
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ГЛАВА VI ГИРОСКОПЫ
Новый класс инерциальных датчиков — микромеханические гироскопы (ММГ), появился в результате исследований и научно-технических разработок, выполненных в лаборатории им. Ч. Дрейпера Массачузетского технологического института (США). С отставанием по времени начались поисковые и опытно-конструкторские работы в России. В настоящее время отечественные разработчики получили действующие образцы ММГ, испытания которых показали обнадеживающие результаты. В главе рассмотрены некоторые схемы ММГ, которые исторически были предложены первыми и, кроме того, позволяют в наибольшей степени обсудить основные проблемы, связанные с разработкой гироскопов.
6.1. Гироскоп с кардановым подвесом
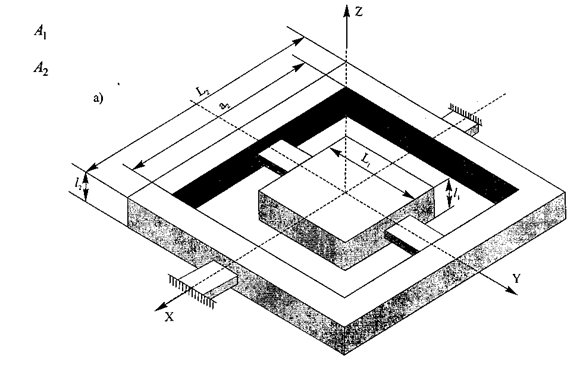
ММГ, конструктивная схема чувствительного элемента (ЧЭ) которого показана на рис. 6.1, был создан одним из первых в Лаборатории им. Ч. Дрейпера.
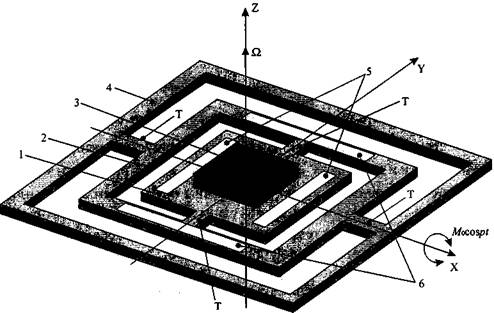
Рис. 6.1. Конструктивная схема ЧЭ ММГ с кардановым подвесом:
1 — внутренняя рамка; 2 — наружная рамка; 3 — инертная масса; 4 — корпус; 5 — электроды
емкостного датчика перемещений; 6 — электроды электростатического датчика момента.
ЧЭ гироскопа представляет вытравленную в кремниевой пластине конфигурацию карданова подвеса, состоящего из внутренней 1 и наружной 2 рамок, которые с помощью пары торсионов Т (внутренние торсионы) соединены между собой, а с помощью другой пары торсионов (наружные торсионы) — наружная рамка соединена с корпусом 4. На площадке внутренней рамки размещена масса 3, увеличивающая инерционность рамок. Жесткость на кручение торсионов вокруг осей ОХ и OY должна быть значительно меньше их жестокостей на изгиб. Электростатический моментный двигатель (датчик момента), подвижные электроды 6 которого размещены на наружной рамке (с противоположной стороны также размещена пара электродов), вокруг оси ОХ развивает переменный момент M0сospt (M0, p — амплитуда и частота момента), вследствие чего появляется переменный кинетический момент, направленный вдоль оси ОХ. Ось OZ является осью чувствительности, вокруг которой ММГ вращается с постоянной скоростью![]() , которую нужно измерять. Вследствие наличия переносной скорости
, которую нужно измерять. Вследствие наличия переносной скорости![]() , вокруг оси OY развивается переменный гироскопический момент, вызывающий угловые колебания внутренней рамки вокруг оси OY. Амплитуда и фаза угловых колебаний внутренней рамки содержат информацию о скорости
, вокруг оси OY развивается переменный гироскопический момент, вызывающий угловые колебания внутренней рамки вокруг оси OY. Амплитуда и фаза угловых колебаний внутренней рамки содержат информацию о скорости![]() и измеряются емкостным датчиком перемещений, подвижные электроды 5 которого размещены на внутренней рамке, с противоположной стороны которой также размещена пара электродов.
и измеряются емкостным датчиком перемещений, подвижные электроды 5 которого размещены на внутренней рамке, с противоположной стороны которой также размещена пара электродов.
6.1.1. Уравнения движения
При выводе уравнений движения будем учитывать конечную жесткость торсионов на кручение и изгиб, статическую несбалансированность рамок и будем полагать, что основание перемещается с линейными ускорениями. Введем следующие системы координат и обозначения (рис. 6.2). С корпусом связана система координат OXYZ, причем ось ОХ совпадает с осью кручения первой пары торсионов, а ось OY в начальный момент — с осью кручения второй пары торсионов. Основание вращается вокруг оси OZ с постоянной скоростью О, и, кроме того, поступательно перемещается с ускорениями ах, ау, az. Направление
вектора ах в «отрицательную» сторону обусловлено удобством изображения систем координат. Первый разворот карданова подвеса выполнен вокруг оси ОХ, на угол а и получена
промежуточная система координат Ох'2у'2z'2.
В силу конечной жесткости на изгиб первой пары торсионов в направлении осей OZ и
0Y под действием сил инерции, обусловленных ускорениями аz, и аy произошло смещение геометрического центра наружной рамки (т. 02), радиус — вектор ρ2 которого определен координатами у и z, т. е.![]() . С началом в т. 02 разместим систему координат О2х2у2z2, одноименные оси которой параллельны осям системы координат О2’х2’у2’z2. Ось О2у2 совпадает с осью кручения второй пары торсинов, вокруг которой выполнен разворот на угол
