
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 528.56
Н[1]
(ГНЦ РФ ЦНИИ «Электроприбор», С.-Петербург)
Исследование путей создания двухосного гиростабилизатора гравиметра на волоконно-оптических гироскопах.
Аннотация: Рассмотрены принципы построения двухосного гиростабилизатора гравиметра с использованием волоконно-оптических гироскопов. Приводятся результаты математического моделирования погрешностей стабилизации гравиметра на качающемся основании. Предъявлены требования к чувствительным элементам.
Введение
Для повышения точности гравиметрических съемок в условиях качающегося основания необходимо стабилизировать чувствительный элемент гравиметра в плоскости горизонта. В ОАО “Концерн “ЦНИИ “Электроприбор” разрабатываются двухосные гиростабилизаторы (ГС), построенные на основе поплавковых гироскопов (ПГ), реагирующих на угол отклонения стабилизированной платформы (СП) относительно оси стабилизации. Поплавковые гироскопы обладают приемлемыми точностными характеристиками за счет жестких технологических требований к их изготовлению, а также практически полной разгрузки опор поплавка от собственного веса, что обеспечивает ничтожно малые моменты сил сухого трения в опорах. Однако ввиду сложной технологии производства ПГ и высокой стоимости появляется необходимость применения более дешевых и конструктивно простых чувствительных элементов – волоконно-оптических гироскопов (ВОГ).
Среди преимуществ ВОГ по сравнению с поплавковыми механическими гироскопами выделяются следующие:
Ø отсутствие вращающихся механизмов в конструкции, что повышает надежность;
Ø пониженное энергопотребление и массогабаритные характеристики;
Ø малое время готовности;
Ø инвариантность к внешним ускорениям, работоспособность в условиях больших механических перегрузок.
Предлагается три различных варианта физической реализации вертикали с использованием датчиков угловой скорости. Первые два предполагают размещение ВОГ на платформе и измерение угловых скоростей погрешности стабилизации. При таком расположении ВОГ сигнал управления двигателем может быть сформирован как пропорционально угловой скорости, так и пропорционально углу отклонения. Это зависит от выбора порядка астатизма системы. В этом и заключается различие первых двух методов. Третий вариант построения гиростабилизатора предполагает размещение гироскопов на самом объекте в составе бесплатформенной инерциальной навигационной системы (БИНС.)
Предлагаемый доклад посвящен исследованию первых двух вариантов реализации двухосного ГС на ВОГ. Цель работы заключается в определении вклада ошибок чувствительных элементов и возмущающих воздействий в суммарную погрешность стабилизации. Приводятся результаты моделирования погрешностей построения вертикали на качающемся основании. По результатам моделирования предъявляются требования к характеристикам ВОГ. Также описан метод построения ГС с использованием БИНС.
Геометрия двухосного гиростабилизатора на ВОГ
Расположение блока чувствительных элементов (для первых двух вариантов ГС) на внутреннем кольце показано на рис.1.
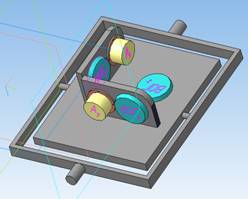 Очевидным преимуществом данной конструкции по сравнению с БИНС является то, что гироскопы работают в области низких угловых скоростей, что не приводит к искажениям их масштабных коэффициентов и сводит к нулю влияние неортогональности измерительных осей.
Очевидным преимуществом данной конструкции по сравнению с БИНС является то, что гироскопы работают в области низких угловых скоростей, что не приводит к искажениям их масштабных коэффициентов и сводит к нулю влияние неортогональности измерительных осей.
Азимутальный гироскоп используется для определения курса
в режиме гироазимута.
Акселерометры являются
Рис.1. Расположение блока ЧЭ чувствительными элементами системы
на внутреннем кольце ГС
косвенной коррекции показаний гироскопов.
