


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Выполнение этапа 1. Сравним значения матриц дискретных моделей AD и BD, рассчитанных для медленного времени с интервалом отсчета Dt = 2 (ед.), а также Abound и Bbound, рассчитанных для быстрого времени с интервалом отсчета dt = 0.34 (ед.), с параметрами A и B, см. приложение 1:

Несмотря на отсутствие сходства в значениях параметров, дискретные модели удовлетворяют условию согласованности с порождающей моделью.
Собственные числа матриц AD и ADF равны:
Как видно из приведенных значений, в дискретных моделях (как и в порождающей) существуют зазоры между двумя группами собственных чисел матриц, следовательно, в объекте возможно наличие процессов с существенно различными инерционными характеристиками. Кроме того, поскольку все собственные числа лежат в круге единичного радиуса на комплексной плоскости, то дискретная модель устойчива.
Выполнение этапа 2. Рассчитываем параметр m:
![]()
Поскольку m << 1, можно предположить, что в объекте имеется свойство разнотемповости. Тестируем значение m на соответствие условию (1.29). Промежуточные вычисления приведены в приложении 1. Получено достаточное условие, определяющее m как малый параметр:
![]() .
.
Как видно из неравенства, при значении m = 0.172 данный тест дает отрицательный результат (достаточное условие не соблюдается), следовательно, необходим этап моделирования для подтверждения возможности применения метода ДШВ в данном объекте.
Проводим декомпозицию процесса на сепаратные составляющие. Для этого рассчитываем матрицы PБ и QБ с использованием Б-преобразования по формулам (1.23) и (1.25). Расчет проводится итеративно. Определить правильность расчета матриц PБ и QБ можно по скорости сходимости итеративного процесса. Для этого анализируется след матриц PБ и QБ. Такой анализ приведен на рис. 1 для цифровых данных примера из приложения 1. След матрицы удовлетворяет достаточному условию (1.30):  , см. приложение 1.
, см. приложение 1.
|
|
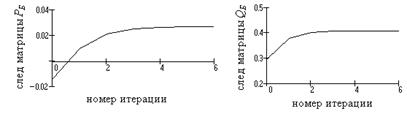
Рис. 1. Иллюстрация сходимости процедуры расчета матриц PБ и QБ
Из рис. 1 видно, что в данном примере сходимость итерационных процедур хорошая, и в качестве значений матриц PБ и QБ можно принять значения на шестой итерации:
 .
.
По полученным значениям PБ и QБ рассчитываем параметры АМ, АБ, BM, BБ и тестируем правильность расчетов: спектр собственных чисел матриц АМ, АБ, должен быть объединением спектра собственных чисел исходной матрицы объекта AD. В рассматриваемом примере:
 .
.
Проанализируем полученный результат. Построим графики исходных и сепаратных составляющих вектора состояния. На этапе подготовки к моделированию примем управляющие воздействия равными нулю, чтобы проследить, как отрабатываются начальные условия. Сравним графики процессов с «физическими» и сепаратными составляющими (рис. 2).
Как видно из рис. 2б, 2г, «физический» быстрый процесс (x3[s], x4[s]) не будет (при нулевых управлениях) равен нулю, пока не закончатся переходные процессы в медленной составляющей, поскольку через перекрестные связи (через матрицу A21) эта составляющая влияет на быстрый субпроцесс (см. рис. 2г).
Однако динамика быстрой составляющей xБ[s] после сепарации ее от медленного субпроцесса при тех же условиях почти сразу завершается (рис. 2а, 2б). Следовательно, метод ДШВ позволяет не только упростить модель объекта, но и прояснить физическую картину процесса.
|
|
|
|
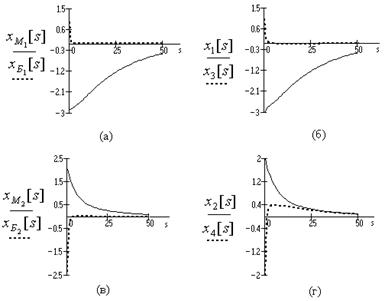
Рис. 2. Сравнение элементов вектора состояния сепаратной модели (xM[s], xБ[s])
и исходного «физического» процесса (x[s])
Тестируем правильность выполнения декомпозиции с помощью соотношений агрегирования (1.19) и (1.8) для некоторых тактов s. В рассматриваемом примере тест по (1.19) подтверждает правильность расчетов. Например, при s = 5:
 .
