


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рассматривается задача управления объектом, у которого имеется два выхода с различными характеристиками инерционности. Управление организуется по следующей схеме:

Рис. 15. Структура системы управления с «двушкальным» ПИ-регулятором
Управляющее воздействие u[s, t] рассчитывается как составное,
![]() ,
,
причем такты s = 0, 1, … отсчитываются с дискретой медленного времени Dt , а такты t = 0, 1, … – с дискретой быстрого времени dt, dt = m×Dt, m <<1, где m – малый параметр, рассчитываемый исходя из характеристик разнотемповости, см. (1.28) в гл. 1.
В периоды длительного постоянства задающих воздействий операция управления осуществляется медленной компонентой uM[s] составного управления со сравнительно редкими управляющими воздействиями (периодичность выдачи управлений Dt сравнительно большая). При этом, как следует из изложенного в гл. 1, достигается высокая точность управления не только медленным субпроцессом, но и вынужденной составляющей быстрого субпроцесса.
В моменты резкого изменения задающих воздействий инициируется быстрая компонента uБ[s,t] составного управления, «помогающая» основному, медленному контуру управлять динамикой быстрой составляющей. Далее подробное описание схемы построения «двушкального» ПИ-регулятора ведется на примере управления линейным дискретным объектом второго порядка, модель которого порождена исходной моделью в непрерывном времени:
![]() , (2.1)
, (2.1)
где x(t) – вектор переменных состояния объекта размерности 2 ´ 1; u(t) – управляющее воздействие (скаляр);
![]() – матрицы параметров объекта. (2.2)
– матрицы параметров объекта. (2.2)
Значения параметров дискретной модели рассчитаны по методике, описанной в § 3, см. этап 1. В рассматриваемом примере:
![]() . (2.3)
. (2.3)
Для того чтобы определить, обладает ли объект разнотемповыми составляющими, рассчитаем значение малого параметра m (см. § 3, этап 2, гл. 1), получим m = 0.058. Значение параметра m удовлетворяет условию (1.28); следовательно, в объекте имеются процессы с существенно различными инерционными характеристиками.
Затем рассчитывается интервал дискретизации быстрого времени (dt) и число (step) отсчетов быстрого времени в одной дискрете медленного времени:
![]()
Будем рассматривать режим работы объекта, при котором задающие воздействия для медленной и быстрой составляющих носят характер периодических колебаний прямоугольной формы (рис. 16).
|
|
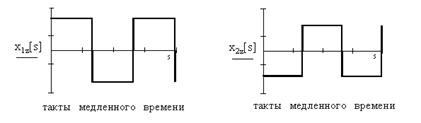
Рис. 16. Задающие воздействия для медленной x1z[s] и быстрой x2z[s] составляющих
Характер процессов в объекте оценивается кривой разгона [40] (рис. 17).
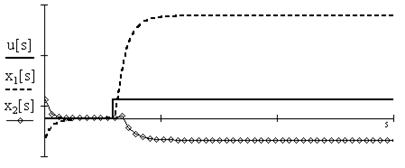
Рис. 17. Реакция объекта на ступенчатое управляющее воздействие
По виду графика нельзя заметить, что в процессе есть медленная и быстрая составляющие, поскольку через внедиагональные элементы матрицы А медленная составляющая влияет на быструю и порождает иллюзию «собственной» (а не вынуждаемой изменениями медленной составляющей и управляющими воздействиями) динамики в ней.
Далее рассчитываются параметры системы управления, синтезируемой в предположении об отсутствии динамики у быстрого процесса. Тогда его уравнение можно приближенно записать в статической форме:
![]() .
.
В результате получим описание быстрой составляющей через медленную
![]() , (2.4)
, (2.4)
где ![]()
После подстановки безынерционной модели быстрого процесса (2.4) в уравнение медленного процесса произойдет понижение порядка объекта (до первого).
Для управления медленным процессом используем дискретный вариант ПИ-закона с настроечными параметрами, значения которых в рассматриваемом примере выбраны из условия достижения минимального времени переходного процесса при отсутствии перерегулирования: kp = 0.08, ki = 0.009.
