.35) |
Определим корни характеристического уравнения. Будем иметь:
| (10.36) |

или
| (10.37) |
Следовательно, оптимальная замкнутая система устойчива.
Задачи для самостоятельного решения
Задача 10.4. Рассмотрим спутник, который вращается относительно
своей оси симметрии. Угловое положение спутника в момент t обозначим
через ϕ(t) , а постоянный момент инерции спутника – через J. С помощью
газовых струй к спутнику может быть приложен вращающий момент μ(t) ,
который рассматривается как управляющее воздействие системы. Трение
отсутствует. Определяя переменные состояния:
![]()
запишем дифференциальное уравнение состояния в виде:
| (10.38) |
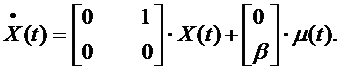
где
X(t) = [X1 (t) X2 (t)], β = 1 \ J.
Критерий оптимальности имеет вид:
| (10.39) |

Определить оптимальный закон управления:
μ(t) = − F ⋅ x(t)
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.5. Система описывается дифференциальным уравнением
состояния вида:
| (10.40) |
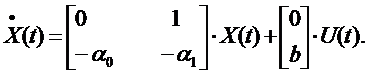
где
x(t) = [x1 (t) x 2 (t)]T
Критерий оптимальности имеет вид:
| (10.41) |

Параметры α0, α1, ρ, b имеют значения:
α0 = 2; α1 = 1; ρ = 0,002; b = 0,787.
Определить оптимальный закон управления:
u (t) = − F ⋅ x(t)
и проверить оптимальную замкнутую систему на устойчивость.
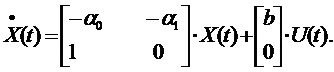
Задача 10.6. Система описывается дифференциальным уравнением
состояния вида:
| (10.41) |

где
x(t) = [x1 (t) x 2 (t)]T.
Критерий оптимальности имеет вид:
| (10.42) |

Определить оптимальный закон управления
u (t ) = − F ⋅ x(t )
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.7. Система описывается дифференциальным уравнением
состояния вида:
| (10.43) |

где
x(t) = [x1 (t) x 2 (t)]T.
Критерий оптимальности имеет вид:
| (10.44) |

Определить оптимальный закон управления:
u (t ) = − F ⋅ x(t )
и проверить оптимальную замкнутую систему на устойчивость.
Задача 10.8. Система описывается дифференциальным уравнением
состояния вида:
| (10.45) |
где
x(t) = [x1 (t) x 2 (t)]T
Критерий оптимальности имеет вид:
| (10.46) |
Определить оптимальный закон управления:
u (t ) = − F ⋅ x(t )
и проверить оптимальную замкнутую систему на устойчивость.
11. Стохастическое линейное оптимальное регулирование
Теоретические сведения
Рассмотрим систему:
| (11.1) |

где x0 – стохастический вектор со средним значением
![]()
и матрицей дисперсий Q0 . Наблюдаемая переменная описывается выражением:
y (t) = Cx(t) + w2 (t), t ≥ t
Совместный случайный процесс w(t) = [w1 (t) w2 (t)]T является белым шу -
мом с интенсивностью:
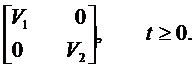
| (11.3) |
Тогда задача стохастического линейного оптимального регулирования с обратной связью по выходной переменной является задачей нахождения такого функционала:
u (t) = f [y (τ), t 0 ≤ τ ≤ t ], t 0 ≤ t ≤ t1 , (11.4)
при котором критерий:
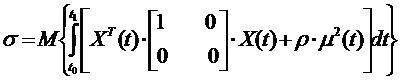
| (11.5) |

достигает минимума. Здесь R1, R2 – симметрические весовые матрицы, такие, что R1 > 0, R2 > 0, t0 ≤ t ≤ t1.
Запишем решение задачи стохастического линейного регулирования
с обратной связью по выходной переменной. Для входной переменной
имеем:
| (11.6) |
где
| (11.7) |
Здесь P – решение уравнения Риккати:
| (11.8) |
Оценка x(t) получается как решение уравнения:
| (11.9) |

где
| (11.10) |
Матрица дисперсий Q является решением уравнения Риккати:
| (11.11) |
Решение типовых задач
Задача 11.1. Система управления положением описывается диффе-
ренциальным уравнением вида:
| (11.12) |