. С началом в т. 02 разместим систему координат О2х2у2z2, одноименные оси которой параллельны осям системы координат О2’х2’у2’z2. Ось О2у2 совпадает с осью кручения второй пары торсинов, вокруг которой выполнен разворот на угол![]() и получена система координат О2’х1’у1’z1, которая определяла бы положение внутренней рамки относительно корпуса, если бы торсионы ее подвеса обладали бесконечной жесткостью на изгиб. Однако, в силу их конечной жесткости, под действием сил инерции, обусловленных ускорениями ах и аz, произошло смещение внутренней рамки таким образом, что ее геометрический центр сместился в т. О1, определенную радиусом-вектором
и получена система координат О2’х1’у1’z1, которая определяла бы положение внутренней рамки относительно корпуса, если бы торсионы ее подвеса обладали бесконечной жесткостью на изгиб. Однако, в силу их конечной жесткости, под действием сил инерции, обусловленных ускорениями ах и аz, произошло смещение внутренней рамки таким образом, что ее геометрический центр сместился в т. О1, определенную радиусом-вектором![]() . Одноименные оси системы координат О1х1у1z1 параллельны осям О2’х1’у1’z1.
. Одноименные оси системы координат О1х1у1z1 параллельны осям О2’х1’у1’z1.
|
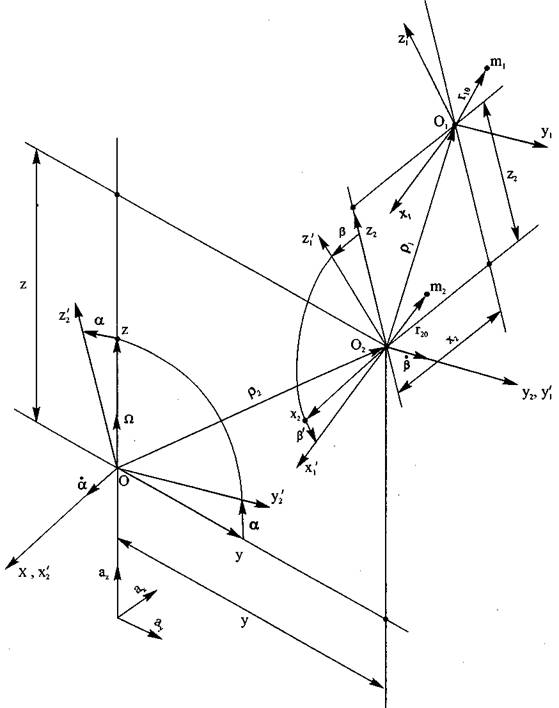
Рис. 6.2. Системы координат
Полагаем далее, что масса т2 наружной рамки сосредоточена в точке, определяемой
радиус-вектором г20 в системе координат О2х2у2z2: а масса m1внутреннейенней рамки — в точке, определяемой радиусом-вектором r10 в системе координат O1xlylzl:
|
|
. Заметим также, что компонента ускорения |
содержит и величину |
|
т. е.![]() (U — ускорение поступательного перемещения основания в направлении
(U — ускорение поступательного перемещения основания в направлении
оси Oz).
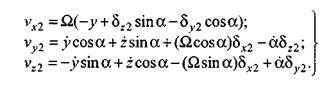
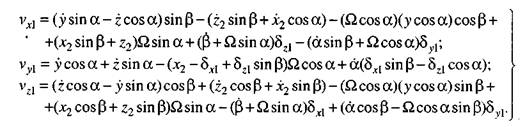
Уравнения движения ММГ получим с помощью уравнений Лагранжа второго рода. В качестве обобщенных координат выберем для наружной рамки угловую α и линейные y и z, а для внутренней рамки — угловую![]() и линейные х2 и z2.
и линейные х2 и z2.
Если пренебречь динамической несимметрией рамок, то выражение для кинетической энергии ММГ имеет вид:
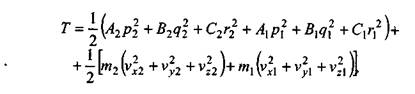 (6.1)
(6.1)
где: А2, В2, С2 — главные моменты инерции наружной рамки относительно осей
О2х2, О2у2, О2z2 соответственно;
А1, В1, С1, — главные моменты инерции внутренней рамки относительно осей О1х1, О1у1, O1z1 соответственно;
pn , qn , rn (n=2,1)— проекции абсолютных угловых скоростей наружной рамки (п = 2) на оси системы О2х2у2z2и внутренней рамки (п = 1) на оси системы O1x1y1z1;
υx2> υy2> υz2 — проекции абсолютных линейных скоростей центра масс наружной рамки на соответствующие оси;
υx1 ,υy1 ,υz1 — проекции абсолютных линейных скоростей центра масс внутренней рамки на соответствующие оси.
Потенциальную энергию ММГ определим через упругую деформацию торсионов, пренебрегая влиянием электростатического поля электродов:
 (6.2)
(6.2)
где: Gα, Gβ — жесткости торсионов на кручение по соответствующим координатам;
Gy, Gz — жесткости при изгибе торсионов подвески наружной рамки по соответствующим координатам;
Gx2, Gz2 — жесткости при изгибе торсионов подвески внутренней рамки по соответствующим координатам.
Диссипативную функцию рассеяния энергии представим в виде:
 (6.3)
(6.3)
где bα, bβ — коэффициенты «вязкого» трения при вращении наружной и внутренней рамок соответственно вокруг осей ОХ и O2Y2;
by, bz, bx2, bz2 — коэффициенты «вязкого» трения при поступательном движении наружной рамки по координатам y,zи внутренней рамки по координатам х2, z2.
Запишем систему уравнений Лагранжа 2-го рода.
Для наружной рамки:
 (6.4)
(6.4)
Для внутренней рамки:
 (6.5)
(6.5)
Определим обобщенные силы. Для наружной рамки:
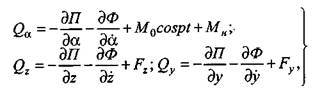 (6.6)
(6.6)
![]() где:
где:
Мн — момент сил, обусловленных разбалансом ММГ относительно оси Оух. Для внутренней рамки:
|
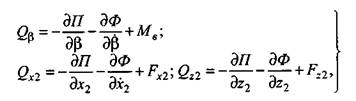
(6.7)
где:
![]()
Mв — момент сил, обусловленных разбалансом ММГ относительно оси O2Y2 . В дополнение к рис. 6.2 воспользуемся рис. 6.3 и определим моменты, обусловленные упругим и статическим смещением центров масс рамок ММГ:
|

