

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
О ВОЗМОЖНОСТИ ПОСТРОЕНИЯ БЕСКАРДАННОГО ГИРОКОМПАСА НА ОСНОВЕ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА ДЛЯ МАЛОПОДВИЖНОГО ОСНОВАНИЯ
УДК
A. A. МЕДВЕДКОВ
(ОАО “КОНЦЕРН “ЦНИИ “ЭЛЕКТРОПРИБОР”, РОССИЯ, САНКТ-ПЕТЕРБУРГ)
О ВОЗМОЖНОСТИ ПОСТРОЕНИЯ БЕСКАРДАННОГО ГИРОКОМПАСА НА ОСНОВЕ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА ДЛЯ МАЛОПОДВИЖНОГО ОСНОВАНИЯ
В данном докладе рассматривается возможность создания бескарданного гирокомпаса на основе электростатического гироскопа в условиях малоподвижного основания. Описана структура построения гирокомпаса, режимы работы и алгоритм выработки курса. Приведены результаты моделирования в пакете MATLAB(Simulink) имитационных данных.
Введение
В настоящее время существует множество гирокомпасов, которые основаны на различных гироскопах, например на поплавковых или лазерных. Но существует ряд проблем, связанных с их использованием в условиях малоподвижного основания. В связи с этим представляет интерес анализ возможности создания гирокомпаса на основе электростатического гироскопа (ЭСГ) для наземных приложений. В данной статье описывается структура построения гирокомпаса, алгоритм выработки курса, режимы работы и приводятся результаты моделирования в пакете MATLAB (Simulink) имитационных данных. Делается вывод о требованиях к калибровке коэффициентов модели ухода ЭСГ, к уровню погрешностей списывающих устройств, а также к погрешностям акселерометров, входящих в состав гирокомпаса.
Структура построения гирокомпаса
Блок чувствительных элементов бескарданного гирокомпаса состоит из одного ЭСГ и двух акселерометров (наклономеров). При этом при начальной выставке прибора основание гирокомпаса основание гирокомпаса выставляется в плоскость горизонта. Затем корпус гироскопа поворачивается в азимуте в плоскость меридиана и поднимется приблизительно на угол широты для направления продольной оси корпуса гироскопа по оси Мира. После чего разгоняется ротор гироскопа с направлением вектора кинетического момента по продольной оси корпуса гироскопа. После начальной выставки осуществляется работа гирокомпаса в режиме калибровки с опорой на эталонные данные о курсе и координатах места. С помощью акселерометров осуществляется выработка углов наклона основания (крена и тангажа). С завершением режима калибровки происходит переход в рабочий (корректируемый) режим с опорой только на эталонные данные по координатам места.
Алгоритм выработки курса
Особенностью, описанного алгоритма ниже, является использование одного ЭСГ в качестве опорного (ЭСГ1), а второй ЭСГ формируется идеальным (ЭСГ2): погрешности его положения относительно инерциальной системы координат и коэффициенты модели ухода являются нулевыми. Приведение данных ЭСГ2 (![]() ) к, связанным с объектом, осям осуществляется с точностью до погрешностей эталонной матрицы ориентации
) к, связанным с объектом, осям осуществляется с точностью до погрешностей эталонной матрицы ориентации ![]() , которая формируется по данным о координатах места, курсе объекта (основания прибора) и углам наклона основания прибора (определяемых по данным от наклономеров).
, которая формируется по данным о координатах места, курсе объекта (основания прибора) и углам наклона основания прибора (определяемых по данным от наклономеров).

 (1)
(1)
, где ![]() - направляющие косинусы орта кинетического момента ЭСГ2 в связанных с основанием осями (
- направляющие косинусы орта кинетического момента ЭСГ2 в связанных с основанием осями (![]() ),
), ![]() - матрица, характеризующая угловое положение географического сопровождающего трехгранника (ENH) относительно осей
- матрица, характеризующая угловое положение географического сопровождающего трехгранника (ENH) относительно осей ![]() ,
, ![]() - матрица, характеризующая угловое положение осей инерциальной системы координат (ИСК) относительно осей ENH.
