
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 2.4. Жесткий дифференциальный раскатник:
1 – ролик; 2 – опорный конус; 3 – оправка; 4 – упорный подшипник; 5 – штифт;
6 – сепаратор
Более совершенными по сравнению с вышеописанными инструментами являются сепараторные копирующие раскатники пониженной жёсткости. При изменении размеров отверстия заготовки по длине, погрешности геометрической формы (конусности, овальности и др.), биения детали и инструмента, величина натяга в процессе ППД изменяется. Преднамеренно созданная увеличенная податливость опорных элементов, на которые опираются деформирующие ролики, позволяет автоматически варьировать усилие деформирования, воздействующее на ролики. Поэтому при раскатывании деталей, точность которых не выше 3…5 класса, рекомендуется применять копирующие инструменты, конструкция которых отличается поджимом деформирующих роликов к обрабатываемой поверхности с помощью упругих элементов.
На рис. 2.5 показан копирующий раскатник для обработки отверстий НИИТракторосельхозмаша, состоящий из оправки 1, сепаратора 2, деформирующих роликов 3, опорного конуса 4, упорного подшипника 5, пружины 6 и гайки 7. При раскатывании деформирующими роликами 3 детали 8 усилие раскатывания, действующее на каждый ролик остаётся близким к постоянному, так как опорный конус 4 за счёт пружины 6 имеет возможность перемещаться в осевом направлении, изменяя в свою очередь диаметральный размер окружности, описываемой роликами, а, следовательно, сохраняет величину натяга. Копирующие инструменты обеспечивают получение качественной поверхности, но не исправляют погрешности её размеров.
Рис. 2.5. Копирующий раскатник для обработки отверстий:
1 – оправка; 2 – сепаратор; 3 – деформирующий ролик; 4 – опорный конус;
5 – упорный подшипник; 6 – пружина; 7 – гайка; 8 – обрабатываемая деталь
Сепараторные многороликовые раскатники как жесткого типа, так и копирующие, имеют преимущества, позволяющие использовать ролики малого диаметра (10…20 мм) и тем самым существенно снизить необходимые усилия деформирования. Кроме того, ролики создают удлиненный контакт, чем обеспечивается возможность увеличения подачи и снижения волнистости.
Одним из возможных решений повышения долговечности инструмента в целом является более равномерное распределение напряжений в контактных зонах между деформирующими роликами, опорным конусом и обрабатываемой деталью. В частности этого можно добиться применением конструкции раскатника представленной на рис. 2.6.
Рис. 2.6. Раскатник постоянного усилия с двумя опорными катками:
1 – оправка; 2,3 – опорные конусы; 4 – деформирующий ролик; 5 – сепаратор; 6 –заглушка; 7 – пружина; 8 – пластина; 9 – палец; 10 – толкатель; 11 – шпонка; 12 – подпятник; 13 – втулка; 14 – крышка; 15 – винт
Деформирующие ролики 4 опираются в процессе обработки на два опорных конуса 3 и 2 при помощи специально предусмотренных конических поверхностей, а усилие деформирования, действующее со стороны обрабатываемой детали, воздействует на среднюю часть роликов. За счет этого происходит перераспределение нагрузки по разным участкам роликов. Постоянное усилие деформирования создается устройством (на чертеже не показанном) расположенным на противоположном от инструмента конце борштанги. В качестве такого устройства может быть пневмо- или гидроцилиндр, применение пружины или груза и т. п. Постоянное усилие прикладывается к штоку 10 и через палец 9 передается опорному конусу 2. При смещении опорного конуса под воздействием приложенного осевого усилия влево ролики 4 перемещаются в радиальном направлении. Если конусность заднего конуса будет отличаться от конусности переднего конуса, то этим самым можно изменять задний угол внедрения ролика. Пружина 7 предназначена для возврата конуса 2 в исходное положение после снятия нагрузки в конце обработки.
Известен другой раскатник (а. с. СССР № 000) с опорным конусом, имеющим обратную конусность, в котором осевое перемещение сепаратора с роликами в рабочее положение осуществляется пружиной, воздействующей на сепаратор в направлении к большому основанию опорного конуса и упора, установленного на станке. Вывод роликов из контакта с обрабатываемой поверхностью осуществляется при упоре упорного подшипника раскатника в торец обрабатываемой детали и продольном перемещении опорного конуса относительно сепаратора до момента фиксации штока с сепаратором с помощью шариков. После чего раскатник выводят из обрабатываемого отверстия.
