
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пользовательские данные начинаются после этой предварительной информации. Длина поля данных составляет от 01.01.01 байт, к сообщению короче 46 байт добавляются нули. Кадр заканчивается 4-байтовой контрольной суммой. Минимальная длина данных в 46 байт была выбрана из тех соображений, чтобы полная длина кадра Ethernet, начиная с адреса получателя и кончая контрольной суммой, насчитывала по крайней мере 64 байта. С учетом начального флага общая длина пакета, таким образом, составляет 72-1526 байт. Под пользовательскими данными понимаются данные всех протоколов верхних уровней.
Метод, использованный в Ethernet для координации доступа к среде, называется множественным доступом с прослушиванием несущей и обнаружением коллизии (Carrier-Sensing Multiple Access/Collision Detection — CSMA/CD). Этот метод позволяет работать без выделенного устройства, управляющего доступом к среде. В соответствии с протоколом CSMA/CD станция, которая собирается начать передачу, должна проверить, что канал свободен — прослушивание несущей; если это условие выполнено, то станция может начать передачу. Поскольку несущую слушают все, то несколько стаций могут начать передачу одновременно — множественный доступ, В последнем случае возникает коллизия — наложение сигналов от нескольких передатчиков, которая приводит к их искажению. Поскольку метод CSMA/CD является широковещательным, т. е. все станции в сегменте "слышат" все передачи, включая свою собственную, то передатчик сразу обнаруживает коллизию, так как данные, которые он "слышит" в канале, отличаются от исходных; затем он прекращает передачу текущего кадра и начинает посылать в капал специальную комбинацию бит, называемую "затором" (jam), чтобы все станции обнаружили коллизию. Для начала новой передачи станция должна снова прослушивать несущую, при этом время прослушивания определяется случайным образом для каждой передачи в рамках некоторого ограниченного периода. Если кадр не удается передать в течение определенного времени, то передача прекращается и информация об этом передается протоколу верхнего уровня.
Другая ситуация, когда устранение ошибки не включается в протокол передачи, а переносится на более высокие уровни, возникает, если контрольная сумма, вычисленная приемником, не совпадает с полученной в кадре. Обычной стратегией является запрос па повторную передачу только тех кадров, которые оказались поврежденными; если такого запроса нет, то по умолчанию принимается, что принятый кадр правильный.
Концепция Ethernet является гибкой и открытой. Дешевые компоненты, высокие скорости передачи и переход к звездной топологии на витой паре (т. е. исключение основного недостатка шинной топологии, когда обрыв кабеля в одном месте выводит из строя всю сеть) сделали его стандартом де-факто для офисных и промышленных ЛВС. Недостатком сети, основанной на принципе CSMA/CD, является то, что вероятность коллизий возрастает с ростом числа подключенных устройств и увеличением длины сегмента. Наряду с вероятностью коллизий возрастает также время, израсходованное на повторные попытки. На практике это означает, что не существует верхней границы времени, которое может потребоваться для доступа к среде и успешной передачи сообщения. Это серьезный недостаток для промышленных приложений, работающих в реальном времени, где в некоторых случаях необходимо заранее точно знать наихудшие условия.
9.5-5. Маркерная шина (IEEE 802.4)
Локальная сеть с маркерной шиной (Token Bus) описана в спецификации IEEE 802.4. Вместе с Ethernet это один из наиболее распространенных типов локальной сети, применяемых в промышленности. В рассматриваемой системе все абоненты присоединены к сети с помощью шины (рис. 9.22). Физической средой, как и для Ethernet, является коаксиальный кабель или витая пара, поддерживающие скорость передачи данных в диапазоне 1-10 Мбит/с.
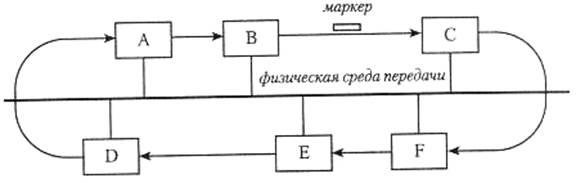
Рис. 9.22. Принцип работы маркерной шины. Маркер перемещается между станциями A-F. Станция может начать передачу, только если владеет маркером
В отличие от Ethernet и его метода случайного доступа, в сети с маркерной шиной доступ к сети осуществляется строго детерминированным образом, т. е. только одна станция в данный момент может начать передачу сообщения. Право на передачу дается маркером (token) — специальной битовой комбинацией, которая последовательно циркулирует между устройствами. Устройство, получившее маркер, имеет право на передачу в течение определенного интервала и затем должно переслать маркер следующему, Если у устройства нет данных для передачи, оно просто передает маркер дальше. Логически маркер последовательно перемещается по кольцу, хотя физической топологией является шина.