Расчет медленной составляющей и управляющих воздействий производится по следующим формулам:
![]()
Далее необходимо произвести пересчет задающих воздействий для быстрой составляющей путем исключения влияния медленной составляющей:
![]() .
.
В результате получится безынерционная модель быстрой составляющей, отслеживающая задающее воздействие
![]() .
.
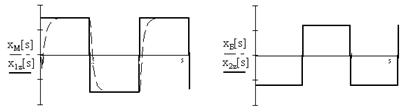
На рис. 18 представлены результаты управления по модели пониженного порядка.
а) б)
Рис. 18. Графики отработки задающих воздействий для медленной
и быстрой составляющих
На графиках видно иллюзорно хорошее качество управления «быстрым» процессом (благодаря безынерционности его приближенного описания график точно следует заданию). Виден динамический характер изменения медленной составляющей даже при условии безынерционности быстрой составляющей.
Для оценки потерь качества управления, вызванных отказом от рассмотрения быстрой составляющей как динамической, сравним результаты, представленные на рис.18, с расчетами, в которых те же управляющие воздействия применяются к объекту с исходной моделью. Для этого производится пересчет задающих воздействий для быстрой составляющей
![]() .
.
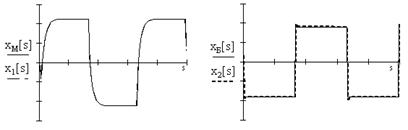
В результате получим график отработки управляющего воздействия, рассчитанного по модели пониженного порядка, в системе с объектом исходного порядка (рис. 19):
![]() .
.
а) б)
Рис. 19. Сравнение точности расчета изменений вектора состояния
при использовании моделей пониженного и полного порядка
Из графиков (рис. 19) видно, что уточнение описания модели объекта (учет динамики быстрой составляющей) не требуется: имеет место практически полное совпадение результатов расчета по моделям полного и пониженного порядка.
Сквозь призму медленного времени имеет место также хорошее совпадение быстрой составляющей с расчетной, безынерционной. Это связано с тем, что за интервал времени Dt, выбранный для медленной составляющей, переходный процесс в быстрой составляющей практически заканчивается. Однако даже при использовании интервала дискретизации Dt заметно наличие пограничного слоя (рис. 19), на котором имеют место небольшие отклонения быстрого процесса от его модели при изменениях задающих воздействий.
Более детально отличие быстрого процесса xБ[s] от его истинного значения x2[s] показано на рис. 20.
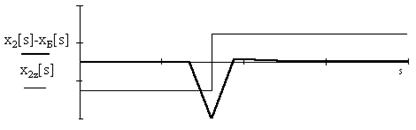
Рис. 20. Погрешность оценки истинной быстрой составляющей x2[s]
ее моделью xБ[s] в момент смены задающего воздействия x2z[s]
Для улучшения качества управления в пограничном слое используется быстрая добавка к медленному управлению, рассчитываемая в быстром времени. Для этого необходимо произвести пересчет всех параметров на быструю шкалу. На рис. 21 приведен график управляющего воздействия в быстрой шкале времени.
|
|
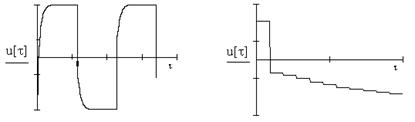
Рис. 21. График управляющего воздействия в быстром времени
Справа на рис. 21 приведен фрагмент графика в растянутой шкале, где отчетливо видны участки постоянства медленного управления на тактах отсчета быстрого времени.
Быстрая добавка к управляющему воздействию рассчитывается по следующей схеме:
1. Предполагается, что за такт быстрого времени медленная составляющая не изменяется:
![]() ,
,
где uБ[s,t] – быстрая добавка к управлению u[s].
2. В полученное выражение подставим значение C2[s]:
 .
.