Известный раскатник имеет сложную конструкцию механизма ввода и вывода, состоящую из большого количества точных деталей, предназначенных для осевого перемещения сепаратора с роликами при вводе и выводе раскатника из обрабатываемого отверстия.
Цель изобретения – упрощение конструкции механизма ввода и вывода раскатника из обрабатываемого отверстия и повышение качества обрабатываемой поверхности. Указанная цель достигается тем, что механизм ввода и вывода выполнен в виде угольника, одна сторона которого, предназначенная для закрепления на суппорте станка, связана с оправкой, а другая соединена с введенной в устройство скобой, установленной на задней бабке станка. На рис. 2.7. изображено предлагаемое устройство.
Рис. 2.7. Устройство для обработки отверстий пластическим деформированием:
1 – оправка; 2 – опорный конус; 3 – сепаратор; 4 – деформирующие ролики; 5 – гайка с фланцем; 6 – гайка; 7 – пружина; 8 – вертикальная полка; 9 – угольник; 10 – горизонтальная полка; 11 – скоба; 12 – разбрызгиватель СОЖ
На оправке 1 устройства, закрепленного в задней бабке токарного станка, установлен опорный конус 2, имеющий обратную конусность, с которым взаимодействуют расположенные в сепараторе 3 деформирующие ролики 4. Между гайкой с фланцем 5, соединенной с сепаратором 3, и гайкой 6, установленной на оправке 1, расположена пружина 7. Фланец 5 гайки упирается в вертикальную полку 8 угольника 9, закрепленного на суппорте станка, а горизонтальная полка 10 угольника 9 соединена со скобой 11, установленной на задней бабке. Расстояние между правым и левым выступами скобы 11 обеспечивает перемещение суппорта относительно задней бабки на расстояние, равное длине рабочей части опорного конуса 2. С левого торца устройства расположен разбрызгивадля подачи СОЖ в зону обработки. При продольном перемещении суппорта токарного станка влево вместе с ним перемещается гайка с фланцем 5, постоянно поджимаемая к вертикальной полке 8 угольника 9 пружиной 7; гайка с фланцем 5 перемещается до тех пор, пока выступ горизонтальной полки 10 угольника 9 не коснется скобы 11. После чего устройство подводят вместе с задней бабкой станка к обрабатываемой детали и деформирующие ролики 4 своей заборной частью входят в обрабатываемое отверстие. Под действием усилия подачи, и преодолевая усилие пружины 7, сепаратор 3 перемещается относительно конуса 2 вправо до тех пор, пока диаметр описываемой роликами окружности не достигает величины натяга, при этом между гайкой с фланцем 5 и вертикальной полкой 8 угольника 9 образуется зазор. После этого происходит обработка отверстия. Через отверстие в оправке и разбрызгивав зону обработки подается СОЖ. В конце рабочего хода суппорта сообщается перемещение, обратное первоначальному, при этом вертикальная полка 8 угольника 9 за гайку с фланцем 5 перемещает сепаратор 3 с роликами 4 к меньшему диаметру опорного конуса до тех пор, пока горизонтальная полка 10 угольника 9 своим выступом не упрется в правую часть скобы 11 (на чертеже показано пунктиром). Устройство свободно выводится из отверстия. Предлагаемый раскатник проще по конструкции и более надежен в работе, в результате чего увеличивается срок его службы, а также уменьшаются затраты на его изготовление, ремонт и эксплуатацию.
На рис 2.8. представлено устройство по авторскому свидетельству № 6 предназначенное для обработки отверстий с неравномерным припуском, содержащее раскатник постоянного усилия. Деформирующие ролики раскатника 3 расположены в сепараторе 4 и взаимодействуют с опорным конусом 2, имеющим обратную конусность. На сепаратор 2 с целью создания постоянного усилия, действующего на ролики и обрабатываемую поверхность, через шток воздействует усилие груза, расположенного на г-образном рычаге. Только применение груза для создания усилия деформирования позволяет обеспечить его постоянное значение, так как, например, применение пружины создает переменное усилие пропорциональное ее деформации. Приведенная конструкция раскатного устройства была успешно внедрена в объединении Каргормаш при обработке отверстий гидроцилиндров, использующихся в шахтных гидростойках. Ее внедрение позволило повысить долговечность инструмента в 2,4 раза, при увеличении производительности в 1,8 раза и одновременном стабильном качестве обработанной поверхности.