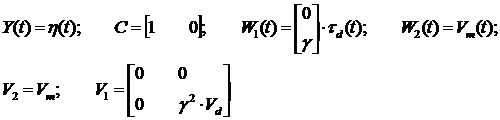
где Х (t) = [Х1 (t) Х2 (t)]Т; τ d (t) – белый шум с постоянной скалярной интенсивностью Vd. Предположим, что наблюдаемая переменная определяет-
ся выражением:
| (11.13) |
где νm(t) – белый шум с постоянной скалярной интенсивностью Vm.
Критерий оптимальности имеет вид:
| (11.14) |

определить u(t), K0.
Решение. В обозначениях (11.1) – (11.11) имеем
| (11.15) |
Подставляя (11.15) в (11.8), получим:
| (11.16) |
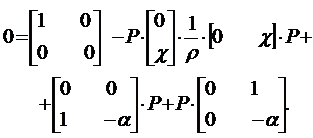
Пусть Рij, (i, j = 1,2) обозначают элементы матрицы Р. Тогда, учитывая Р12 = Р21, получим из (11.16)
| (11.17) |
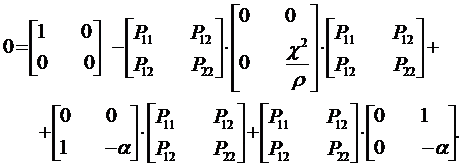
Сложим элементы матриц друг с другом, соблюдая порядок равенства индексов элементов матриц. Составим уравнения на основе приравнивания к нулю элементов матрицы, получим следующие алгебраические уравнения:
| (11.18) |
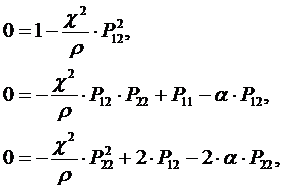
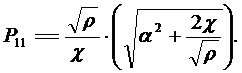
Из (11.18) определим Р11, Р12, Р22. Будем иметь
| (11.19) |
| (11.20) |
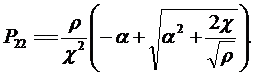
| (11.21) |
Определим матрицу F0 из соотношения (11.7). Получим:
| (11.22) |
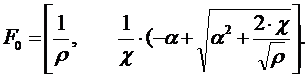
Соотношение (11.22) с учетом (11.19), (11.20) примет вид:
| (11.23) |
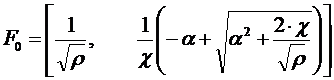
Таким образом:
| (11.24) |
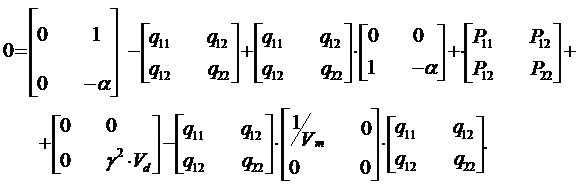
Используя (11.11), определим Q. Пусть qij, (i, j = 1,2) обозначают элементы
матрицы Q. Тогда, учитывая q12 = q21, получим из (11.11) следующее уравнение:
|

или
| (11.25) |
Из (11.25) получим следующие алгебраические уравнения:
| (11.26) |
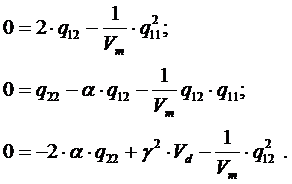
Из (11.26) определим q11, q12, q22. Получим:
| (11.27) |
| (11.28) |
| (11.29) |
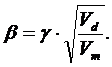
где
| (11.30) |
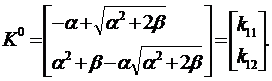
Определим матрицу K0 из (11.10). Будем иметь:
| (11.31) |
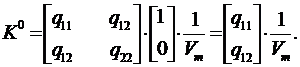
Соотношение (11.31) с учетом (11.27), (11.28) примет вид:
| (11.32) |
Из (11.9) имеем:
| (11.33) |
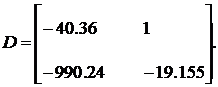
Определим матрицу D вида:
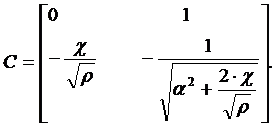
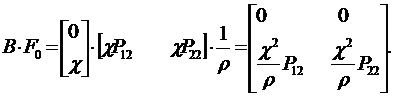
D = A – K0C – BF0. (11.34)
Будем иметь:
|
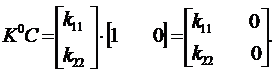
|
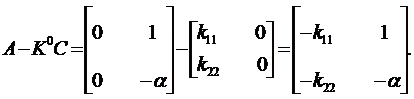