(6.8)
Для малых значений углов![]() выражения (6.8) принимают вид: (6.9)
выражения (6.8) принимают вид: (6.9)
|
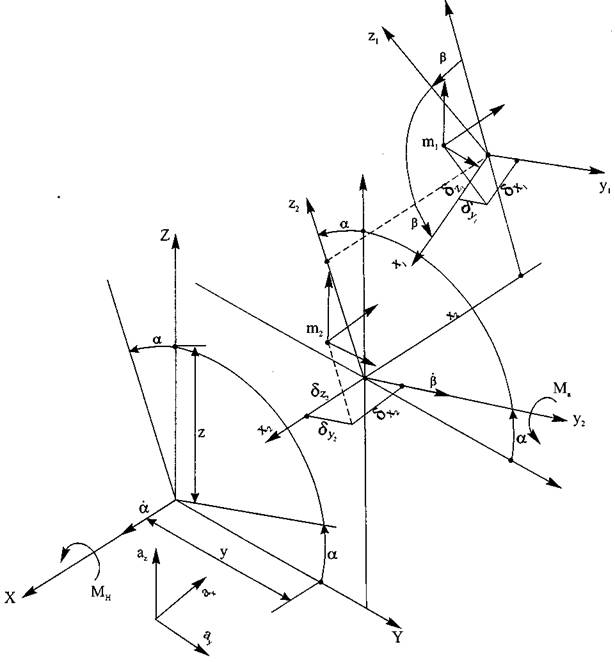
Рис. 6.3. К определению моментов разбаланса (общий случай)
*
Если в зависимостях (6.9) пренебречь составляющими, имеющими множителями величины![]() , то из них следуют выражения, которые легко проверить с помощью
, то из них следуют выражения, которые легко проверить с помощью
рис. 6.4:

|
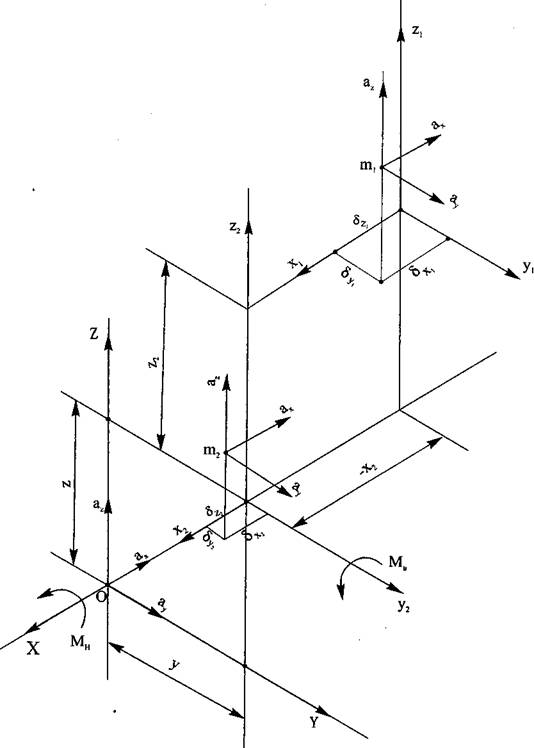
Рис. 6.4. К определению моментов разбаланса (частный случай)
Запишем проекции абсолютных скоростей гироскопа на соответствующие оси (рис. 6.2):
 (6.11)
(6.11)
(6.12)
 (6.13)
(6.13)
Выполним операции дифференцирования в соответствии с уравнениями Лагранжа (6.4,
6.5) с учетом![]() и, полгая малыми значения величин α, β
и, полгая малыми значения величин α, β![]() ,
, ![]() запишем уравнения движения:
запишем уравнения движения:
- для наружной рамки
(6.13)
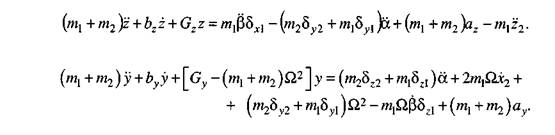 (6.14)
(6.14)