.
Тест по (1.18) также подтверждает правильность расчетов. Например, при s = 3:
 .
.
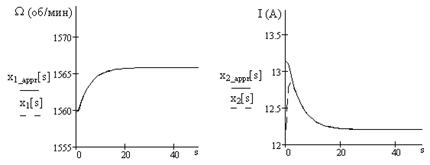
Выполнение этапа 3. На рис. 3 приведены графики, иллюстрирующие точность аппроксимации динамики объекта моделью пониженного порядка, соответствующей медленной подсистеме.
|
|
|
|
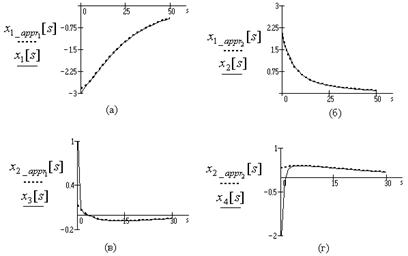
Рис. 3. Точность аппроксимации динамики объекта медленной (x1_appr[s])
и быстрой (x2_appr[s]) составляющих
Из рис. 3 следует, что точность аппроксимации медленной составляющей (рис. 3а, 3б) очень хорошая. Но точность аппроксимации быстрой составляющей (рис. 3в, 3г) на первых нескольких тактах неудовлетворительна.
Погрешность аппроксимации оценивается по средним квадратическим ошибкам. Величина этих показателей зависит от следующих факторов:
– От величины параметра m.
– От частоты смены управляющих воздействий, поскольку именно смена управляющего воздействия возбуждает собственную динамику быстрого процесса.
– От номера такта времени (при постоянных управляющих воздействиях), начиная с которого рассчитываются показатели качества. Чем этот номер больше, тем лучше значения показателей качества (со временем точность аппроксимации возрастает).
Показатели качества для медленной (JM) и быстрой (JБ) составляющих рассчитываются следующим образом:
![]() ,
,
![]() ,
,
где N – максимальное количество тактов дискретного времени; k – номер такта, начиная с которого рассчитываются показатели качества.
В рассматриваемом примере значения показателей качества равны:
при k = 0: ![]() ;
;
при k = 3: ![]() .
.
Как следует из полученных результатов, по мере удаления от начального момента времени точность аппроксимации моделью пониженного порядка возрастает.
Далее рассчитываем число отсчетов времени, входящих в пограничный слой. Для этого вводится общий показатель аппроксимации – среднее квадратическое отклонение всех компонент истинного вектора x[s] от его аппроксимации вектором xappr[s]:
![]() .
.
Как видно из рис. 4, погрешность аппроксимации со временем резко уменьшается.
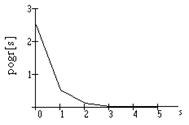
Рис. 4. Погрешность аппроксимации исходного вектора x[s]
моделью пониженного порядка xappr[s]
Используя рассчитанную величину погрешности, оценим интервал времени, в течение которого будет наблюдаться влияние собственной динамики быстрой фазы (продолжительность пограничного слоя). Способ оценки: начиная с номера такта времени, при котором величина погрешности заведомо меньше заданной погрешности e, уменьшаем в обратном времени номер такта до тех пор, пока погрешность остается меньше заданной. В результате будет определен номер такта, до которого необходимо учитывать динамику быстрой составляющей.
Величина пограничного слоя (sboundary) в рассматриваемом примере равна четырем тактам медленного времени.
Далее уточняем величину интервала дискретизации шкалы быстрого времени и пересчитываем параметры модели объекта для быстрой шкалы. Интервал дискретизации для пограничного слоя вычисляем так: nБ = Dt/dt было целым и близким к оценке  .
.