- матрица, характеризующая угловое положение осей инерциальной системы координат (ИСК) относительно осей ENH.
Приведение данных, полученных от ЭСГ1 в корпусных осях, к связанным осям происходит по формуле
![]() (2)
(2)
, где ![]() - направляющие косинусы орта кинетического момента ЭСГ1 в осях
- направляющие косинусы орта кинетического момента ЭСГ1 в осях ![]() ,
, ![]() - матрица, характеризующая угловое положение осей
- матрица, характеризующая угловое положение осей ![]() относительно корпусных осей ЭСГ1,
относительно корпусных осей ЭСГ1, ![]() - направляющие косинусы орта кинетического момента ЭСГ1 в корпусных осях.
- направляющие косинусы орта кинетического момента ЭСГ1 в корпусных осях.
Далее на основе данных от ЭСГ1,2, полученных из формул (1) и (2), моделируется в пространстве ортогональный гироскопический трехгранник ![]() , вычисляя текущие значения матрицы
, вычисляя текущие значения матрицы ![]() , характеризующей угловое положение трехгранника
, характеризующей угловое положение трехгранника ![]() относительно связанных с основанием гирокомпаса осей
относительно связанных с основанием гирокомпаса осей ![]() .
.
 (3)
(3)
, где ![]() - синус угла между векторами
- синус угла между векторами ![]() .
.
Прогнозирование ухода калибруемого ![]() осуществляется в инерциальной системе координат, однако расчетная модель погрешностей описана в квазиинерциальной системе координат, дискретно (в моменты коррекции положения
осуществляется в инерциальной системе координат, однако расчетная модель погрешностей описана в квазиинерциальной системе координат, дискретно (в моменты коррекции положения ![]() ) учитывающей прецессию гироскопического трехгранника
) учитывающей прецессию гироскопического трехгранника ![]() .
.
 (4)
(4)
, где ![]() - направляющий косинус орта кинетического момента ЭСГ1 в ИСК,
- направляющий косинус орта кинетического момента ЭСГ1 в ИСК, ![]() - систематический дрейф ЭСГ1.
- систематический дрейф ЭСГ1.
Положение (построение) ИСК относительно трехгранника ![]() характеризуется матрицей
характеризуется матрицей ![]() , орты-столбцы которой равны
, орты-столбцы которой равны
 (5)
(5)
где индекс ![]() - это обозначение осей ИСК для расчетных значений
- это обозначение осей ИСК для расчетных значений ![]() направляющих косинусов ортов кинетических моментов
направляющих косинусов ортов кинетических моментов ![]() .
.
Необходимые согласно алгоритму (4) расчетные значения систематических дрейфов ![]()
![]() в инерциальной системе координат пересчитываются из осей корпуса
в инерциальной системе координат пересчитываются из осей корпуса ![]() в соответствии с соотношением
в соответствии с соотношением
![]() , (6)
, (6)
где ![]() - расчетные значения матрицы ориентации,
- расчетные значения матрицы ориентации, ![]() - систематические дрейфы
- систематические дрейфы ![]() в корпусных осях.
в корпусных осях.
На данный момент, в качестве базовой принята детерминированная модель ухода ЭСГ, которая представляется в виде аналитических функций, связывающих геометрические параметры несферичного и несбалансированного ротора с параметрами физических полей – источников уводящих моментов.
![]() (7)
(7)
, где  - коэффициенты модели ухода ЭСГ1,
- коэффициенты модели ухода ЭСГ1, ![]() - коэффициенты, характеризующие консервативную часть момента от взаимодействия неравножесткого подвеса с радиально несбалансированным ротором, а коэффициенты
- коэффициенты, характеризующие консервативную часть момента от взаимодействия неравножесткого подвеса с радиально несбалансированным ротором, а коэффициенты ![]() - диссипативную часть данного момента.
- диссипативную часть данного момента.
Для выработки курса необходимо также знание матрицы ![]() направляющих косинусов, определяющей взаимную ориентацию географического сопровождающего трехгранника
направляющих косинусов, определяющей взаимную ориентацию географического сопровождающего трехгранника ![]() и ИСК, которая вычисляется по известным значениям координат места
и ИСК, которая вычисляется по известным значениям координат места
 ,
,  (8)
(8)
, где  - гринвичский часовой угол точки весеннего равноденствия (
- гринвичский часовой угол точки весеннего равноденствия (![]() - угловая скорость суточного вращения Земли).