Интерес представляет также комбинированный вариант построения платформы, идея которого заключается в совокупном использовании первых двух методов: выработка скоростных измерений для управления двигателем стабилизации и решение матричных уравнений Пуассона для определения углов отклонения платформы от плоскости горизонта с целью дальнейшей аналитической компенсации погрешностей. В рамках данной работы этот вариант рассматриваться не будет.
Для исключения из сигналов ВОГ переносной угловой скорости, вызванной вращением Земли относительно инерциального пространства и вращением объекта относительно центра Земли при движении его по поверхности с целью устранения систематической ошибки стабилизации, вводится схема акселерометрической коррекции.
Получим выражения составляющих угловых скоростей ошибок стабилизации, измеряемых ВОГами. Используем в качестве базовой систему координат (СК) ![]() , ориентированную по траектории (
, ориентированную по траектории (![]() - вдоль проекции линейной скорости объекта на плоскость горизонта,
- вдоль проекции линейной скорости объекта на плоскость горизонта, ![]() - по вертикали места,
- по вертикали места, ![]() дополняет
дополняет ![]() до правой), с объектом свяжем СК
до правой), с объектом свяжем СК ![]() (
(![]() - продольная ось,
- продольная ось,![]() - направлена в сторону правого борта), а с платформой, установленной на внутреннем кольце ГС, свяжем базис
- направлена в сторону правого борта), а с платформой, установленной на внутреннем кольце ГС, свяжем базис ![]() (
(![]() - ось вращения наружного кольца,
- ось вращения наружного кольца, ![]() - ось вращения внутреннего кольца,
- ось вращения внутреннего кольца, ![]() - ортогонально плоскости платформы.)
- ортогонально плоскости платформы.)
Взаимная ориентация осей ![]() объекта,
объекта, ![]() платформы и траекторной СК
платформы и траекторной СК ![]() представлена на рис.2.
представлена на рис.2.
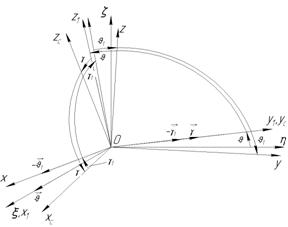 На рис.2. обозначены:
На рис.2. обозначены:
![]() - углы дифферента, крена;
- углы дифферента, крена;
 углы, снимаемые с датчиков угла по осям стабилизации, причем
углы, снимаемые с датчиков угла по осям стабилизации, причем
 ,
,
![]() - погрешности построения вертикали в поперечной и продольной осях соответственно.
- погрешности построения вертикали в поперечной и продольной осях соответственно.
Рис.2. Взаимная ориентация осей
Ввиду малости углов ![]() и
и ![]() , сигналы ВОГ, “очищенные” от переносной угловой скорости запишутся в виде:
, сигналы ВОГ, “очищенные” от переносной угловой скорости запишутся в виде:
![]() (1)
(1)
![]() - составляющие угл. скорости вращения базиса
- составляющие угл. скорости вращения базиса ![]() относительно
относительно ![]() ;
; ![]() - составляющие абсолютной угловой скорости в проекциях на оси
- составляющие абсолютной угловой скорости в проекциях на оси ![]() ;
;
![]() - матрица направляющих косинусов, характеризующая ориентацию траекторной СК
- матрица направляющих косинусов, характеризующая ориентацию траекторной СК ![]() относительно опорного географического трехгранника (ОГТ) [1];
относительно опорного географического трехгранника (ОГТ) [1]; ![]() - матрица, составленная из проекций угловых скоростей ОГТ на собственные оси;
- матрица, составленная из проекций угловых скоростей ОГТ на собственные оси;![]() матрица ошибок ВОГ.
матрица ошибок ВОГ.