Затем параметры модели объекта пересчитываются с учетом нового интервала дискретизации и определяется количество тактов быстрого времени, приходящееся на один такт медленного времени (в примере nБ = 6).
На рис. 5 приведено сравнение истинных значений вектора состояния и его приближенной оценки в течение периода времени, входящего в пограничный слой.
|
|
|
|
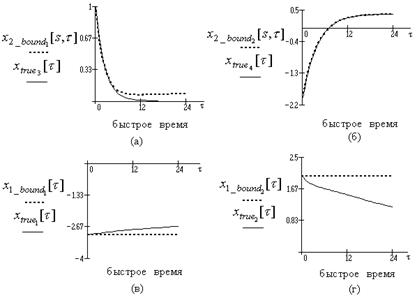
Рис. 5. Сравнение истинного значения вектора состояния (xtrue[t])
и его оценки (x1_bound[t], x2_bound[s,t]) в пограничном слое
Из рис. 5а, следует, что к концу пограничного слоя истинное значение быстрой составляющей  расходится со своей оценкой
расходится со своей оценкой ![]() . Это подтверждает предположение о том, что динамику быстрой составляющей необходимо учитывать только в начале пограничного слоя. Рис. 5в, 5г подтверждают предположение о неизменности значений медленных составляющих (x1_bound[t]) в пограничном слое.
. Это подтверждает предположение о том, что динамику быстрой составляющей необходимо учитывать только в начале пограничного слоя. Рис. 5в, 5г подтверждают предположение о неизменности значений медленных составляющих (x1_bound[t]) в пограничном слое.
Для оценки точности аппроксимации медленной составляющей константой рассчитывается относительная погрешность:
 ,
,
где sb – число тактов быстрого времени в пограничном слое.
Относительная погрешность аппроксимации медленной составляющей x1_bound[t] в рассматриваемом примере равна: ![]() . Как видно, даже в конце пограничного слоя погрешность невелика.
. Как видно, даже в конце пограничного слоя погрешность невелика.
В заключение производится сравнение погрешности аппроксимации быстрой составляющей статической (1.38) и динамической (1.39) моделью:
Результаты сравнения приведены на рис. 6.
|
|

Рис. 6. Погрешности оценивания быстрой составляющей
статической (1.38) и динамической (1.39) моделями
Как видно из рис. 6, к концу пограничного слоя точность обеих оценок сближается. На начальном участке пограничного слоя хорошо видно улучшение оценки быстрой составляющей благодаря учету ее собственной динамики.
На рис. 7 сопоставлены значения истинной быстрой составляющей x2_true[t], ее оценки в пограничном слое x2_bound[s,t] и ее безынерционной оценки x2_appr[t] при ненулевых управляющих воздействиях.
а)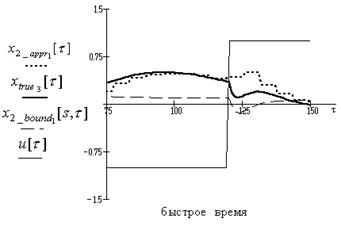
б)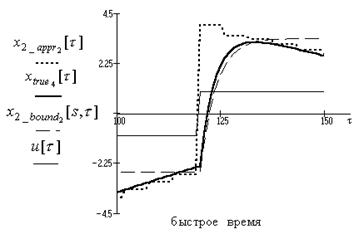
Рис. 7. Сравнение истинной быстрой составляющей (xtrue[t])
с ее оценками по статической (x2_appr[t]) и динамической (x2_bound[s,t]) моделям
Из рис. 7 видно, что в моменты смены управляющего воздействия динамическая оценка x2_boubd[s,t] ближе к истинному значению x2_true[t], при этом безынерционная оценка x2_appr[t] не имеет ничего общего с истинной составляющей. Однако в моменты постоянства управляющего воздействия безынерционная оценка становится точнее оценки пограничного слоя.
Приведенный пример показывает, что разработанная методика позволяет провести все необходимые расчеты, содержит средства для диагностики их правильности и позволяет оценить пригодность метода ДШВ для понижения размерности модели объекта.