Примем следующие численные значения параметров:
χ = 0,787 рад /В ⋅ с 2 ,
α = 4,6 с −1 ,
ρ = 0,00002 рад 2/ В 2 ,
γ = 0,1 кг −1 ⋅ м −2 ,
Vd = 10 Н 2 ⋅ м 2 ⋅ с,
Vm = 10 −7 рад 2 /с.
Имеем:
k11 = 40,36; k 22 = 814,34; P12 = 0,00568; P22 = 0,00047.
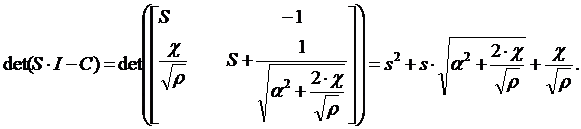
Характеристический полином матрицы D можно найти в виде
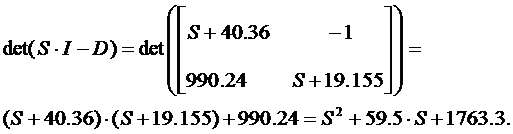
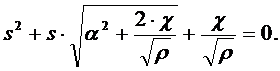
Характеристическое уравнение имеет вид:
S 2 + 59.5S + 1763.3 = 0 .
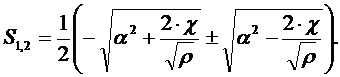
Найдем корни характеристического уравнения. Получим:
S1, 2 = −29,75 ± i59,27 .
Таким образом, система, описываемая уравнением (11.33), устойчива.
Задачи для самостоятельного решения
Задача 11.2. Система описывается дифференциальным уравнением
вида:
|

где Х (t) = [Х1 (t) Х2 (t)]Т ; τ d (t ) – белый шум с постоянной скалярной интенсивностью Vd. Предположим, что наблюдаемая переменная определяет-
ся выражением:
|
где νm(t) – белый шум с постоянной скалярной интенсивностью Vm.
Критерий оптимальности имеет вид:
|
Параметры имеют следующие значения:
β = 0.787; ρ = 0.002; γ = 0.1; Vd = 10; Vm = 10 −4 .
Определить матрицы F0, K0, проверить на устойчивость систему:

Задача 11.3. Система описывается дифференциальным уравнением
вида:
|

где Х (t) = [Х1 (t) Х2 (t)]Т; τ d (t) – белый шум с постоянной скалярной интенсивностью Vd. Предположим, что наблюдаемая переменная определяет-
ся выражением:
|
где νm(t) – белый шум с постоянной скалярной интенсивностью Vm.
Критерий оптимальности имеет вид:
|

Параметры имеют следующие значения:
β = 0.787; ρ = 0.002; γ = 0.1; Vd = 10; Vm = 10 −4 .
Определить матрицы F0, K0, проверить на устойчивость систему:

Задача 11.4. Система описывается дифференциальным уравнением
вида:
|

где Х (t) = [Х1 (t) Х2 (t)]Т; τ d (t) – белый шум с постоянной скалярной интенсивностью Vd. Предположим, что наблюдаемая переменная определяет-
ся выражением:
|
где νm(t) – белый шум с постоянной скалярной интенсивностью Vm.
Критерий оптимальности имеет вид:
|

Параметры имеют следующие значения:
![]()
Определить матрицы F0, K0, проверить на устойчивость систему:

Задача 11.5. Система описывается дифференциальным уравнением
вида:
|

где τ d (t) – белый шум с постоянной скалярной интенсивностью Vd. Наблюдаемая переменная определяется выражением:
|
где νm(t) – белый шум с постоянной скалярной интенсивностью Vm.
Критерий оптимальности имеет вид:
|
Параметры имеют следующие значения:
![]()
Определить матрицы F0, K0, проверить на устойчивость систему: 
Литература
1. , Липатов указания к
практическим занятиям по курсу «Теоретические основы
автоматизированного управления». Пермь: Перм. гос. техн. ун-т. ,
2006. – 83с.
2. Прохорова оптимизация многомерных САУ на
основе модификации метода корневого годографа. Монография. М.:
РГСУ, 2010, - 84с.
3. , , Носов теория
конструирования систем управления. М.: Высшая школа, с. 388-393.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