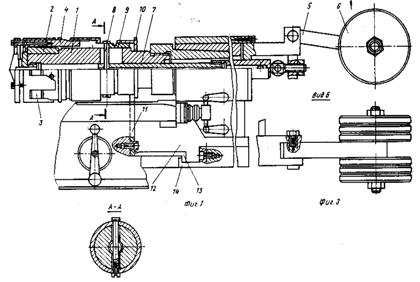
Рис. 2.8. Устройство для раскатывания глубоких гидроцилиндров
с постоянным усилием деформирования (а. с. СССР № 000):
1 – оправка; 2 – опорный конус; 3 – ролик; 4 – сепаратор; 5 – рычаг; 6 – груз; 7 – толкатель; 8 – палец; 9 – втулка; 10 – ограничитель; 11 – упор; 12 – основание; 13 – захват
Одним из методов повышения производительности является совмещение операций. Процессу раскатывания, как правило, предшествует чистовая обработка растачиванием. При совмещении растачивания и раскатывания возникает проблема не допустить проникновение стружки в зону обработки поверхностным пластическим деформированием. Одно из решений возможно на основе применения конструкции комбинированного инструмента по а. с. № 000 (рис. 2.9). Недостатком конструкций с применением многорезцовых расточных головок является необходимость предварительной настройки резцов на требуемый размер, причем каждый из резцов равнорасположенных по окружности отверстия настраивается на размер независимо от других. Это ведет к снижению точности и производительности обработки. Повышение точности и производительности достигается тем, что резцовая головка выполнена в виде набора круглых резцов и установлена на оправке совместно с раскатником посредством упорных подшипников.
Недостатком указанной конструкции является возникновение больших усилий резания. В этой связи в производство была внедрена конструкция с одним разрезным режущим резцом, контактирующим с предварительно обработанной поверхностью резцовой головкой, установленной впереди круглого резца. Роль круглого резца предназначена для тонкой зачистки предварительно обработанной резанием поверхности с целью снижения шероховатости и предотвращения попадания стружки в зону деформирования роликами.

Рис. 2.9. Комбинированный раскатник (а. с. СССР № 000):
1 – оправка; 2 – подшипник; 3 – оправка; 4 – резец круглый; 5 – направляющее кольцо; 6 – конус оправки; 7 – ролик; 8 – крышка
2.2. ЦЕНТРОБЕЖНЫЕ РАСКАТНИКИ
Всем вышерассмотренным конструкциям в той или иной степени свойственны недостатки: раскатывающие головки не универсальны, предназначены для обработки одного размера детали; конструкции сепаратора сложны и трудоёмки в изготовлении; в местах контакта рабочей поверхности деформирующих роликов со стенками сухарей или гнёзд сепараторов возникает значительное трение скольжения, что вызывает повышенный износ конструктивных элементов инструмента; в области упругого контакта между роликами и опорным конусом действуют большие контактные напряжения, приводящие к быстрому выходу из строя деформирующих роликов и опорного конуса. За счёт установки роликов под углом самозатягивания площадь упругого контакта с опорным конусом резко уменьшается, при одновременном значительном увеличении контактных напряжений.
Более предпочтительными по сравнению с рассмотренными выглядят центробежные раскатывающие инструменты, усилие деформирования которых обеспечивается за счет центробежных сил, возникающих при вращении инструмента. Одними из таких инструментов являются центробежные шариковые раскатники с применением рабочего агента – воздуха, для создания дополнительного усилия деформирования, действующего на шарики [108].