§ 4. Использование метода двойной шкалы времени при моделировании электродвигателя постоянного тока
Изложенная выше методика (§ 3) применяется для задачи управления электродвигателем постоянного тока, в котором из физических соображений можно выделить характеристики, обладающие существенно различной инерционностью: скорость вращения вала двигателя и скорость тока в якорной цепи. Целью моделирования является подтверждение предположения о существенно различных инерционных характеристиках объекта и в случае подтверждения – определение интервала дискретизации для быстрой и медленной составляющих объекта.
Модель объекта описывается линейной дискретной системой в терминах пространства состояний:
 ,
,
где x[s] – вектор размерности 2 ´ 1, элементами которого являются: x1 – скорость вращения вала двигателя; x2 – ток в якорной цепи; u[s] – управляющее воздействие – скаляр (напряжение питания цепи якоря); f[s] – возмущающее воздействие – скаляр (момент нагрузки на валу двигателя); s – такты дискретного времени, соответствующие интервалу дискретизации медленного времени Dt; A,B,C – матрицы параметров объекта.
При моделировании по методу ДШВ возмущающее воздействие полагалось равным 0. Более подробное описание модели электродвигателя и ее верификации приведено в приложении 2.
Этап 1. Сепарация вектора состояния. Для декомпозиции вектора состояния рассчитываются параметры матрицы декомпозиции PБ и QБ с использованием Б-преобразования по формулам (1.23) и (1.25). Расчет проводится итеративно. Из рис. 8 видно, что сходимость итерационных процедур хорошая, и в качестве значений параметров можно принять значения на 6-й итерации (PБ = 0,154; QБ = – 1,25).
По полученным значениям PБ и QБ рассчитываются параметры АМ, АБ, BM, BБ модели (1.2) с сепаратными составляющими (формулы приведены в табл. 1).
При правильном расчете параметров PБ и QБ спектр собственных чисел матриц АМ, АБ должен являться объединением спектра собственных чисел исходной матрицы объекта A:
![]() ,
,
где l(А) – собственные числа матрицы А.
|
|
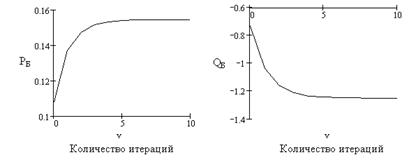
Рис. 8. Сходимость итерационных процедур расчета параметров PБ и QБ
Далее необходимо сравнить графики исходных переменных состояния (x1[s] и x2[s]) и полученных в результате декомпозиции (xM[s] и xБ[s]).
|
|
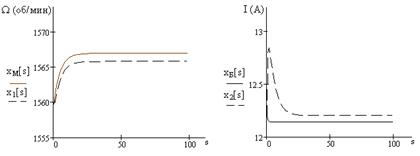
Рис. 9. Сравнение исходных переменных состояния (x1[s], x2[s]) и сепаратных (xM[s], xБ[s])
Из рис. 9 видно, что динамика быстрого процесса x2[s] не сразу заканчивается из-за влияния медленного процесса через элемент A21 матрицы А. В то же время составляющая xБ[s], полученная в результате декомпозиции, почти не имеет инерции и завершается быстро.
Для проверки правильности декомпозиции используем два теста, введенные в п. 1.3:
1. Между исходными и сепарированными переменными состояния существует линейное преобразование (1.19). Соответственно значения вектора состояния, полученные с помощью этого преобразования, должны быть равны значениям исходного вектора состояния в одинаковые моменты времени s. Так, при s = 4 (как и при других s) значения одинаковы:
 ,
,
где ![]() – вектор, полученный с помощью преобразования (1.19); x[4] – исходный вектор.
– вектор, полученный с помощью преобразования (1.19); x[4] – исходный вектор.
2. Аналогично получается и второе преобразование, при котором из исходного вектора состояния с помощью (1.18) получается вектор сепарированных переменных xM[s] и xБ[s]. Значения вектора, полученного с помощью преобразования (1.18), должны совпадать со значениями xM[s] и xБ[s]. В данном случае это также соблюдается. Например, при s = 10:

где ![]() – вектор, полученный с помощью преобразования (1.18); xM[10], xБ[10] – значения сепарированных медленной и быстрой составляющих.