3. После упрощений получится уравнение для быстрого процесса в пограничном слое в отклонениях от задания:
* , (2.5)
, (2.5)
где  – рассогласование между «быстрым» процессом в пограничном слое и задающим воздействием.
– рассогласование между «быстрым» процессом в пограничном слое и задающим воздействием.
4. Уравнение (2.5) показывает, что можно обеспечить сходимость быстрого процесса к заданию за один такт быстрого времени, если использовать пропорциональный (П)-закон управления:
![]() ,
,
где  .
.
Однако такое большое значение коэффициента усиления регулятора может нарушить устойчивость медленного процесса, поэтому следует подбирать его при настройке. В частности, можно использовать переменный коэффициент усиления П-закона, уменьшающий долю быстрого управления по мере удаления от момента смены задающего воздействия:
 ,
,
где ![]() – максимальное значение коэффициента усиления (a – множитель, подбираемый при настройке).
– максимальное значение коэффициента усиления (a – множитель, подбираемый при настройке).
На рис. 22 приведен график изменения коэффициента усиления П–регулятора. Заметно снижение значения коэффициента усиления по мере удаления от момента смены задающего воздействия.
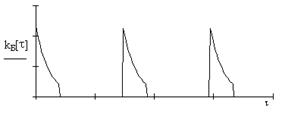
Рис. 22. Фрагмент графика изменения коэффициента усиления П-регулятора
Далее производится расчет процессов в системе управления с использованием составного управляющего воздействия (суммы медленного и быстрого управления):
![]() ,
,
где  – быстрое управление; xМ_Б[s,t] – процесс, вызванный в системе составным управлением; u[t] – медленное управление, пересчитанное на шкалу быстрого времени; C[t] – поправочный вектор задающих воздействий, пересчитанный на шкалу быстрого времени.
– быстрое управление; xМ_Б[s,t] – процесс, вызванный в системе составным управлением; u[t] – медленное управление, пересчитанное на шкалу быстрого времени; C[t] – поправочный вектор задающих воздействий, пересчитанный на шкалу быстрого времени.
В качестве основы для сравнения рассчитывается процесс, происходящий только под влиянием медленного управления:
![]() ,
,
где Ad, Bd – параметры объекта, рассчитанные для дискретной модели с интервалом дискретизации dt, порожденной из (2.1).
На рис. 23 представлен график быстрого управления.
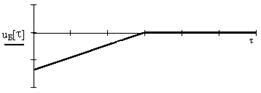
Рис. 23. График быстрого управления в пограничном слое
На графике хорошо прослеживается уменьшение значения быстрого управления по мере удаления от границы смены задающего воздействия.
На рис. 24 приведены результаты сравнения эффективности составного управления по сравнению с управлением только медленной составляющей. Быстрое управление порождает «всплеск» на графике xМ_Б[s,t]. При рассмотрении процесса xМ_Б[s,t] в медленной шкале времени «всплеск» не обнаруживается, так как затухает внутри такта медленного времени. Поведение процесса xМ_Б[s,t] в медленной шкале при использовании составного управления будет неотличимо от поведения при использовании только медленного управления.
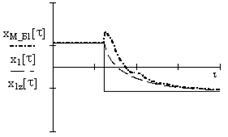
Рис. 24. Сравнение графиков медленного процесса при использовании
составного управления (xМ_Б[s,t]) и только медленного управления (x1[t])
На рис. 25 прослеживается заметное улучшение качества управления на начальном участке пограничного слоя.
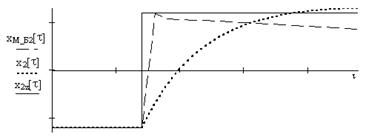
Рис. 25. Сравнение графиков быстрого процесса при использовании
составного управления (xМ_Б[t]) и только медленного управления (x2[t])
На этом процесс построения алгоритмического обеспечения цифрового «двушкального» ПИ-регулятора завершается. Такой регулятор, в отличие от обычного ПИ-регулятора, формирует составное управляющее воздействие, включающее в себя сумму быстрой и медленной составляющих. Приведенные выше результаты показывают, что при этом достигается повышение качества управления, особенно заметное для быстрой составляющей выхода объекта.