Раскрыв матричное уравнение (1) и с учетом справедливости соотношений [1]
![]()
![]() ;
;  ;
;  , (2) получим следующие выражения:
, (2) получим следующие выражения:
 (3) где
(3) где ![]() ,
, ![]() - проекции абсолютной угловой скорости на оси
- проекции абсолютной угловой скорости на оси ![]() , измеряемые ВОГ с точностью до ошибок
, измеряемые ВОГ с точностью до ошибок ![]() ,
,![]() ;
; ![]() ,
,![]() - угловые скорости ошибок стабилизации. Из выражения (3) видно, что точность формирования сигнала управления определяется качеством определения составляющих широты места, линейной скорости объекта и курса, а также ошибками гироскопов в выработке динамических параметров.
- угловые скорости ошибок стабилизации. Из выражения (3) видно, что точность формирования сигнала управления определяется качеством определения составляющих широты места, линейной скорости объекта и курса, а также ошибками гироскопов в выработке динамических параметров.
Математическая модель системы стабилизации на ВОГ
На этапе математического моделирования была разработана структурная схема системы стабилизации, полученная синтезом безредукторной следящей системы (БСС) на волоконно-оптических гироскопах и схемы акселерометрической коррекции (рис.3) ![]()
 |
ВОГx
Аy
Аx
![]()
ВОГy
Рис. 3. Структурная схема системы стабилизации
![]() - угловые скорости килевой и бортовой качек;
- угловые скорости килевой и бортовой качек;  - ошибки ВОГ;
- ошибки ВОГ; ![]() - сигналы коррекции;
- сигналы коррекции;![]() - угловые скорости вращения платформы относительно корпуса; Ax, Ay – поперечный и продольный акселерометры;
- угловые скорости вращения платформы относительно корпуса; Ax, Ay – поперечный и продольный акселерометры;![]() линейные ускорения;
линейные ускорения; ![]() - ошибки акселерометров;
- ошибки акселерометров; ![]() курс,
курс, ![]() скорость, выдаваемая спутниковой навигационной системой (СНС); У1,У2 – усилители; Д1, Д2 – двигатели по осям стабилизации, Пл – платформа, СК – схема акселерометрической коррекции.
скорость, выдаваемая спутниковой навигационной системой (СНС); У1,У2 – усилители; Д1, Д2 – двигатели по осям стабилизации, Пл – платформа, СК – схема акселерометрической коррекции.
Определим ошибки БСС, вносимые в суммарную погрешность стабилизации для одного канала ГС.
Уравнение движения платформы под действием разностного момента получено по методике, описанной в [2]:
![]() (4)
(4)
где ![]() - момент инерции ротора двигателя,
- момент инерции ротора двигателя, ![]() - момент инерции ГС относительно оси вращения наружного кольца,
- момент инерции ГС относительно оси вращения наружного кольца, ![]() - возмущающий момент, действующий на платформу, определяемый как сумма момента сил вязкого трения в шарикоподшипниковой опоре двигателя и момент от небаланса, вызванного остаточной погрешностью статической балансировки,
- возмущающий момент, действующий на платформу, определяемый как сумма момента сил вязкого трения в шарикоподшипниковой опоре двигателя и момент от небаланса, вызванного остаточной погрешностью статической балансировки, ![]() - момент, прикладываемый двигателем.
- момент, прикладываемый двигателем.
С учетом справедливости следующих выражений [2]:
 (5)
(5)
соотношение для погрешности стабилизации на качающемся основании примет вид:
 (6)
(6)
где ![]() - ошибка, обусловленная отработкой управляющего воздействия
- ошибка, обусловленная отработкой управляющего воздействия ![]() ,
,
![]() - ошибка, обусловленная влиянием возмущающих моментов на оси подвеса наружного кольца ГС.
- ошибка, обусловленная влиянием возмущающих моментов на оси подвеса наружного кольца ГС.