– вектор, полученный с помощью преобразования (1.18); xM[10], xБ[10] – значения сепарированных медленной и быстрой составляющих.
На этом первый этап моделирования закончен. В результате его выполнения проведена декомпозиция исходной модели на две составляющие, имеющие различные инерционные характеристики.
Этап 2. Определение величины малого параметра для шкалы быстрого времени. В качестве критерия, определяющего наличие свойства ДШВ в объекте, был выбран малый параметр m (формула (1.28)). При расчете малого параметра для электродвигателя получилось следующее значение:
![]()
Полученное значение меньше единицы, что говорит о возможности наличия свойства ДШВ в объекте.
Кроме параметра m, рассчитываются еще несколько параметров (1.29), (1.30), которые позволяют проверить, будет ли достигнута хорошая точность аппроксимации динамики процесса в объекте с использованием только медленной составляющей.
1. По формуле (1.29) получен следующий результат:
![]() .
.
Как видно из неравенства, при значении m = 0.187 данный тест дает положительный результат, следовательно, в объекте свойство ДШВ имеет место.
2. По формуле (1.30) получен следующий результат:
![]() .
.
Данное неравенство выполняется, так как PБ = 0.155.
На этом этап 2 завершен. Поскольку все тесты дали положительный результат, то свойство ДШВ имеет место в объекте.
Этап 3. Моделирование динамики системы с помощью метода двойной шкалы времени.
1. Определяется число тактов, относящихся к пограничному слою. При этом погрешность аппроксимации (e) процесса медленной составля-ющей равна 0.001. Переменная x1_appr[s] рассчитывается по формуле (1.37) и приближенно соответствует «физической» медленной составляю-щей x1[s]. Аппроксимация x2_appr[s] (по формуле 1.38) динамики «физической» быстрой составляющей x2[s] сводится к безынерционному слежению за изменениями медленной составляющей и управляющих воздействий.
На рис. 10 приведены графики, иллюстрирующие точность аппроксимации динамики объекта.
а) б)
Рис. 10. Точность аппроксимации исходного вектора состояния (x1[s], x2[s])
моделью пониженного порядка (x1_appr[s], x2_appr[s])
Из рис. 10а следует, что точность аппроксимации медленной составляющей очень хорошая. Но точность аппроксимации быстрой составляющей на первых нескольких тактах неудовлетворительна.
Погрешность аппроксимации оценивается по средним квадратическим ошибкам, значения которых для медленной (JM) и быстрой (JБ) составляющих равны:
при k = 0: JM = 0.0339, JБ = 0.0318;
при k = 3: JM = 0.0067, JБ = 0.0013.
Как следует из полученных результатов, по мере удаления от начального момента времени точность аппроксимации моделью пониженного порядка возрастает.
Далее рассчитывается величина пограничного слоя. Для этого вводится общий показатель аппроксимации – среднее квадратическое отклонение всех компонент истинного вектора x[s] от его аппроксимации вектором xappr[s]:
![]() .
.
Рис. 11 показывает, что погрешность со временем резко уменьшается.
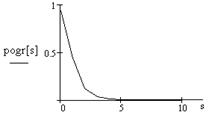
Рис. 11. Погрешность аппроксимации исходного вектора x[s]
моделью пониженного порядка xappr[s]
Используя рассчитанную величину погрешности, оцениваем продолжительность пограничного слоя, которая при моделировании электродвигателя получилась равной: sboundary = 4 такта медленного времени, т. е. 6 (с).
2. Далее производится расчет интервала дискретизации быстрой шкалы времени и пересчет модели объекта согласно новой дискрете. Интервал дискретизации для пограничного слоя вычисляется с помощью малого параметра m:
![]()
где Dt – интервал дискретизации медленного времени.
Затем параметры модели объекта пересчитываются с учетом нового интервала дискретизации и определяется количество тактов быстрого времени, приходящееся на один такт медленного времени (nБ = 6).