- угловая скорость суточного вращения Земли).
Элементы искомой матрицы ![]() направляющих косинусов, определяющей взаимную ориентацию связанной
направляющих косинусов, определяющей взаимную ориентацию связанной ![]() системы координат и географического сопровождающего трехгранника
системы координат и географического сопровождающего трехгранника ![]() , могут быть вычислены в соответствии с матричным соотношением:
, могут быть вычислены в соответствии с матричным соотношением:
![]() (9)
(9)
, где ![]() - матрица направляющих косинусов, определяющая взаимную ориентацию географического сопровождающего трехгранника
- матрица направляющих косинусов, определяющая взаимную ориентацию географического сопровождающего трехгранника ![]() относительно ИСК;
относительно ИСК; ![]() - матрица, характеризующая положение (построение) ИСК относительно трехгранника
- матрица, характеризующая положение (построение) ИСК относительно трехгранника ![]() .
.
Искомое значение курса гирокомпаса вычисляется из значений элементов матрицы ![]() :
:
 , K=atan2(d12/d2
, K=atan2(d12/d2
Исходные данные для моделирования
В данной работе рассматривалось два варианта построения гирокомпаса: с модуляционным вращением с периодом 10 минут и без него. Для моделирования начальные значения погрешности привязки измерительных осей к корпусным осям ЭСГ были заданы на уровне 7..10 угл. сек. Истинные (модельные) значения коэффициентов модули ухода в осях корпуса ЭСГ были заданы :
Ko = 3.7 град/ч;
k1N = 0.5 град/ч;
k2 = -1 град/ч;
k3N = 0.2 град/ч;
k4 = 3.72 град/ч;
k5N = 0.3 град/ч;
mu = 0.2 град/ч;
nu = 0.1 град/ч;
При этом их начальные значения погрешностей находились на уровне 0.02..0.06 град/ч. Погрешность списывающих устройств (среднквадратическое отклонение) 3 угл. сек. Погрешность эталонных данных (среднеквадратическое отклонение) по курсу - , по координатам -
Результаты моделирования
Перед началом работы гирокомпаса в режиме хранения или в корректируемом режиме необходимо откалибровать коэффициенты модели ухода и привязки измерительных осей ЭСГ к его корпусным осям. В режиме калибровки используется эталонная информация о широте, долготе места, а также об углах наклона основания гирокомпаса, полученных от наклономеров и эталонное значение курса. На рисунке 2 представлен график погрешности в курсе в режиме калибровки, которая достигает в отдельных выбросах 10 угл. сек., при этом переходный процесс заканчивается примерно через 5 часов после начала моделирования.
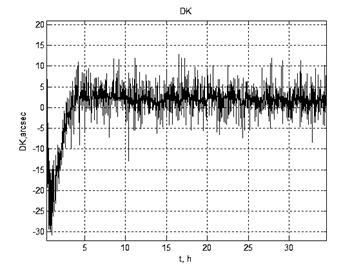
Рис. 2. Погрешность определения курса (угл. сек) в режиме калибровки на протяжении 35 часов при модуляционном вращении.
На рисунках 3,4,5 представлены ошибки оценки погрешностей коэффициентов модели ухода и погрешностей привязок измерительных осей ЭСГ к его корпусным. Так для коэффициента ko она составляет 0.01 град/ч, для коэффициента k1 0.001 град/ч, а для привязок 1..2 угл. сек.
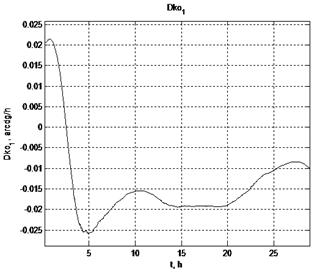
Рис. 3.Ошибка оценки погрешности коэффициента модели ухода ko (град/ч) во время калибровки на протяжении 35 часов.