 На рис. 2.10 представлен центробежный раскатник Могилевского машиностроительного института, предназначенный для раскатывания труб гидроцилиндров. Раскатник состоит из корпуса 1, соединенного с диском 2 винтами 3. Обращенные навстречу друг к другу торцы корпуса 1 и диска 2 образуют камеру расширения, в которой установлено кольцо 4, в котором с внешней стороны выполнены сферические гнезда 5 для размещения деформирующих элементов – шаров 6. С внутренней стороны кольцо имеет лопатки 7. При работе сжатый воздух поступает в камеру расширения, где воздействует на лопатки 7, приводит во вращение кольцо 4 с размещенным в его гнездах 5 деформирующих элементов – шаров 6, обеспечивая ППД поверхности отверстия детали 8. Как видно из описания, рассмотренная выше конструкция обладает существенными недостатками. Для достижения необходимого усилия воздействия деформирующих элементов на обрабатываемую поверхность 8, развиваемого центробежными силами, необходима окружная скорость 25…50 м/с, при которой в процессе пластического деформирования, как полагает ряд авторов [10, 65] резко повышается температура, как на поверхности обрабатываемого материала, так и на деформирующих элементах. Для создания высоких скоростей вращения необходимо специальное оборудование и технологическая оснастка.
На рис. 2.10 представлен центробежный раскатник Могилевского машиностроительного института, предназначенный для раскатывания труб гидроцилиндров. Раскатник состоит из корпуса 1, соединенного с диском 2 винтами 3. Обращенные навстречу друг к другу торцы корпуса 1 и диска 2 образуют камеру расширения, в которой установлено кольцо 4, в котором с внешней стороны выполнены сферические гнезда 5 для размещения деформирующих элементов – шаров 6. С внутренней стороны кольцо имеет лопатки 7. При работе сжатый воздух поступает в камеру расширения, где воздействует на лопатки 7, приводит во вращение кольцо 4 с размещенным в его гнездах 5 деформирующих элементов – шаров 6, обеспечивая ППД поверхности отверстия детали 8. Как видно из описания, рассмотренная выше конструкция обладает существенными недостатками. Для достижения необходимого усилия воздействия деформирующих элементов на обрабатываемую поверхность 8, развиваемого центробежными силами, необходима окружная скорость 25…50 м/с, при которой в процессе пластического деформирования, как полагает ряд авторов [10, 65] резко повышается температура, как на поверхности обрабатываемого материала, так и на деформирующих элементах. Для создания высоких скоростей вращения необходимо специальное оборудование и технологическая оснастка.
Центробежный раскатник иной конструкции, применяемый в настоящее время на Московском автомобильном заводе им. Лихачева и Горьковском автомобильным заводе состоит из (рис 2.11) механического привода, включающего электродвигатель 1, шкивы 2 и 3. Шарики свободно размещаются в радиально расположенных пазах, которые по высоте смещены относительно друг друга на 0,001 м. Выпадение шариков предотвращается развальцованными краями отверстия, выполненными таким образом, что шарики выступают из корпуса не более чем на 0,5 мм. При обработке угловая скорость инерционного раскатника достигает 50 сек.-1, при которой развивается центробежная сила в пределах 140...150 Н на шарик. При помощи ременной передачи осуществляется вращение шпинделя 4 шариковой головки, на которой закреплен с помощью болта 6 сменный корпус 5 шариковой головки с тремя шариками 7. В описанных выше инерционных раскатниках применяются шары, что не позволяет осуществлять выбор их параметров, формы и размеров для достижения требуемого качества при ППД. Кроме того, как показывает опыт и приведенные выше цифры, усилия деформирования, получаемые за счет центробежных сил, в рассмотренных конструкциях недостаточны для обеспечения высокого качества получаемой поверхности и заданной величины упрочненного слоя. Следовательно, технологические возможности рассмотренных шариковых инструментов ограничены.
Современный инструмент для обработки отверстий ППД роликами имеет достаточно большую номенклатуру и делится на сепараторные и бессепараторные, ротационные, жесткие, упругого действия, центробежные. Из перечисленных центробежный инструмент более предпочтителен для обеспечения высокой производительности при заданном качестве и стабильности процесса обработки. Однако, как показывает предварительный анализ, применение центробежного раскатывания позволяет осуществить не только чистовую, но и упрочняюще-чистовую обработку, а также заданную по форме и размерам контактную зону. При этом обеспечивается конструктивная простота и технологичность изготовления инструмента. Тем не менее, для решения вопросов создания оптимальной конструкции инструмента необходимы теоретические и экспериментальные исследования, которые в настоящее время отсутствуют.