Устройства, подключенные к маркерной шине, могут быть активными и пассивными. Активные — или ведущие — устройства обмениваются маркером и могут вести передачу. Пассивные — или ведомые, подчиненные — станции могут посылать сообщения, только если к ним обращается активная станция; их ответ или подтверждение должны быть немедленными. Активные устройства обычно имеют вычислительные ресурсы, это могут быть, например, управляющие ЭВМ, контроллеры роботов, программируемые логические контроллеры и другое сложное оборудование. Пассивные устройства представляют собой датчики и другое оборудование, расположенное в непосредственной близости к физическому процессу, которое не должны передавать информацию, если об этом не поступает непосредственного запроса.
Спецификация маркерной шины предусматривает меры по управлению сетью, требующие участия всех активных устройств. Новый маркер должен создаваться, когда происходит включение всей системы, или в случае, когда станция, обладающая маркером, повредит или уничтожит его. Другие меры по управлению сетью включают изменения конфигурации, добавление или удаление станций, выявление и изоляцию поврежденных станций и т. д. Длина временного слота, т. е. промежутка времени, в течение которого каждому устройству разрешена передача, может регулироваться.
В отличие от Ethernet, в системе с маркерной шиной можно вычислить наихудшее время ожидания доступа к среде. Наибольшая задержка складывается из полного времени обращения маркера по кольцу и времени удержания маркера каждым устройством, т. е. времени, в течение которого ему разрешена передача, что соответствует максимальной длине сообщений. Для сокращения наихудшего времени ожидания слоты должны быть короткими. С другой стороны, выделенное для передачи время в результате тоже ограничивается, поэтому длинные сообщения должны разделяться на части и передаваться в виде отдельных блоков. При сокращении временного слота доступ к сети становится более быстрым, однако общая пропускная способность сети снижается. Короткие сообщения проходят быстрее, а более длинные — медленнее, так как они передаются по частям. Для достижения максимальной эффективности при выборе временного слота следует учитывать несколько факторов, в частности, число присоединенных станций, тип, частоту и приоритетность передаваемых сообщений.
• Преимущество сети с маркерной шиной для приложений с жесткими требованиями ко времени передачи в том, что все параметры процесса связи имеют детерминированный, а не вероятностный характер. Поэтому время ожидания в наихудшем случае можно с высокой точностью определить заранее. Напротив, Ethernet разрешает начать передачу сразу, как только канал свободен, но при этом нет гарантии, что это произойдет в нужный момент, особенно если количество присоединенных устройств велико.
9.5.6. Маркерное кольцо (IEEE 802.5)
Первоначально локальная сеть на основе маркерного кольца (Token Ring) была разработана корпорацией IBM. Принцип действия маркерного кольца такой же, как и маркерной шины; различие состоит в том, что в данном случае кольцо является не только логическим, но и физическим (рис. 9.23). Маркер непрерывно циркулирует по кольцу, каждая станция получает его, регенерирует и снова посылает в линию. Когда станция, имеющая сообщение для передачи, получает маркер, она удаляет его из кольца и в течение максимально разрешенного времени передает свои пакеты данных. По истечении этого времени маркер передается следующей станции. Сообщения могут передаваться вместо маркера (передатчик не отдает маркер до тех пор, пока не закончил передачу) или вместе с маркером, при этом маркер может находиться как в начале, так и в конце пакета. В спецификации IEEE 802.5 используется экранированная витая пара со скоростью передачи 4 или 16 Мбит/с. Спецификация IBM Token Ring отличается от IEEE 802.5. Она поддерживает больше функций и имеет несколько другой формат кадра.