§ 2. Оценка эффективности использования
«двушкальных» цифровых ПИ-регуляторов
Предлагается подход для обоснования эффективности введения ДШВ при проектировании цифровых систем управления. Подход основан на сопоставлении затрат ресурсов ЭВМ на организацию ДШВ, с одной стороны, и эффектов от повышения точности управления быстрой фазой за счет введения ДШВ и от расширения функций локальной системы управления, которые могут быть реализованы на свободных ресурсах вычислительной системы, с другой стороны.
Расчет эффективности основывается на следующих данных.
1. Неизменяемая часть:
– малый параметр m, показывающий степень различия инерционных характеристик объекта;
– характеристики задающих воздействий; представляются в форме средней частоты изменения режима работы объекта.
2. Варьируемая часть:
– вариант технической структуры, задается характеристиками ресурсов цифровой системы (быстродействием, объемом оперативной памяти, скоростными характеристиками передачи данных и др.);
– состав дополнительных информационных функций автоматического или автоматизированного управления (учет, контроль, протоколирование действий персонала, техническая диагностика и т. п.), которые могут принести экономический эффект, но непосредственно не связаны с управлением переменными состояния.
Предположим, что вариант технической структуры выбран. Тогда задачу удается параметризировать, рассчитывая перечисленные эффекты и затраты в функции средней частоты изменения задающих воздействий и возмущений (рис. 26).
Комментарии к рис. 26:
1. Затраты, связанные с организацией собственно режима ДШВ (т. е. с расчетом параметров, агрегированных фильтров, преобразованных элементов объекта и т. д.) можно считать независимыми от частоты смены режима работы.
Рис. 26. Обоснование эффективности введения ДШВ
2. Потери от функциональной неполноты системы из-за недостатка ее ресурсов будут небольшими при редких изменениях режима, поскольку после операций по расчету медленной составляющей управляющего воздействия высвобождается большая доля интервала времени Dt (эта доля и используется для выполнения дополнительных функций).
3. При увеличении частоты смены режима быстрая шкала занимает все большую часть шкалы медленного времени; при этом возрастает количество дополнительных функций системы, которые должны быть исключены из контура управляющей системы; соответственно, растут потери, связанные с их невыполнением.
4. Потери, связанные с ухудшением точности управления быстрой составляющей, уменьшаются по мере увеличения интервала действия быстрой фазы. Это уменьшение тем заметнее, чем чаще изменяется режим.
Если просуммировать все эти составляющие, то окажется, что имеется экстремум, соответствующий минимуму суммарных потерь качества управления при использовании цифровой системы с заданными ресурсами для управления объектом с заданными характеристиками разнотемповости. Положение минимума показывает, при какой средней частоте смены задающих воздействий экономический эффект от введения ДШВ максимален. Возможна также оценка диапазона частот изменения режима работы объекта, внутри которого эффект от введения ДШВ превосходит потери от утраты части функций цифровой системы (правая ветвь экстремальной кривой на рис. 26) или от снижения качества управления быстрой составляющей (левая ветвь).
Вышеизложенные положения иллюстрируются на примере задачи управления электродвигателем постоянного тока, моделирование которого по методу ДШВ рассматривается в гл. 1 (§ 4).
2.1. Система показателей для оценки эффективности введения ДШВ
Для оценки качества использования цифрового «двушкального» ПИ-регулятора по сравнению с обычным ПИ-регулятором вводятся следующие показатели качества:
1. Количество свободного времени (в тактах медленного времени) в промежутках между включениями быстрого управления – timefree. Показатель определяет, какой резерв времени имеется в цифровой системе для реализации дополнительных информационных функций, не связанных непосредственно с управлением (контроля, учета и т. д.). Для расчета показателя определяется количество тактов быстрого времени, когда быстрое управление равно нулю. Полученное значение времени делится на количество тактов быстрого времени в одной дискрете медленного.