Рис. 2.11. Многошариковый центробежный раскатник упругого действия
со сменными шариковыми головками и приводом вращения:
1 – электродвигатель; 2, 3 – шкивы; 4 – шпиндель;
5 – сменный корпус; 6 – болт; 7 – шарик
Г л а в а 3
ОСОБЕННОСТИ ПРОЦЕССА И ПУТИ ПОВЫШЕНИЯ
ПРОИЗВОДИТЕЛЬНОСТИ ПРИ РЕЗАНИИ МЕТАЛЛОВ
3.1. ОСОБЕННОСТИ ПРОЦЕССА РЕЗАНИЯ
Резание металлов – очень сложный процесс, часто протекающий при высоких скоростях, температурах и давлениях, действующих на резец. Снимаемый слой металла подвергается значительным упругопластическим деформациям в результате взаимодействия его с режущим лезвием инструмента. Это сопровождается структурными изменениями в поверхностном слое детали, распространяющимися на значительную глубину, течением и разрушением снимаемого слоя, трением, большой усадкой стружки, наростом на режущем инструменте и другими явлениями. С другой стороны, большие изменения претерпевает обработанная поверхность изделия и подповерхностный слой, где возникают остаточные напряжения различных знаков и интенсивности, а также наклеп, определяющие физико-механические и эксплуатационные свойства обработанной поверхности и, тем самым, ресурс изготовляемых деталей машин, надежность и безотказность работы.
Попытки одностороннего объяснения чрезвычайно сложного процесса резания элементарными механическими схемами или на основе математической теории пластичности нельзя признать удачными. Здесь имеется еще достаточно нерешенного и неясного, хотя в последнее время получены многочисленные данные на основе теоретических расчетов. Однако грамотный технический анализ явлений на базе физики твердого тела поможет специалистам правильно ориентироваться в вопросах повышения производительности и обеспечения качества при резании.
Основой процесса резания является представление о режущем клине, внедряющемся в обрабатываемую поверхность под действием силы резания при одновременном наличии главного движения и движения подачи. Для обеспечения процесса резания необходимо, чтобы режущий клин обладал определенной геометрией, т. е. наличием переднего и заднего углов, угла в плане, угла наклона режущей кромки, достаточной твердостью инструментального материала, прочностью и другими параметрами. В процессе развития теории резания усилия многих ученых были направлены на то, чтобы обеспечить оптимальные соотношения между перечисленными выше параметрами, прочностью инструмента, производительностью обработки и качеством обработанной поверхности. Эта задача во многих случаях не может быть однозначно решена, так как улучшение одних параметров приводит к ухудшению других. Однако в настоящее время получены многочисленные результаты, приведенные в виде рекомендации в справочных и нормативных данных, по выбору инструментального материала, геометрических параметров режущего инструмента и режимов резания.
Выбор конструктивных параметров резцовой головки (диаметр, количество зубьев и длина их режущих кромок в осевом направлении) максимально возможная производительность, предельно допустимая сила резания или мощность резания, а также шероховатость обработанной поверхности являются взаимосвязанными между собой величинами. На практике основной задачей, решаемой в процессе резания, является повышение производительности при обеспечении прочностных свойств режущего клина и качества поверхности детали. Эта задача может решаться различными методами. Одним из наиболее доступных и простых методов повышения производительности является правильный выбор инструментального материала, основное свойство которого заключается в соблюдении неравенства Ни >>Нд, указывающего, что твердость инструментального материала (Ни) должна быть во много раз больше твердости материала обрабатываемой детали (Нд). Это условие не всегда удается удовлетворить по двум основным причинам:
• с дальнейшим повышением научно-технического прогресса появляются новые материалы, применяемые при изготовлении деталей машин, например, жаропрочные и другие, обладающие повышенной твердостью и механическими свойствами, в то время как создание новых сверхтвердых инструментальных материалов маловероятно;
• с увеличением твердости инструментального материала возрастает его хрупкость, что ведет к вынужденному снижению производительности в силу ограничения величины подачи из-за возможного выкрашивания и поломки режущего лезвия;
• повышение скорости резания для увеличения производительности не дает удовлетворительных результатов в силу существенной интенсификации износа режущей части инструмента.
Большие перспективы могут появиться за счет применения износостойких покрытий, наносимых на режущую часть инструмента, что фактически равносильно применению новых инструментальных материалов с повышенными прочностными свойствами, т. к. сердцевина режущего клина может быть более мягкой а, следовательно, и более прочной при изгибе.