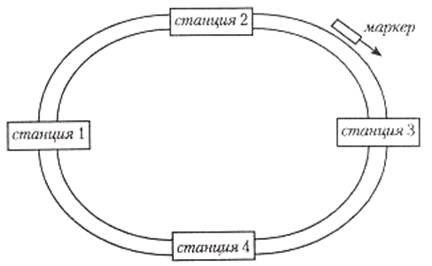 |
Каждая станция проверяет поле получателя в поступающих сообщениях. Если сообщение не предназначено для данной станции, оно передается дальше, иначе — задерживается. Способ подтверждения приема сообщения зависит от используемого протокола. Например, сообщение может циркулировать по сети до тех пор, пока оно не достигнет станции-отправителя, что рассматривается как косвенное подтверждение того, что оно также достигло станции назначения. Для того чтобы обеспечить предсказуемое время задержки, протокол доступа к среде определяет максимальное время циркуляции маркера (token rotation time), т. е. время между двумя последовательными обнаружениями свободного маркера одной и той же станции. Когда станция в кольце не включена или не готова к работе по другой причине, ее входные и выходные соединители к шине закорачиваются друг с другом через реле для того, чтобы обеспечить беспрепятственную циркуляцию сообщений по шине.
Рис. 9.23. Принцип работы маркерного кольца Маркер циркулирует между станциями. Станция может послать сообщение, только если она владеет маркером. Каждая станция распознает сообщения, предназначенные именно ей, и ретранслирует остальные дальше. Сообщение передается до тех пор, пока не достигнет отправителя
9.5.7. FDDI
Сетевой стандарт FDDI (Fiber Distributed Data Interface — оптоволоконный распределенный интерфейс данных) был разработан подкомитетом ХЗТ9.5 ANSI в 1985 году как основа для применения оптоволоконной технологии в локальных вычислительных сетях и одобрен ISO под именем ISO 9314. FDDI охватывает физический уровень и подуровень MAC канального уровня; с верхними уровнями взаимодействие осуществляется через подуровень LLC.
На физическом уровне FDDI предусмотрено использование различных носителей в зависимости от расстояния между станциями: многомодовый оптоволоконный кабель — для расстояний до 2 км, одномодовый кабель — для расстояний до 40 км, витая пара — для расстояний менее 100 м. Топология FDDI представляет собой двойное кольцо, по которому передача производится в двух направлениях. Максимальное число станций равно 500, каждая из которых присоединяется к обоим кольцам. Скорость передачи данных, определенная в FDDI, равна 100 Мбит/с.
Данные передаются по одному из колец, которое выбрано первичным (primary). В случае физического нарушения первичного кольца используется второе резервное, причем направление передачи данных изменяется на противоположное. Если оба кольца оказываются разомкнутыми в какой-либо точке из-за полного обрыва кафеля, пакеты данных направляются по оставшимся частям кольца. То же происходит В случае аварии на станции. Если кабель нарушается в нескольких местах, то каждый сегмент продолжает работать автономно, обеспечивал хотя бы частичную связь. В развитых сетях FDDI могут устанавливаться дополнительные резервные линии Между отдельными станциями.
Доступ к среде управляется маркером, как и в маркерном кольце. Протокол FDDI предусматривает автоматическое распознавание состояния и работоспособности со-единения и адаптацию к новым ситуациям, например при повреждении сети.
FDDT и Ethernet используют одну и ту же схему адресации подключенных станций, поэтому две сети можно соединить между собой с помощью мостов.
9.5.8. Межсетевые устройства
Для соединения нескольких сетей или сегментов используются так называемые межсетевые устройства (internetworking device). В зависимости от уровня модели ВОС, па котором они работают, и, соответственно, выполняемых функций эти устройства разделяются на повторители, мосты, маршрутизаторы и шлюзы. Настоящий раздел посвящен обзору таких устройств.
Повторители
Повторитель (repeater) представляет собой регенератор сигнала, соединяющий два или более сегментов сети. Любой сигнал, полученный на входной порт, регенерируется и ретранслируется па выходной порт или порты. Повторитель работает на физическом уровне и не связан с содержанием данных, которые он передает. Повторители обычно используются для увеличения максимальной длины сегментов, в частности для расширения Ethernet за пределы 500 м, или для сопряжения различных типов сред, например коаксиального и оптоволоконного кабеля при условии, что сопряжение не требует изменения формата кадров.