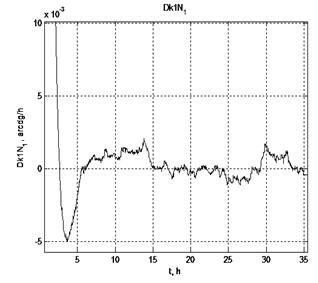
Рис. 4.Ошибка оценки погрешности коэффициента модели ухода k1 (град/ч) во время калибровки на протяжении 35 часов.
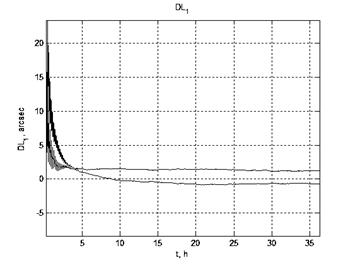
Рис. 5. Ошибки оценки погрешностей привязок (угл. сек.) измерительных осей с корпусным осям ЭСГ во время калибровки на протяжении 35 часов.
На рисунках 6 и 7 показаны результаты погрешности в курсе в режиме хранения. При этом на рисунке 6 показан результат без модуляционного вращения, а на рисунке 7 с вращение основания гирокомпаса с периодом 10 мин. Из графиков видно, что при использовании модуляционного вращения значительно уменьшается погрешность в курсе, которая достигает 60 угл. сек.
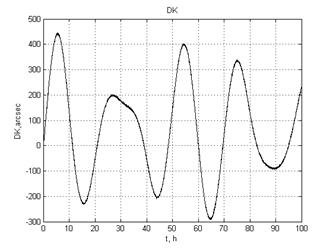
Рис. 6. Погрешность определения курса (угл. сек) в режиме хранения на протяжении 100 часов без использования модуляционного вращения.
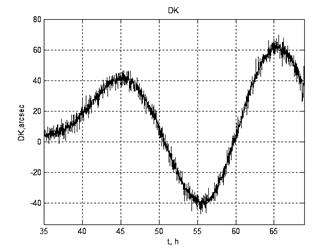
Рис. 7. Погрешность определения курса (угл. сек) в режиме хранения на протяжении 30 часов при модуляционном вращении.
На рисунке 8 приведены результаты моделирования в корректируемом режиме на протяжении 50 часов. В этом режиме происходит коррекция по эталонным данным о широте, долготе места и по углам наклона основания гирокомпаса, полученным от акселерометров. Из рисунка видно, что погрешность по курсу имеет колебательный характер с периодом около 20 часов, а её уровень со смещением в 10 угл. сек. достигает 20 угл. сек.
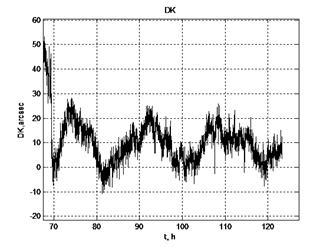
Рис. 8. Погрешность определения курса (угл. сек) в корректируемом режиме на протяжении 50 часов.
Заключение
По результатам проведенного моделирования можно судить о целесообразности создания бескарданного гирокомпаса на основе электростатического гироскопа. Для этого необходимо обеспечить модуляционное вращение корпуса ЭСГ для повышения наблюдаемости при калибровке как коэффициентов модели ухода ЭСГ, так и погрешностей привязки измерительных осей к корпусным. При этом точность калибровки коэффициентов модели ухода должна быть не хуже чем: для нормированного коэффициента k1 – 0,001 град/ч, для коэффициента ko – 0,01 град/ч. А точность калибровки привязок измерительных осей к корпусным осям ЭСГ должна быть не хуже чем 2..3 угл. сек. Для повышения точности выработки курса погрешность списывающих устройств ЭСГ не должны превышать 3 угл. сек., а погрешности измерения углов наклона основания акселерометрами должны находиться на уровне 1..2 угл. сек..
Литература
1) Анучин системы ориентации и навигации для морских подвижных объектов, / , (под общей ред. акад. РАН ) // СПб.: ЦНИИ "Электроприбор", 2003.
2) Опыт разработки двухантенной спутнико-инерциальной системы / , , [и др.] // Гироскопия и навигация.