При непрерывном процессе резания, когда поверхности режущего клина соприкасаются со сбегающей стружкой и задней поверхностью детали на всем протяжении обработки, например, при токарной обработке, в зоне резания образуется высокая температура, действующая со стороны сбегающей стружки и обрабатываемой детали на режущий клин. Так как стружка и обработанная поверхность взаимодействуют непрерывно с передней и задней поверхностями режущего клина под действием значительных давлений, то это затрудняет подвод смазывающе-охлаждающей жидкости (СОЖ) непосредственно к поверхностям режущего клина. При этом в основном охлаждается деталь и удаляемая стружка. Трение стружки и обработанной поверхности детали по поверхностям режущего клина происходит в условиях практически сухого трения, что в сочетании с высокой температурой приводит к интенсивному износу.
Предлагаемые решения для более интенсивного охлаждения инструмента в основном сводятся к подаче СОЖ в зону резания под большим давлением, либо непосредственно между задней поверхностью резца и обрабатываемой деталью. Также предлагается подавать СОЖ через каналы, выполненные в теле инструмента, что не всегда возможно по технологическим соображениям изготовления инструмента и из-за особенностей его конструктивного исполнения.
Еще одним недостатком, присущим непрерывному резанию, является в ряде случаев наличие сливной стружки, которая наматывается на инструмент и деталь. Это требует остановки процесса резания для удаления стружки из зоны обработки, за счет чего снижается производительность. Различные способы стружколомания вызывают усложнения конструкции инструмента и снижают прочность режущей части.
Из всех разновидностей обработки деталей резанием наиболее сложной и трудоемкой является расточка глубоких отверстий. Трудоемкость обработки заключается в недостаточной жесткости системы инструмент–деталь, невозможности контроля над процессом резания и низкой производительности. Но одним из самых проблемных вопросов является необходимость дробления стружки и ее удаление из зоны резания и отверстия.
3.2. ПУТИ ПОВЫШЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ
ПРОЦЕССА РЕЗАНИЯ
Стремление избавиться от перечисленных в предыдущем разделе недостатков привело к созданию кинематических методов повышения производительности, прочности инструмента и повышения износостойкости, а также за счет применения многозубых лезвийных инструментов.
Кинематический метод основан на создании определенной кинематики движения инструмента, при которой режущая кромка перемещается относительно поверхностей резания, из-за чего отдельные участки режущей кромки то входят, то выходят из зоны обработки. К этим методам относятся инструменты, работающие по принципу огибания, многозубые, а также ротационные инструменты. Особенностью ротационных инструментов является наличие резцов, имеющих возможность вращения вокруг фиксированной оси. Вращение происходит принудительно или под действием сил резания. Режущая кромка этих резцов является дугой окружности или дугой фасонной поверхности. К настоящему времени накоплен определенный опыт в использовании такого инструмента, разработано большое количество различного вида инструментов, от простых резцов до торцовых фрез, работающих по принципу протягивания.
Однако, широкое внедрение этих инструментов в промышленное производство сдерживается тем, что режущие ротационные элементы устанавливаются на подшипники качения, что существенно усложняет конструкцию и увеличивает ее габаритные размеры. Главным недостатком является возникновение вибраций (подшипники качения имеют зазоры между шариками и беговыми дорожками). Кроме того, нельзя обрабатывать поверхности, имеющие буртики или перепады диаметров.
Заметное повышение производительности произошло, когда стали применяться многозубые инструменты такие, как протяжки, зенкеры, развертки, фрезы. Это связано с тем, что увеличение подачи оказалось возможным за счет распределения припуска между зубьями, в связи с чем усилие резания, приходящееся на один зуб, может быть уменьшено. Так как минутная подача равна произведению числа зубьев и подачи на зуб, то результирующая производительность за счет большого количества зубьев значительно увеличивается. Несмотря на то, что многозубые инструменты являются сложными по конструкции и дорогостоящими в изготовлении, работают с неравномерными нагрузками, они нашли широкое применение в производственной практике.