(6.15)
(6.16)
- для внутренней рамки

(6.17)
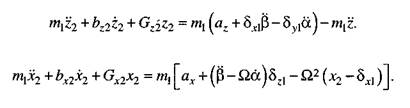
(6.18)
(6.19)
Система уравнений (6.14÷6.го порядка описывает динамику ММГ со смещенными центрами масс рамок, находящегося на вращающемся основании, перемещающемся с постоянными ускорениями. Заметим, что величины смещений δxί; δyί; δzί (i= 1,2) центров масс рамок могут быть вызваны как температурным возмущением, так и технологическими погрешностями при изготовлении рамок и сборке ММГ.
Перекрестные связи уравнений системы (6.14÷6.19) обусловлены, прежде всего, смещениями δxί; δyί; δzί (ι = 1,2) центров масс рамок. Предположим, что указанные смещения отсутствуют δxί=δyί=δzί = 0 и из системы (6.14÷6.19) получим следующие уравнения:
 (6.20)
(6.20)
![]() (6.21)
(6.21)
|
(6.22)
|
(6.23)
Левая часть уравнений (6.20) идентична уравнениям движения двухколечного роторного вибрационного гироскопа и достаточно полно исследована, в том числе и для гироскопов в микромеханическом исполнении [47, 48]. Величины Z и Z2 определяются из совместного решения системы (6.21). Очевидно, что они приводят к изменению зазоров между электродами датчика момента и емкостного датчика перемещений. Решение уравнения (6.22) может быть найдено независимо от других, а результат его решения в виде  2 используется при решении уравнения (6.23). Очевидно, что движение внутренней рамки по координате x2 и вместе с наружной рамкой по координате у может привести к изменению площадей взаимного перекрытия подвижных электродов (см. рис. 6.1) и неподвижных, размещенных в корпусе ММГ.
2 используется при решении уравнения (6.23). Очевидно, что движение внутренней рамки по координате x2 и вместе с наружной рамкой по координате у может привести к изменению площадей взаимного перекрытия подвижных электродов (см. рис. 6.1) и неподвижных, размещенных в корпусе ММГ.
6.1.2. Собственные частоты и устойчивость
Запишем уравнения (6.20) без правой части в виде:
|
(6.24)
|
где:
|
|
(6.25)
Характер собственного движения гироскопа определяется корнями характеристического уравнения, которое для системы (6.24) имеет вид:
|
где:
(6.26)
(6.27)
Если вязкое трение в гироскопе отсутствует (ζα = ζβ = 0), то уравнение (6.26) вырождается в биквадратное, корни которого:
|
где частоты незатухающих колебаний гироскопа определяются выражениями:
|

(6.28)
Решения (6.28) представим в форме:
|
(6.29]
где: j = 1,2; ω10 >ω20.
Из выражений (6.29) следует, что частоты свободных незатухающих колебаний ММГ имеют соизмеримые друг с другом значения и зависят от угловой скорости Ω основания
(рис. 6.5). В областях частот ωj0≈Ω даже при значительном изменении Ω расстройка
частот ωj0 - Ω будет незначительной.
Оценим влияние вязкого трения на частоту собственных колебаний ММГ. Представим характеристическое уравнение гироскопа в виде:
|
(6.30)
|
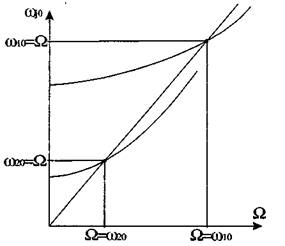
Рис. 6.5. Зависимости ωj0 =f(Ω)
Раскроем скобки и приравняем коэффициенты в уравнениях (6.26) и (6.30) при одинаковых степенях оператора s:
|
(6.31)
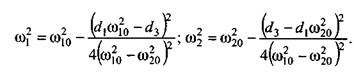
Для малых значений величин ζα,ζβ из (6.28) следует d2≈d20 и при условиях ω11 = ω10; ω22 ≈ ω20 с большой точностью выполняется вторая пара равенств. Тогда, имея
в виду приближенные равенства: ω11≈ ω10; ω22 ≈ ω20, из первых двух равенств (6.31) получим параметры:
|
(6.32)
Запишем корни уравнения (6.30):
|
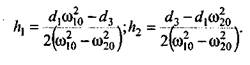
где частоты собственных колебаний ММГ при малом демпфировании определяются соотношениями:
|
(6.33)
Можно считать, что с точностью до значений hi2 (i = 1,2) частоты затухающих колебаний ММГ близки к частотам его незатухающих колебаний: ω1 ≈ ω10, ω2≈ω20.
Поступая аналогично, получим частоты собственных колебаний ММГ в его поступательных перемещениях.
Запишем характеристическое уравнение системы (6.21):
![]() (6.34)
(6.34)
|