![]() коэффициент передачи двигателя [Нм/В],
коэффициент передачи двигателя [Нм/В], ![]() - коэффициент передачи ВОГ [В/град/с],
- коэффициент передачи ВОГ [В/град/с], ![]() - управляющий сигнал [В],
- управляющий сигнал [В], ![]() - коэффициент скоростного сопротивления двигателя [Нмс],
- коэффициент скоростного сопротивления двигателя [Нмс],  - постоянная времени системы стабилизации,
- постоянная времени системы стабилизации, ![]() - передаточная функция (ПФ) разомкнутого канала БСС. Как было сказано во введении, погрешность стабилизации на качающемся основании получим для двух случаев: когда система не имеет астатизма, т. е. сигнал управления пропорционален угловой скорости. В этом случае ПФ разомкнутого канала БСС запишется в виде:
- передаточная функция (ПФ) разомкнутого канала БСС. Как было сказано во введении, погрешность стабилизации на качающемся основании получим для двух случаев: когда система не имеет астатизма, т. е. сигнал управления пропорционален угловой скорости. В этом случае ПФ разомкнутого канала БСС запишется в виде:
 , (7)
, (7)
а при наличии астатизма, т. е. когда управление пропорционально интегралу от угловой скорости ПФ БСС примет вид [2]:
 . (8)
. (8)
![]() - коэффициент усиления,
- коэффициент усиления, ![]() - добротность по угловой скорости.
- добротность по угловой скорости.
Постоянные времени БСС получены исходя из знания параметров движения носителя, при которых должна соблюдаться точность построения вертикали по методике, описанной в [1].
Результаты математического моделирования погрешностей стабилизации
На рис. 4-9 представлены результаты моделирования погрешностей БСС без астатизма. На рис. 4-5 приведены результаты моделирования ошибки ![]() .
.
Рис.4. Параметры качки: Рис.5 Параметры качки:
A=![]() , T=
, T=![]() с A=
с A=![]() , T=
, T=![]() с
с
По графикам, представленным на рис.4-5, можно определить требуемые динамический диапазон и порог чувствительности ВОГ.
На рис. 6-7 приведены результаты моделирования суммарной ошибки![]() на качающемся основании при наличии момента сил сухого трения. Причем рассмотрен самый неблагоприятный вариант – качка с периодом 20 секунд (рис.8). Устранить ошибку от момента сил сухого трения можно за счет повышения коэффициента передачи разомкнутой системы:
на качающемся основании при наличии момента сил сухого трения. Причем рассмотрен самый неблагоприятный вариант – качка с периодом 20 секунд (рис.8). Устранить ошибку от момента сил сухого трения можно за счет повышения коэффициента передачи разомкнутой системы: ![]() ,
, ![]() с сохранением устойчивости [2] (рис.7)
с сохранением устойчивости [2] (рис.7)
Рис. 6. A=![]() , T=
, T=![]() с Рис.7. A=
с Рис.7. A=![]() , T=
, T=![]() с
с
![]() Нм,
Нм, ![]()
![]() Нм,
Нм, ![]()
Зададимся следующей моделью ошибок ВОГ:  , где
, где ![]() - систематическая составляющая ошибки (дрейф нуля),
- систематическая составляющая ошибки (дрейф нуля), ![]() - случайная составляющая. Систематическую составляющую опишем в виде
- случайная составляющая. Систематическую составляющую опишем в виде  . Случайную составляющую ошибки ВОГ опишем интегралом от белого шума с уровнем шума
. Случайную составляющую ошибки ВОГ опишем интегралом от белого шума с уровнем шума ![]() [3]. Погрешность стабилизации на качающемся основании (A=
[3]. Погрешность стабилизации на качающемся основании (A=![]() , T=
, T=![]() с) с учетом ошибок ВОГ приведена на рис.8. Схема коррекции позволяет устранить систематическую ошибку стабилизации (рис.9.)
с) с учетом ошибок ВОГ приведена на рис.8. Схема коррекции позволяет устранить систематическую ошибку стабилизации (рис.9.)