Однако не все методы обработки, известные в литературе, нашли свое воплощение в производстве. Из инструментов, применяемых для механической обработки резанием, наиболее производительным является протягивание, позволяющее за один проход протяжки полностью снимать весь припуск с обрабатываемой детали. Высокая производительность этого инструмента обусловлена наличием большого количества зубьев и значительной длиной режущих кромок, одновременно участвующих в процессе резания. При этом, для увеличения срока службы, одновременно снижают подачу на зуб и скорость резания. Подача на зуб конструктивно заложена в самой протяжке, в результате чего достаточно только одного продольного перемещения протяжки относительно детали. Главный недостаток процесса протягивания – наличие больших усилий резания.
В литературе [63] предлагаются схемы обработки цилиндрических поверхностей, использующих принцип протягивания (рис. 3.1). Для реализации принципа протягивания в предлагаемых схемах необходимо кроме главного движения и подачи обеспечить вращение инструмента. Несмотря на очевидные преимущества обработки показанных схем они не нашли широкого применения в производственной практике. В качестве станков, на которых могут применяться предложенные технологические схемы, могут быть использованы любые токарно-винторезные и горизонтально-расточные станки, для чего необходимо произвести соответствующую их модернизацию. Модернизация имеющихся типов станков позволит реализовать и другие методы обработки с применением вращающегося инструмента: фрезоточение, в том числе и с разделением припуска между резцами, упрочнение чеканкой, центробежное раскатывание и центробежное хонингование.
вихревое растачивание вихревое обтачивание
центробежное хонингование и растачивание
Рис. 3.1. Прогрессивные методы механической обработки
Повышение производительности и стойкости режущего многозубого инструмента базируется на следующих соображениях. При непрерывном точении передняя поверхность режущего клина постоянно находится в контакте со сбегающей стружкой. В начале процесса резания в рабочей зоне возникает высокая температура и в течение некоторого промежутка времени процесс является нестационарным. Как показано на рис 3.2 [61] при непрерывном точении (кривая 1) температура резания q в начале быстро возрастает, затем темп роста её снижается и, наконец, достигнув некоторого значения q = qс – стабилизируется. Если же процесс обработки остановить в момент, когда температура резания не достигла своего наибольшего значения и возобновить его после некоторого перерыва, то предельное значение температуры на поверхности инструмента будет ниже, чем qс. Снижение температуры будет тем больше, чем длительнее цикл tц = tр + tв и чем больше отношение времени вспомогательного хода tв к времени рабочего хода tр инструмента. Это видно из сопоставления кривых 2 и 3. Кривая 2 соответствует циклу, длительность которого tц = 10 с, причем tр = tв = 5 с. Кривая 3 описывает изменение температуры на контактных поверхностях инструмента в цикле длительностью tц = 33 с, причём рабочий ход и соответствующее ему повышение температуры продолжается 3 с, а вспомогательный ход и остывание резца 30 с. При механической обработке существуют операции, при которых естественно возникают перерывы в работе режущего инструмента.
Рис. 3.2. Средняя температура на контактных поверхностях инструмента при точении
заготовки из стали ШХ15 резцом с пластинкой из твердого сплава Т14К8 (v = 1,3 м/с;
t = 4∙10-3м; S = 0,5∙10-3об/мин; без охлаждения): 1 – точение непрерывное; 2 – точение прерывистое
По достижению момента tст – температура в зоне обработки достигает максимального для данных условий стационарного значения Qmax. Скольжение стружки по поверхности лезвия происходит в условиях практически сухого трения, между стружкой и лезвием имеет место схватывание и образование нароста, затрудняющих сход стружки, что вызывает увеличение касательных и нормальных составляющих силы резания. При охлаждении смазывающе-охлаждающая жидкость не в состоянии проникнуть между стружкой и передней поверхностью. При прерывистом резании в зависимости от скорости протекания процесса режущий клин не успевает нагреться до величины Q¢max и в момент t1 выходит из зоны обработки. За время прохождения резца по дуге окружности от точки t1 до точки t2 и следующего вхождения в зону обработки режущий клин охлаждается до температуры Qmin. Этот процесс периодически повторяется. Разность ![]() является резервом повышения износостойкости.
является резервом повышения износостойкости.