Из-за того что повторители не анализируют содержания данных, которые они передают, помехи воспринимаются как входные данные, и, таким образом, повторитель может генерировать и передавать бессмыслицу.
Допустимое количество повторителей в одной сети ограничено, в частности, из-за того, что они задерживают передаваемый сигнал. Для каждого метода доступа установлено ограничение на общее количество устройств и повторителей в сети. За подробностями следует обратиться к стандартам и техническому описанию, предоставляемому поставщиками оборудования.
Мосты
Мостом (bridge) называется межсетевое устройство, соединяющее между собой два сегмента одной и той же ЛВС. Основное назначение моста — фильтрация трафика между сегментами на основе аппаратных (MAC) адресов, т. е. мост работает на втором уровне модели ВОС и не учитывает протоколы верхних уровней. Попутно мост выполняет функции повторителя. Для фильтрации пакетов мост анализирует их заголовки и определяет адреса отправителя и получателя. Если отправитель и получатель находятся на одном сегменте, мост не транслирует пакет в другие сегменты. Если отправитель и получатель находятся в разных сегментах, мост регенерирует пакет и передает его в соответствующий сегмент. Таким образом мосты снижают нагрузку в сети. Обычно мосты способны настраиваться автоматически, определяя принадлежность узла с тем или иным физическим адресом к конкретному сегменту сети на основе входящего трафика. Поэтому топологию сети можно изменять без перепрограммирования мостов. Кроме этого, мост можно запрограммировать для фильтрации некоторых пакетов по определенным адресам.
В сети Ethernet, где вероятность занятости канала является экспоненциальной функцией числа присоединенных станций и средней величины их исходящего тра - фика, мосты смогут существенно повысить доступность канала, увеличивая тем самым пропускную способность сети. При этом также повышается отказоустойчивость сети, так как нарушение в одном сегменте не затронет работу других.
Для повышения эффективности сеть должна быть разделена мостами на отдельные сегменты таким образом, чтобы станции, осуществляющие между собой наиболее интенсивный обмен, находились в одном сегменте и их потоки информации были локализованы в рамках этого сегмента.
В современных сетях связи Ethernet на витой паре широко применяются устройства, Называемые коммутаторами (switch) — фактически они выполняют функции мостов.
Маршрутизаторы
Маршрутизатором (router) называется устройство, используемое для соединения
ируг с другом нескольких сетей. Маршрутизаторы работают на третьем уровне моде-
Вйи ВОС. Они распознают адреса, содержащиеся в заголовках пакетов, и осуществля-
Р>т их продвижение по сети в соответствии с этими адресами. Маршрутизаторы мо-
Цут также обеспечивать преобразование протокола и тем самым использоваться для
Вюединения сетей, работающих с различными физическими, канальными и сетевыми
протоколами (уровни 1, 2 и 3).
Различие между мостами и маршрутизаторами состоит в том, первые "видят"
Только часть сети, точнее, соединяемые ими сегменты, а маршрутизаторы должны
располагать полной моделью сети или хотя бы алгоритмом выбора маршрута для
каждого пакета. Для определения оптимального маршрута могут использоваться
Специальные алгоритмы и стратегии, например наиболее короткий маршрут, наибо-
лее быстрый или наиболее дешевый либо какой-то иной критерий.
По мере развития коммуникационных устройств и повышения их функциональ-
лгости классификационные различия между ними постоянно меняются. В частности,
шостоянно размывается граница между мостами и маршрутизаторами, поскольку
вновь разрабатываемые мосты обладают все большим количеством функций, кото-
рые раньше были присущи только маршрутизаторам.
Шлюзы
Шлюзы (gateway) используются для преобразования протоколов на верхних уровнях модели ВОС — при этом они попутно могут выполнять функции повторите-лей, мостов и маршрутизаторов, т. е. обеспечивают преобразование всего стека про-токолов. Если мосты и маршрутизаторы работают только на основании информации, содержащейся в заголовке пакета, шлюзы учитывают и содержание сообщения. На-пример, они могут осуществлять преобразование данных из одного формата в другой. Таким образом, шлюзы используются не только сетями различного типа, но и как интерфейс между приложениями. Например, в системах электронной почты шлюзы могут обеспечить перекодировку сообщений в соответствии со стандартом адресата, если он отличается от стандарта отправителя. То же относится и к программам реального времени для управления производственным процессом, если они используют различные стандарты для кодирования данных. В зависимости от конкретных требований может оказаться необходимым создание специальной шлюзовой системы, связывающей неоднородные приложения, если они не строго и не полностью соответствуют открытым стандартам коммуникаций и форматов данных.