Модель пониженного порядка для приближенного описания быстрой составляющей в пограничном слое имеет вид (1.39).
Медленная составляющая в пограничном слое считается константой:
![]() .
.
Для сравнения рассчитывается точное значение переменных состояния:
![]() ,
,
где Abound, Bbound – параметры модели объекта, пересчитанные с учетом интервала дискретизации dt.
На рис. 12 приведено сравнение истинных значений вектора состояния и его приближенной оценки.
|
|
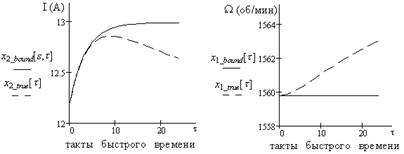
Рис. 12. Сравнение истинного значения вектора состояния и его оценки в пограничном слое
Из рис. 12 следует, что к концу пограничного слоя истинное значение быстрой составляющей x2_true[t] расходится со своей оценкой x2_bound[s,t]. Это подтверждает предположение о том, что динамику быстрой составляющей необходимо учитывать только в начале пограничного слоя.
Для оценки точности аппроксимации медленной составляющей константой рассчитывается относительная погрешность:
 ,
,
где sb – число тактов быстрого времени в пограничном слое.
Относительная погрешность аппроксимации медленной составляющей электродвигателя равна: Jотн = 0.13 %. Как видно, в конце пограничного слоя погрешность невелика.
В заключение производится сравнение погрешности аппроксимации быстрой составляющей статической (1.38) и динамической (1.39) моделями:
Результаты сравнения приведены на рис. 13.
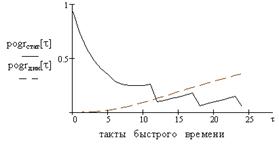
Рис. 13. Погрешности оценивания быстрой составляющей
статической (1.38) и динамической (1.39) моделями
Как видно из рис. 13, к концу пограничного слоя точность обеих оценок сближается. На начальном участке пограничного слоя хорошо видно улучшение оценки быстрой составляющей благодаря учету ее динамики.
На рис. 14 сопоставлены значения истинной быстрой составляющей x2_true[t], ее оценки в пограничном слое x2_bound[s,t] и ее безынерционной оценки x2_appr[s].
Из рис. 14 видно, что на первых тактах пограничного слоя динамическая оценка x2_bound[s,t] точно следует истинному значению x2_true[t], при этом безынерционная оценка x2_appr[t] не имеет ничего общего с истинной составляющей. Однако затем точности оценок выравниваются, а в конце пограничного слоя безынерционная оценка становится точнее оценки, учитывающей динамику только быстрого субпроцесса (в предположении о постоянстве значения вектора состояния медленного субпроцесса).
![]()
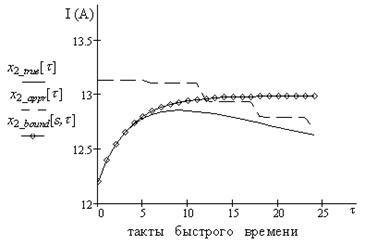
Рис. 14. Сравнение истинной быстрой составляющей (x2_true[t])
с ее оценками по статической (x2_appr[t]) и динамической (x2_bound[s,t]) моделям
§ 5. Выводы
1. Предложена методика моделирования многомерных линейных дискретных систем управления на основе метода декомпозиции модели объекта с существенно различными инерционными характеристиками. Определены условия, позволяющие проверить наличие свойства ДШВ в объекте без расчета собственных чисел. Приведено подробное описание схемы моделирования системы по методу ДШВ для оценки точности аппроксимации объекта только медленной составляющей.
2. Предложенная методика подробно рассмотрена на примере моделирования системы четвертого порядка. Проведенное моделирование подтверждает возможность упрощенного описания данного объекта и выделения в нем процессов с существенно различными инерционными характеристиками. Предложенная методика позволяет проводить моделирование при ненулевых управляющих воздействиях. Таким образом, решена первая подзадача метода ДШВ – моделирование динамики сложного объекта с понижением порядка уравнений, ее описывающих.