2. Среднее квадратическое отклонение быстрого процесса от задающего воздействия при использовании составного (СКОБ) и только медленного управления (СКОБ_М) в пограничном слое:
 ,
,
где sbound – число тактов медленного времени, по истечении которых можно считать, что «собственные» динамические процессы в быстрой составляющей завершились; Ds – периодичность изменений задающего воздействия (количество тактов медленного времени); xМ_Б2[t] – вектор быстрого процесса при использовании составного управления; x2z[t] – вектор задающих воздействия для быстрого процесса,
 ,
,
где x2[t] – вектор быстрого процесса при использовании только медленного управляющего воздействия.
3. Сравнительная оценка среднего квадратического отклонения быстрого процесса при использовании составного и только медленного управления:
 .
.
4. Относительное отклонение быстрого процесса от задания при использовании составного (Jotn_Б) и только медленного управления (Jotn_Б_М) в пограничном слое:
 ;
;![]() .
.
5. Сравнительная оценка относительного отклонения быстрого процесса при использовании составного и только медленного управления:
![]() .
.
6. Среднее квадратическое отклонение медленного процесса при использовании составного (СКОМ) и только медленного управления (СКОМ_М) в пограничном слое:
 ,
,
где xМ_Б1[t] – вектор медленного процесса при использовании составного управления; x1z[t] – вектор задающих воздействия для медленного процесса,
 ,
,
где x1[t] – вектор медленного процесса при использовании только медленного управления.
7. Сравнительная оценка среднего квадратического отклонения медленного процесса при использовании составного и только медленного управления
![]() .
.
8. Относительное отклонение медленного процесса от задания при использовании составного (Jotn_М) и только медленного управления (Jotn_М_М) в пограничном слое:
![]() ;
;
![]() .
.
9. Сравнительная оценка относительного отклонения медленного процесса при использовании составного управления и только медленного управления:
![]() .
.
10. Среднее квадратическое отклонение медленного процесса при использовании составного (СКОall_М) и только медленного управления (СКОall_М_М) за весь период управления:


11. Сравнительная оценка среднего квадратического отклонения медленного процесса при использовании составного и только медленного управления:
 .
.
12. Среднее квадратическое отклонение быстрого процесса при использовании составного (СКОall_Б) и только медленного управления (СКОall_Б_М) за весь период управления:
 ,
,
 .
.
13. Сравнительная оценка среднего квадратического отклонения медленного процесса при использовании составного и только медленного управления:
 .
.
2.2. Исследования качества управления объектом с применением «двушкального» цифрового ПИ-регулятора
В качестве объекта исследования рассматривается электродвигатель постоянного тока (модель и параметры приведены в приложении 2). Для оценки эффективности применения «двушкальных» цифровых регуляторов были проведены следующие эксперименты:
1. Сравнение динамики медленного и быстрого процессов при использовании составного и только медленного управления, а также зависимость свободного времени в системе управления от частоты задающего воздействия. Результаты эксперимента приведены на рис. 27, 28.
Из рис. 27, 28 видно, что при увеличении частоты задающего воздействия количество тактов свободного времени уменьшается. Но при этом возрастает качество управления быстрым процессом при использовании составного управления по сравнению с обычным управлением. Преимущество же медленного процесса при использовании составного управления по сравнению с обычным (только медленным) управлением невелико и остается на постоянном уровне.
Рис. 27. Графики изменения свободного времени и сравнительной характеристики
быстрого процесса при изменении частоты задающего воздействия
Рис. 28. Графики изменения сравнительной характеристики медленного процесса Compall_M при изменении частоты задающего воздействия
Таким образом, имеется возможность обоснования области эффективного использования алгоритмов управления с ДШВ в составе управляющих и информационных функций автоматических и автоматизированных систем управления технологическими процессами (АСУТП). При заданных ресурсах техники управления и характеристиках разнотемповости процессов в объекте эта область определяется частотой изменений задающих воздействий, при которой достигается компромисс между требованием обеспечить высокое качество управления быстрым процессом, с одной стороны, и стремлением высвободить ресурс времени управляющей системы для реализации дополнительных функций.