9.6. Коммуникации в управлении техническими процессами
9.6.1. Иерархическая структура технических процессов
В большинстве процессов можно выделить несколько иерархических или административных уровней. Они более или менее соответствуют различным решениям, которые должны приниматься для управления процессом.
Рассмотрим снова в качестве примера химический реактор, описанный в разделе 2.2.1. На нижнем уровне контура регулирования температуры принимается решение, нужно или нет дополнительное тепло, чтобы поддержать температуру бака постоянной. Решение принимается регулятором на основе сравнения опорной и текущей температуры. На более высоком уровне решается, при какой температуре вести процесс. На еще более высоком уровне выбирается сам химический процесс. Очевидно, что нет смысла оптимизировать температуру для процесса типа "А", если идет процесс типа "Б". Иерархическая модель является децентрализованной — решения влияют друг на друга, но каждый уровень более или менее независим в выборе способа их реализации.
Такую же иерархическую модель можно предложить и для компании. Требования к потокам информации резко отличаются на разных уровнях управления. В общем случае все объекты, расположенные на одинаковых уровнях иерархии, интенсивно обмениваются информацией между собой; обмен данными между уровнями обычно менее интенсивен и не критичен ко времени. В целом компания может рассматриваться как строго упорядоченная система реального времени, в которой информация на каждом уровне должна обрабатываться с соответствующей скоростью. В табл. 9.1 показаны типичные объемы информации, частота ее обновления и время реакции для нужд управления на разных уровнях руководства компанией с развитыми техническими и организационными функциями. В разных компаниях имеется разное число уровней ответственности и принятия решений, своя степень зависимости уровней и степень автономности каждого административного подразделения. Количественные показатели, приведенные в табл. 9.1, должны восприниматься как ориентировочные, устанавливающие только порядок величин. Границы между уровнями можно провести иначе, а структура может относиться к другой организации, нежели производственное предприятие.
Таблица 9.1. Типичные требования к информации о процессах (все показатели — ориентировочные)
Уровень управления | Объем данных | Время реакции | Частота обновления |
Стратегическое управление | Мбайты | дни | дни |
Управление производством | Кбайты | часы, минуты, секунды | часы, минуты, секунды |
Управление участком | байты | секунды (100 мс) | секунды |
Управление процессом | биты | миллисекунды | миллисекунды |
Локальное управление (датчики, исполнительные механизмы) | биты | миллисекунды | миллисекунды |
К нижнему уровню иерархии предприятия относятся механизмы и устройства, которые непосредственно соприкасаются с процессом, — датчики и исполнительные механизмы. Это уровень локального управления (field control level) или уровень датчиков/исполнительных механизмов (sensors/actuators level). Как следует из названия, на этом уровне расположено оборудование, которое непосредственно связано с техническим процессом. На уровне управления процессом (process control level) находятся ЭВМ, регуляторы и другие "интеллектуальные" устройства, которые ведут наблюдение за процессом и управляют им с помощью датчиков и исполнительных механизмов. Уровень управления процессом являются самым нижним, на котором могут приниматься автономные решения.
Следующий, более высокий уровень — это уровень управления участком (cell control level). Этот уровень управления прямо не связан с техническими процессами, а обменивается информацией в виде опорных и текущих значений величин с выше-и нижележащими уровнями. В случае производственного участка, на котором разные станки связаны в технологическую цепочку для выполнения определенных операций, f-происходит интенсивный горизонтальный обмен данными (т. е. на одном уровне) для координации работы различных механизмов при меньшем вертикальном обмене с верхними уровнями. Действительно, для верхних уровней управления представляют интерес только поступление материалов (деталей) и потоки энергии на входе и выходе участка. На уровне управления производством (production control level) координируется деятельность нескольких участков для достижения равномерного потока материалов или энергии (выход одного производственного участка является входом для другого). Наконец, на уровне стратегического управления (management, control level) принимаются общие решения, которые влияют на работу всего предприятия.