3. Проверка методики проведена на примере моделирования динамики изменения скорости вращения (медленный субпроцесс) и тока в якорной цепи (быстрый субпроцесс) электродвигателя постоянного тока. Полученные результаты подтверждают возможность использования метода ДШВ при управлении данным объектом.
ГЛАВА 2. ПРОЕКТИРОВАНИЕ АЛГОРИТМИЧЕСКОГО ОБЕСПЕЧЕНИЯ ЦИФРОВОГО пи-РЕГУЛЯТОРА С УЧЕТОМ СВОЙСТВ ОБЪЕКТОВ С РАЗНОТЕМПОВЫМИ ПРОЦЕССАМИ
Содержание раздела составляют вопросы, связанные с расширением области применения цифровых регуляторов на объекты с существенно различными инерционными характеристиками.
В настоящее время цифровые (в частности пропорционально-интегральные (ПИ)) регуляторы применяются в одноконтурных системах управления. Представляет интерес задача усовершенствования популярного цифрового ПИ-закона управления без усложнения его технической структуры [32], за счет внесения изменений в алгоритмическое обеспечение. Ниже рассматриваются возможности такого усовершенствования за счет введения двойной шкалы времени и моделей пониженного порядка.
Благодаря упрощениям, вносимым методом ДШВ, удается разработать алгоритм для ПИ-регулятора, в котором искусственно сформированы два контура за счет реализации управления в виде составного по схеме, описанной в п. 1.3. Контур, ответственный за управление медленными субпроцессами, работает в шкале медленного времени и реализует ПИ-управление этими субпроцессами. Контур, ответственный за управление свободной составляющей быстрого субпроцесса, работает в шкале быстрого времени только эпизодически, в периоды изменений режима работы объекта. В результате ритм работы регулятора получается неравномерным, и паузы, внутри которых быстрый контур не инициируется, могут быть заполнены дополнительными функциями, для которых в регуляторах с традиционной организацией вычислительного процесса недостаточен ресурс времени. Соответственно может быть повышен уровень автоматизации и достигнут дополнительный экономический эффект.
Изложение проводится по следующей схеме.
На примере задачи управления объектом 2-го порядка рассматривается построение двухконтурного («двушкального») цифрового ПИ-регуля-тора (§ 1). Проводится анализ эффективности использования «двушкальных» регуляторов для задач управления объектами с разнотемповыми составляющими (§ 2). Для этого вводится система показателей качества (п. 2.1), позволяющих оценивать качество управления и возможности высвобождения ресурсов цифровой системы при использовании «двушкального» ПИ-регулятора. Оценка эффективности использования такого рода регуляторов проводится на примере задачи управления электродвигателем постоянного тока (п. 2.2).
§ 1. Схема построения цифрового ПИ–регулятора
для объектов с разнотемповыми составляющими
Традиционно ПИ-регулятор [33] применяется в одноконтурных системах управления. Цифровая форма ПИ-закона управления имеет вид:
 ,
,
где u[s+1] – скалярное управляющее воздействие, рассчитываемое для следующего, (s+1)-го такта по данным об отклонениях e [s] и e [s–1] скалярного выхода объекта от заданного значения на текущем и предшествующем тактах работы системы, а также по величине управляющего воздействия u[s] в текущем такте. Настроечными параметрами ПИ-регулятора являются коэффициенты kp и ki (дискретные аналоги настроечных параметров ПИ-регулятора с непрерывным временем, характеризующие вклады пропорциональной и интегральной составляющих закона управления).
Представляет интерес расширение сферы применения ПИ-регулятора такое, чтобы в рамках одной и той же технической структуры управляющей системы реализовать двухконтурное управление путем усовершенствования алгоритмического обеспечения. Ниже данная задача решается применительно к управлению разнотемповыми процессами. Особенности этих процессов, рассмотренные в гл. 1, позволяют осуществить «развязку» контуров единой технической структуры во времени, используя метод ДШВ. Далее регулятор, имеющий контуры раздельного управления медленной и быстрой составляющими вектора состояния объекта, называется «двушкальным».

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