2. Исследование влияния изменения частоты возмущающего воздействия (при постоянной частоте задающего воздействия) на динамику медленного и быстрого процессов (результаты представлены на рис. 29, 30).
Графики, показанные на рис. 29, подтверждают предположение о том, что при увеличении частоты возмущающего воздействия качество управления медленным процессом остается неизменным, а качество управления быстрым процессом улучшается.
Рис. 29. Графики сравнительной характеристики быстрого и медленного процессов
при изменении частоты возмущающего воздействия
На рис. 30 сравнивается динамика быстрой составляющей при 2-кратном и 10-кратном изменении возмущающего воздействия за весь период управления. Из рисунка видно заметное улучшение качества управления при увеличении частоты возмущающего воздействия.
|
|
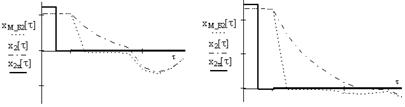
Рис. 30. Сравнение динамики быстрого процесса с использованием составного (xМ_Б2[t]) и только медленного управления (x2[t]) при частоте возмущающего воздействия,
равной 2 (рис. а) и 10 (рис. б)
3. Сравнение динамики медленного и быстрого процессов при использовании составного и только медленного управления в пограничном слое в зависимости от частоты изменений задающего воздействия. Результаты сравнения приведены на рис. 31.
Из рис. 31 следует, что при изменении частоты задающего воздействия качество управления быстрой составляющей при составном управлении выигрывает по сравнению с использованием только медленного управления. Отличие медленного процесса при составном управлении от процесса при обычном управлении невелико и остается на постоянном уровне. Эти результаты еще раз подтверждают предположение о том, что введение «двушкального» цифрового ПИ-регулятора не ухудшает качество управления медленной составляющей по сравнению с обычным ПИ-регулятором, но при этом достигается улучшение качества управления быстрой составляющей.
Рис. 31. Графики сравнения относительного отклонения (%) медленной и быстрой
составляющих от задающего воздействия при различных вариантах управления
§ 3. Выводы
1. Разработано алгоритмическое обеспечение для «двушкального» цифрового ПИ-регулятора. Построение такого регулятора учитывает различие в инерционных характеристиках объекта и позволяет управлять многомерными объектами без существенного усложнения технического обеспечения.
2. Разработана методика обоснования области эффективного использования алгоритмов управления с ДШВ в составе алгоритмического обеспечения АСУТП. Показано, что при заданных ресурсах техники управления и характеристиках разнотемповости процессов в объекте эта область определяется частотой изменений задающих воздействий, при которой достигается компромисс между требованием обеспечить высокое качество управления быстрым процессом, с одной стороны, и стремлением высвободить ресурс времени управляющей системы для реализации дополнительных информационных функций АСУТП, с другой стороны.
3. Разработана система показателей качества для оценки эффективности использования двойной шкалы времени в цифровых управляющих системах.
4. Проведены исследования эффективности применения ДШВ в системе управления скоростью вращения электродвигателя постоянного тока.
ГЛАВА 3. синтез субоптимальных систем управления объектами с разнотемповыми субпроцессами
Содержание главы составляют вопросы, связанные с упрощением решения задачи линейно-квадратичной оптимизации за счет использования свойств разнотемповости процессов в объекте [31...36].
Согласно алгоритму решения этой задачи методом аналитического конструирования оптимальных регуляторов (АКОР), разработанному , управляющее воздействие формируется в цепи отрицательной обратной связи на основе измерения всех компонентов вектора состояния объекта. Для многомерных объектов решение этой задачи требует довольно больших вычислительных ресурсов.
В связи с этим актуальной становится задача о возможности использования модели пониженного порядка для синтеза оптимальных управляющих воздействий. В результате размерность задачи может быть снижена до размерности медленного субпроцесса в объекте без существенной потери качества управления объектом в целом.