Несмотря на вынужденную условность, иерархическая модель дает очень полезную основу для анализа и структурирования системы управления. Модель не обязательно ограничена рамками производственного предприятия; аналогичные уровни можно выделить в любой сложной системе управления. Например, в автопилоте самолета контуры управления аэродинамическими элементами и двигателями находятся на нижних уровнях иерархии, а вот вопрос, куда лететь, относится к стратегическим и оставлен на усмотрение летчика. Более того, структурирование на различных функциональных уровнях является не только академической проблемой. Определение информационных потоков между системами реального времени и административного управления является необходимой операцией для управления ресурсами
предприятия или процесса и представляет сложную техническую задачу.
9.6.2. Сбор данных и потоки информации
в управлении процессами
Требования к информационным потокам в пределах каждого из уровней иерархии могут существенно различаться. Как уже отмечалось, в системах реального времени обработка данных должна выполняться быстрее, чем происходят изменения в управляемом процессе. Похожее утверждение справедливо для процессов вообще. Естественно, что время реакции отличается на разных уровнях и увеличивается по мере повышения уровня одновременно с объемом обрабатываемой информации.
Важной чертой архитектуры системы управления является число установленных процессоров. Существуют системы управления с одним центральным процессором и системы, где их несколько. В распределенных системах разные процессоры предназначены для управления отдельными частями физического процесса; центральный процессор координирует общее функционирование. Распределение процессоров, как это следует из рис. 9.24, обычно соответствует структуре уровней управления. Количество уровней управления отличается от производства к производству.
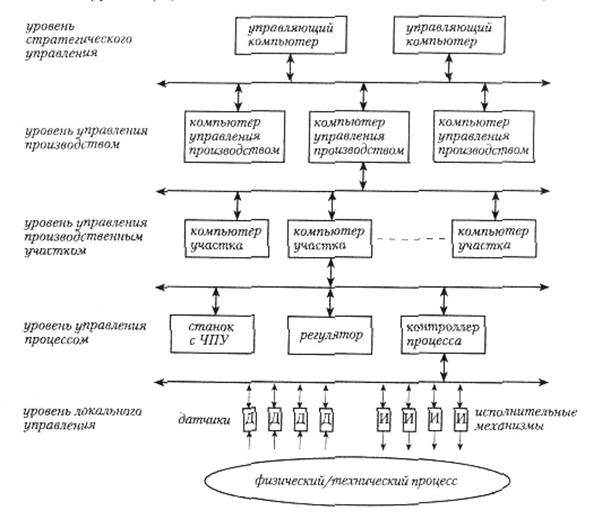
Рис. 9.24. Иерархическая структура распределенной системы управления
Периферийные процессоры или интерфейсные модули процесса напрямую связаны с физическим процессом и получают данные о нем от датчиков и аналого-цифровых преобразователей. Эти процессоры управляют процессом через исполнительные механизмы. На функции периферийных процессоров могут влиять ПЛК, местные регуляторы или другие типы устройств, связанных с процессом.
Существуют три основных способа сбора данных от датчиков и передачи их от местных регуляторов более высоким в иерархии устройствам и в центр управления.
Первый метод применяется в телеметрии. Телеметрия (telemetry) — это предпочтительный способ передачи данных от периферийных устройств к центральному в случае, когда квитирование или двунаправленная передача неудобны или вообще невозможны (например, в случае космических объектов). Все данные передаются непрерывно в заранее определенном формате. После завершения одного цикла передачи начинается новый. Каждый параметр определяется его положением в потоке данных.
На уровне управления процессом сбор данных выполняется по опросу (polling). I управляющий компьютер циклически опрашивает текущее состояние датчиков и периодически обновляет данные в своей внутренней базе данных. При опросе периферийные устройства должны отвечать управляющему компьютеру, и таким образом гарантируется периодическое обновление базы данных.
Опрос - это типовой метод, который в основном используется периферийными процессорами для получения информации от датчиков, однако иногда он применяется и центральными процессорами для обновления своих баз данных.
Третий метод заключается в передаче только тех переменных, которые изменили значение по сравнению с предыдущим циклом. Цифровые переменные передаются при каждом изменении, а для аналоговых переменных задается определенная переходная зона (раздел 5.5.1). Новая информация поступает к центральному процессору только в том случае, когда аналоговая переменная изменяется на определенный процент по отношению к предыдущему переданному значению. Более сложные методы включают передачу данных, когда интеграл отклонения измеряемой переменной достигает некоторого порогового значения. Этот метод основан на прерываниях (interrupt), которые генерируются датчиками, когда они должны передавать информацию.