Для операций с прерывистым процессом резания может быть применен метод скоростного фрезерования наружных и внутренних крупномодульных резьб, который известен еще как вихревое нарезание резьбы. Для этого при расточке необходимо выбрать такую подачу и ширину резцов, чтобы весь металл срезался целиком, а не только во впадинах витков резьбы. Учитывая, что скоростное резьбофрезерование является эффективным, при условии, когда шаг нарезаемой резьбы не менее 4 мм, а эффективность этого метода в 2,5…3 раза больше по сравнению с обычным резьбофрезерованием, то его применение может значительно повысить производительность расточки отверстий. Для скоростной расточки могут использоваться токарные станки, оснащенные специальным устройством для крепления резцовой головки и приводом, осуществляющим ее вращение. Важным моментом при такой обработке является образование мелкой раздельной стружки, срезаемой отдельно каждым резцом. В этом случае стружка легко удаляется из отверстия вымыванием смазывающе-охлаждающей жидкостью. Появляется возможность автоматизации процесса обработки. Таким образом, проведенный анализ особенностей процесса резания показывает, что в настоящее время возможно повышение производительности в основном на базе выбора и обоснования новых кинематических схем резания, внедрения в производство новых прогрессивных многозубых режущих инструментов, работающих с периодическим смещением режущей кромки в зоне резания или периодической заменой работающих зубьев. Эксперименты показывают, что при этом существенно уменьшается и сила резания при одних и тех же подачах.
3.3. ОСОБЕННОСТИ ОБРАБОТКИ, РАСЧЕТ ПАРАМЕТРОВ
ИНСТРУМЕНТА ПРИ ВИХРЕВОМ РАСТАЧИВАНИИ
Для расточки отверстий существуют принципиально два различных вида инструмента: с определенностью и неопределенностью базирования (рис. 3.3). В первом случае при сложении всех составляющих сил резания, действующих на отдельные режущие лезвия инструмента, результирующее усилие теоретически должно быть равно нулю (развертки, зенкера, сверла и т. д.).

Рис. 3.3. Расточные инструменты с определенностью (а)
и без определенности (б) базирования
На практике, за счет различных отклонений, вызванных неточностью изготовления инструмента, неоднородностью материала детали, неравномерным припуском, приходящимся на каждое лезвие, этого не происходит. Возникает результирующая сила Rрез, величина и направление которой являются случайными величинами, что может привести к вибрациям, действующим на инструмент при недостаточной жесткости технологической системы. В инструментах с определенностью базирования результирующая сила находится в пределах угла ψ расположения направляющих шпонок, которые ее воспринимают, поэтому в данном случае обеспечивается лучшее качество обработки, меньше огранка и увод инструмента.
По схеме с определенностью базирования может производиться обработка скоростным фрезорастачиванием или, как указывается в некоторых литературных источниках, вихревым резанием (рис. 3.4). Обработка производится резцовой головкой 1, содержащей один или несколько режущих элементов 2. Резцовая головка установлена с возможностью вращения в борштанге 3 с частотой nи, большей, чем частота вращения детали nд, причем вращение детали может быть попутным или встречным. В процессе работы для фиксации резцовой головки 1 от смещения в поперечном направлении и предотвращения поперечных колебаний на стебле закреплены направляющие шпонки 4. Ось вращения резцовой головки смещена относительно оси заготовки на некоторую величину d, называемую эксцентриситетом, в результате чего съем металла при растачивании может происходить в зоне резания, расположенной в пределах дуги окружности обрабатываемого отверстия от точки А до точки Б. При изменении частоты вращения резцовой головки сечение срезаемого слоя будет меняться.
Рис. 3.4. Схема вихревого растачивания отверстий
1 – резцовая головка; 2 – резец-вставка; 3 – борштанга; 4 – направляющая;
5 –обрабатываемая деталь; 6 – сегмент срезаемой стружки
Параметры зоны резания: полухорда а и углы ψд и ψи (рис. 3.5) при невращающейся детали вычисляются из равенств:
![]() , (3.1)
, (3.1)
![]() (3.2)
(3.2)
 (3.3)
(3.3)
где Ro, Rз, ra – радиусы обработанного отверстия, заготовки и окружности, описываемой вершинами резцов режущей головки. При вращении детали рабочая зона увеличится в окружном направлении, в связи с чем, принимая во внимание поворот детали, формулы (3.1), (3.2) и (3.3) примут другой вид:
![]() , (3.4)
, (3.4)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