Изложение проведено по следующей схеме.
На основании постановки задачи аналитического конструирования оптимальных регуляторов (АКОР) (§ 1) проводится синтез субоптимальных алгоритмов управления (§ 2). Поскольку в алгоритмах, разработанных на основе АКОР, используются все переменные состояния объекта, в том числе и неизмеряемые, в § 3 излагаются результаты разработки фильтра пониженного порядка для восстановления неизмеряемых компонентов.
Материал, изложенный в данной главе, представляет также интерес с позиции проверки эффективности метода ДШВ в целом. При обосновании упрощения эвристических алгоритмов могут возникнуть затруднения, связанные с неоднозначностями при выборе настроечных параметров сопоставляемых законов управления. Необходимы аргументы, позволяющие доказать, что база для сравнения (закон управления, используемый без упрощений модели объекта) выбрана обоснованно и корректно. В отличие от эвристических законов управления оптимизационные алгоритмы, синтезируемые на основе строгих допущений, позволяют получить количественные данные об оптимальном значении критерия, оптимальной траектории компонент вектора состояния и управляющих воздействий в системе, используемой в качестве базы для сравнения, и благодаря этому получить корректную, обоснованную оценку эффективности предлагаемого метода упрощения.
§ 1. База для оценки эффективности использования метода ДШВ
В качестве базы для оценки эффективности упрощений, вводимых при использовании метода ДШВ, будем использовать точное решение оптимизационной задачи аналитического конструирования оптимальных регуляторов (АКОР), соответствующее полноразмерной модели объекта (1.35). Задача АКОР широко освещена в научной литературе [31...36], поэтому опишем ее ниже только конспективно.
Постановка задачи АКОР формулируется в следующих терминах:
Необходимо найти r-мерные векторы управляющих воздействий v[s], s = 0, 1, …, N – 1, N – задано, доставляющие минимум квадратичному критерию J, сформированному на отклонениях n-мерного вектора состояния z[s] от n-мерного вектора задающих воздействий z*[s], s = 0, 1, …, N и на отклонениях v[s] от желательных значений r-мерного вектора v*[s], s = 0, 1, …, N–1:
 (3.1)
(3.1)
где K[N], Q[s], s = 0, 1, …, N – 1 – заданные симметричные неотрицательно определенные матрицы размерности n ´ n, n ´ n соответственно; R[s] – r ´ r положительно определенная симметричная матрица.
Примечание: в задаче АКОР, рассматриваемой в непрерывном времени t, матрица R(t) должна быть положительно определенной. В дискретных системах часто встречаются задачи с такими параметрами, что требование положительной определенности матрицы R[s] может быть заменено более слабым требованием неотрицательной определенности (в частности, R[s] может быть нулевой).
Элементы K[N], Q[s] и R[s] в (3.1) имеют смысл штрафов за отклонения соответствующих компонентов векторов z[N], z[s], v[s] от заданных z*[N], z*[s], v*[s].
Минимизация (3.1) по v[s] производится на системе ограничений – линейных равенств, имеющих смысл модели объекта:
 (3.2)
(3.2)
где F[s] – внешнее детерминированное возмущение (значение F[s] известно заранее для всех s = 0, 1, …, N – 1); A[s], B[s] – соответственно n ´ n и n ´ r матрицы параметров объекта (возможно зависящие от времени, зависимость детерминированная).
Ограничения-неравенства отсутствуют; диапазон изменений переменных состояния и управлений косвенно задается путем надлежащего выбора матриц штрафов K[N], Q[s], R[s] в (3.1).
Решение задачи АКОР. Для нахождения решения используется метод динамического программирования [36]. Обычно в научной литературе приводится результат, относящийся к нулевым значениям задающих воздействий z*[N], z*[s], внешних возмущений F[s] и желательных управлений v*[s]. Полезно привести результаты обобщения решения на случай, когда z*[N], z*[s], v*[s], F[s], s = 0, 1, …, N – 1 – ненулевые векторы. Для этого используем замену переменных:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