Компьютеры любого уровня должны анализировать, систематизировать, обрабатывать математическими методами и сохранять собранные данные перед их передачей на более высокий уровень. Наиболее типичные математические операции, выполняемые над данными - это фильтрация, определение минимальных, максимальных и средних значений или других статистических параметров (глава 5). Таким образом, количество данных поступающих на более высокие уровни, можно уменьшить. Центральный процессор и каналы связи не должны перегружаться регистрацией и передачей статической, т. е. не меняющейся, информации.
В системах промышленной автоматики для передачи данных от датчиков к центральному устройству обычно используется комбинация второго и третьего способов, т е по опросу и прерыванию (событию). Значения переменных процесса передаются по мере их изменения; дополнительно общее обновление данных происходит через более продолжительные интервалы, например каждые несколько минут. Этот подход гарантирует что данные, используемые центром управления, в достаточной степени адекватны процессу. Образцы промышленных компьютеров для сбора Данных на уровне управления процессом/производственным участком показаны на рис. 9.25.
Вообще говоря, выбор стратегии сбора данных требует тщательного анализа как нормальных режимов работы, так и специальных случаев. Когда передаются только показания датчиков, количество информации существенно зависит от состояния и режима технического процесса. Если процесс находится в стационарном состоянии - в течение длительного времени что-либо передавать нет необходимости. Внезапное возмущение процесса, следующее, например, за изменением какого-либо опорного значения, может привести к появлению такого количества данных, что в сети возникнет перегрузка. Если измененные данные о процессе не сохранить в буфере, то часть информации может быть потеряна, и в результате центральная система будет основываться на неверной информации.
Главное преимущество комбинированного метода сбора данных заключается в том, что центральный процессор и каналы связи не перегружаются передачей статических данных. С другой стороны, если большое количество величин изменяются одновременно, то каналы связи распределенной системы могут оказаться перегруженными. Определение пропускной способности канала и мощности процессора является существенным моментом. Мощности процессора должно быть достаточно для обработки требуемого объема данных с известным запасом. Простейшее правило — использовать коэффициент запаса от 3 до 10 по отношению к минимально необходимой мощности процессора.
Рис. 9.25. Промышленные компьютеры для сбора данных — система ABB Advant
OCS: для уровня управления процессом (слева) и для уровня производственного
участка (справа) (с разрешения ABB Automation Products АВ, Швеция)
Пример 9,6
Пропускная способность канала связи
Пятнадцать периферийных процессоров и устройств сбора данных присоединены к центральному компьютеру. Двадцать каналов аналогового ввода присоединены к каждому периферийному процессору с помощью шины локального управления Fieldbus (раздел 9.7); каждый процессор присоединен с помощью FEP процессора (Front-End Processor — фронтальный процессор, специализированная ЭВМ, работающая как коммуникационный контроллер и интерфейс каналов связи; другие названия — препроцессор, процессор ввода-вывода или связной процессор), который ретранслирует поступающие данные центральному компьютеру (рис. 9.26).
Функции фронтального процессора может, в принципе, выполнить соответствующее программное обеспечение на центральном компьютере, но решение, основанное на использовании специализированных процессоров, является более предпочтительным, поскольку позволяет распределить обработку между несколькими ЭВМ.
Дискретизация аналоговых сигналов выполняется с помощью 12-разрядного АЦП 100 раз в секунду. Общее количество входной информации составляет 20 * 100 * 12 =бит/с. Локальный процессор должен быть в состоя-нии обработать этот объем данных и преобразовать их в формат для дальнейшей передачи с помощью тины Fieldbus. Принимая во внимание необходимый запас и накладные расходы на обработку, получим, что пропускная способность шины Fieldbus должна быть по крайней мере 100 Кбит/с. Если к фронтальному процессору подключено 15 устройств с одинаковыми потоками выходных данных, то общий объем для передачи составляет бит/с. С учетом необходимого запаса и накладных расходов пропускная способность магистральной сети должна составлять от 5 до 10 Мбит/с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