Рис.8 Рис.9
На рис. 10-11 представлены результаты моделирования погрешности ![]() с астатизмом 1-го порядка. Как видно из рис.10, 11, амплитуда ошибки стабилизации на качке в системе с астатизмом 1-го порядка меняется с изменением частоты качки. В связи с этим, порог чувствительности ВОГ в этом случае должен быть уменьшен.
с астатизмом 1-го порядка. Как видно из рис.10, 11, амплитуда ошибки стабилизации на качке в системе с астатизмом 1-го порядка меняется с изменением частоты качки. В связи с этим, порог чувствительности ВОГ в этом случае должен быть уменьшен.
Рис.10. Параметры качки: Рис.11. Параметры качки:
A=![]() , T=
, T=![]() с A=
с A=![]() , T=
, T=![]() с
с
Принцип построения гиростабилизатора с использованием БИНС
Третий вариант построения ГС основан на привлечении позиционных измерений от БИНС. Cигнал управления формируется как разность углов ориентации, полученных от БИНС и снимаемых с датчика угла, характеризующего текущее положение платформы относительно корпуса прибора (рис.12).
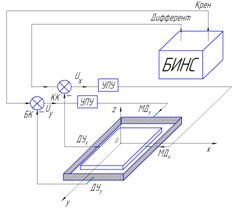
![]() - датчики углов,
- датчики углов, ![]() - моментные двигатели на оси стабилизации, УПУ – усилительно-преобразовательное устройство,
- моментные двигатели на оси стабилизации, УПУ – усилительно-преобразовательное устройство, ![]() - рассогласование
- рассогласование
углов ориентации, КК – килевая качка,
БК – бортовая качка. Достоинство
метода – низкая статическая ошибка
за счет использования позиционных
Рис. 12. Гиростабилизатор на БИНС измерений. Существенный недостаток метода – движение блока ВОГ вместе с объектом, и как следствие, искажение масштабного коэффициента и влияние неортогональности измерительных осей.
Заключение
Рассмотрены принципы построения двухосного гиростабилизатора гравиметра с использованием волоконно-оптических гироскопов.
Величины угловых скоростей, которые могут измерять ВОГи, ограничены снизу уровнем собственных шумов. Поэтому повышение точности стабилизации возможно за счет увеличения чувствительности ВОГ в области низких угловых скоростей, уменьшения уровня собственных шумов ВОГ за счет использования конструкции с замкнутым контуром.
По итогам моделирования были сформулированы следующие требования: динамический диапазон ВОГ должен быть не более ![]() , порог чувствительности – на уровне
, порог чувствительности – на уровне ![]() , уровень собственных шумов – не более
, уровень собственных шумов – не более ![]() , частота дискретизации сигнала ВОГ – не хуже 130 Гц.
, частота дискретизации сигнала ВОГ – не хуже 130 Гц.
В дальнейшем предполагается получить оптимальную ПФ схемы акселерометрической коррекции показаний ВОГ методом локальных аппроксимаций спектральных плотностей полезного сигнала и помехи.
Литература
1. , Емельянцев системы ориентации и навигации для морских подвижных объектов. Под ред. . Изд. 2-е, переработанное и дополненное. - СПб.: ГНЦ РФ – ЦНИИ “Электроприбор”, 2003. – 390 с.
2. , . Динамический синтез систем стабилизации. – Ленинград: Судостроение, 1968. – 348 с.
3. Степанов теории оценивания с приложениями к задачам обработки навигационной информации. – СПб.: ГНЦ РФ «ЦНИИ «Электроприбор»,2012. – 417 с. ISBN -012-7.
Работа проводилась при поддержке гранта РФФИ -а.
Текст доклада согласован с научным руководителем. Научный руководитель: Старосельцев работы: ЦНИИ “Электроприбор” Должность: Ведущий научный сотрудник.
Научный руководитель ведущий научный сотрудник ГНЦ РФ ЦНИИ «Электроприбор»,