где:
|
(6.35)
Если пренебречь демпфированием (bz = bz2 = 0), то из (6.34) следует биквадратное уравнение, корни которого s1,2 = ±i![]() ; s3,4 = ±i
; s3,4 = ±i![]() ; (i2=-1), а частоты незатухающих колебаний гироскопа в направлении оси OZ определяются выражениями:
; (i2=-1), а частоты незатухающих колебаний гироскопа в направлении оси OZ определяются выражениями:
|
(6.36)
Выражения (6.36) представим в форме:
|

(6.37)
![]() где:
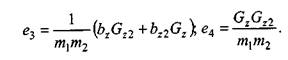
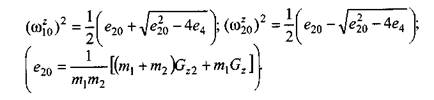
где:
Из выражений (6.37)! также как из уравнений (6.21) следует, что частоты собственных незатухающих колебаний ММГ по вертикальной координате OZ не зависят от угловой скорости Ω основания, а их числовые значения могут быть довольно значительно разнесены относительно друг друга. Например, если тх = m2, Gz = Gz2, то из (6.37) следует, что
![]()
Если справедливы предположения, что для слабого демпфирования: е2 ≈ е20 , ![]() ≈
≈ ![]() ,
, ![]() ≈
≈ ![]() то частоты собственных колебаний ММГ могут быть рассчитаны по формулам
то частоты собственных колебаний ММГ могут быть рассчитаны по формулам
(6.33), B которых следует положить d1 = e1, d3 = e3, а частоты ωz10 и ωz20 рассчитать по формулам (6.37).
Из уравнений (6.22), (6.23) следует, что частоты слабо демпфированных собственных колебаний гироскопа по координате у и x2 мало отличаются от собственных частот недемпфированных колебаний и зависят от угловой скорости Ω основания:
 (6.38)
(6.38)
Очевидно, при соблюдении условия Gx2 ≈ Gy соблюдается неравенство ω0 x2 > ω0y.
Для определения соотношений между параметрами ММГ, обеспечивающими его устойчивость, воспользуемся критериями Гурвица, которые получим из характеристического уравнения системы (6.20), представленного в виде:
|

где коэффициенты q: (j = O,... ,4) при условиях bα≈ bβ, A1 = B1, A2 = B2 определяются равенствами:
|
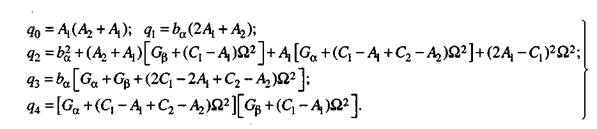
(6.39)
Условия устойчивости ММГ по Гурвицу определяются неравенствами:
![]() (6.40)
(6.40)
Очевидно, условия qj > O выполняются всегда, а соблюдение других условий (6.40) в случае ММГ целесообразно проверять в процессе его расчета.
6.1.3. Конструктивные параметры и динамическая настройка
Определим расчетные зависимости для вычисления моментов инерции рамок, жесткости упругих элементов, параметров электростатического датчика моментов и условия динамической настройки.
(6.41) |
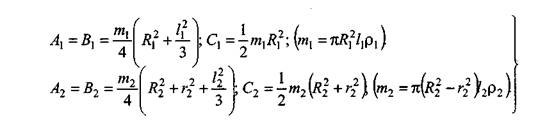
Будем считать, что форма рамок в плане может быть либо квадратная, либо круглая, а поперечные сечения рамок — прямоугольник (рис. 6.6). Для квадратных рамок (рис. 6.6 а) моменты инерции вычисляются по формулам:
Рис. 6.6. Конструкция ММГ: а — C квадратными рамками; б — с круглыми рамками.
Для круглых рамок (рис. 6.6 б) моменты инерции вычисляются по формулам:
|
(6.42)
Определим отношения моментов инерции для квадратных рамок:

Отношения моментов инерции для круглых рамок:

Для внутренних рамок возможно выполнение равенства A1 = C1, если l1 =A1 (квадратная рамка), либо l1 = √3R1 (круглая рамка).
Будем полагать, что упругий элемент (торсион) длиной lT имеет прямоугольное сечение
(bn х сn)фис.6.7.)
|
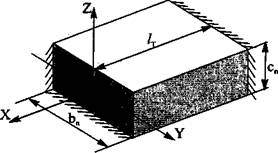
Рис. 6.7. Упругий элемент
Для такого элемента, жестко защемленного по концам (монолитное исполнение с рамками и корпусом), если пренебречь влиянием растягивающих сил в направлении оси X, жесткости на изгиб в направлении оси Z и Y определяются по формулам:
|
(6.43)
где: E — модуль упругости в соответствующем кристаллографическом направлении.
Подставим величины моментов инерции поперечного сечения
B (6.43) и получим:
|
(6.44)
Жесткость упругих элементов на кручение определяется формулой:
|
(6.45)
где: σ — модуль сдвига для кристаллографической плоскости, совпадающей с поперечным сечением элемента;
Jk = k'bncn3, (bn/cn = n ≥ l), коэффициент k' определяется из табл. 6.1.
Таблица 6.1.

Принудительные колебания наружной рамки обеспечиваются электростатическим моментом:
|
(6.46)
где: ε0 = 8,8·10-12 [Ф/м] ; S — площадь электродов наружной рамки;
Uэ — напряжение на электродах;
L2 — линейный размер рамки («плечо» силы).
Предельную оценку необходимого значения электростатического момента можно получить на основании первого уравнения системы (6.20):
|

(6.47)
где: E, p — амплитуда и частота колебаний наружной рамки.
Так как значение электростатической силы невелико, а ее увеличение возможно за счет уменьшения зазора h и увеличения напряжения Uэ, то необходимо выполнение условия Uэ < Uд (Uд — напряжение пробоя на электродах). Ha рис. 6.8 приведена зависимость*
* , Ширкевич по элементарной физике. М.:Наука, 1980. с. 205.
![]() (p — давление среды, h — зазор между электродами) для воздуха, которая справедлива также и для азота.
(p — давление среды, h — зазор между электродами) для воздуха, которая справедлива также и для азота.
|
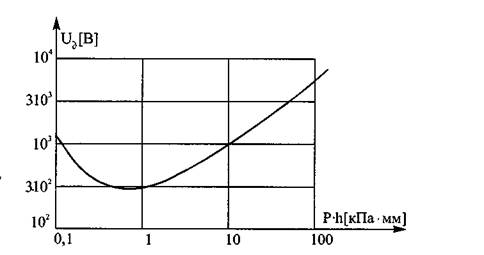
Рис. 6.8. Зависимость напряжения пробоя
для плоских металлических электродов
от величиныp-h (кПа-мм = Пам)
Для ММГ C кардановым подвесом условие динамической настройки заключается в таком подборе его параметров, при котором большая собственная частота ω10 (6.29) совпадает C частотой p принудительных (возбуждаемых) колебаний наружной рамки:
|

(6.48)
Перепишем равенство (6.48) с учетом (6.25):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
