


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Отличие критериев оптимальности (3.17) и (3.4) для траекторий, приведенных на рис. 33 составляет 1.25 %, а на рис. 34 – 7.3 %, что подтверждает возможность использования модели пониженного порядка при расчете оптимальных управлений в задаче АКОР.
|
|

Рис. 33. Сравнение результатов управления с помощью классической задачи АКОР (xopt[s]) и субоптимального управления (xopt_M[s])
|
|
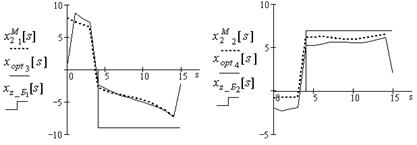
Рис. 34. Сравнение результатов управления с помощью классической задачи АКОР (xopt[s]) и субоптимального управления (![]() )
)
§ 3. Использование фильтров пониженного порядка в задаче синтеза субоптимальных управлений
Известно, что закон управления, синтезированный методом АКОР, строится на всех переменных состояния объекта. Обычно ряд переменных состояния недоступен непосредственному измерению, и для их восстановления в системах, удовлетворяющих критерию наблюдаемости, используются различные фильтры. В системах с ДШВ имеется возможность приближенного восстановления неизмеряемых компонентов вектора состояния с помощью фильтров пониженного порядка. Предлагается алгоритм приближенной оценки медленной составляющей вектора состояния и медленной фазы быстрой составляющей с помощью фильтра Люенбергера [34, 35] с понижением порядка модели фильтра до размерности медленной фазы.
Пусть непосредственному наблюдению доступна часть ![]() (m-мерный вектор выхода объекта) компонент «физической» медленной фазы
(m-мерный вектор выхода объекта) компонент «физической» медленной фазы ![]() (n1-мерный вектор,
(n1-мерный вектор,  ), т. е.
), т. е.
![]() ,
,
где Hn – m ´ n1-мерная матрица наблюдения. Начальное состояние предполагается неизвестным.
Приведем схему расчета параметров фильтра Люенбергера порядка n1 для приближенного оценивания медленной фазы всех переменных состояния объекта. По существу задача сводится к оценке неизвестного начального состояния.
1. Задается спектр собственных чисел матрицы, «управляющей» динамикой уменьшения ошибки фильтра. Проще всего выбрать собственные числа действительными, различными и по абсолютной величине меньшими единицы. Число задаваемых собственных чисел равно n1.
2. Формируется диагональная матрица Г размерности n1 ´ n1, в которой заданные собственные числа размещаются по диагонали.
3. Задается почти (см. п. 4) произвольная матрица ![]() размерности n1 ´ m, рассчитывается n1 ´ n1 матрица
размерности n1 ´ m, рассчитывается n1 ´ n1 матрица ![]() :
:
![]() ,
,
и формируется матрица собственных векторов Tn со столбцами:
![]() ,
,
где AM – параметр медленного субпроцесса, рассчитывается по формуле (1.8) (гл. 1); E – единичная матрица размерности n1 ´ n1; Гj, j – j-й диагональный элемент матрицы Г; j – номер столбца, j = 1, …, n1.
4. Рассчитывается матрица параметров фильтра Люенбергера Kn:
![]() .
.
Если окажется, что матрица ![]() необратима, следует изменить матрицу
необратима, следует изменить матрицу ![]() .
.
5. Для проверки рассчитываются собственные числа матрицы ![]() , определяющей процесс уменьшения ошибки фильтра. Если расчет проведен правильно, собственные числа должны совпасть с заданными (п.1).
, определяющей процесс уменьшения ошибки фильтра. Если расчет проведен правильно, собственные числа должны совпасть с заданными (п.1).
6. Оценивается медленная фаза медленной составляющей  объекта с ДШВ приближенно (из произвольного начального состояния) по формуле:
объекта с ДШВ приближенно (из произвольного начального состояния) по формуле:
 .
.
7. Оценивается медленная составляющая быстрой фазы с использованием формулы (1.38) (гл. 1) прямым расчетом по результатам восстановления вектора состояния медленной фазы.
8. Поскольку оценки получаются приближенными, необходим этап моделирования (для подтверждения факта достижения нужной точности оценивания при различных факторах, неучтенных при расчете параметров фильтра (неточно известная модель объекта, неучтенные и неконтролируемые возмущения и т. п.).
9. Результаты приближенного оценивания неизмеряемых компонент могут быть использованы для построения регуляторов пониженного порядка (в частности, синтезированных методами АКОР).
Вышеизложенную схему проиллюстрируем на примере системы 4-го порядка (модель и параметры приведены в приложении 1) с двумерными компонентами ![]() (медленная составляющая) и
(медленная составляющая) и ![]() (быстрая составляющая).
(быстрая составляющая).
Матрицы Г и Ф задаются следующим образом:
 ;
;
Производятся расчеты основных параметров фильтра Люенбергера (по схеме, описанной выше); сравнение собственных чисел матрицы  и матрицы Г показывает правильность проведенных расчетов:
и матрицы Г показывает правильность проведенных расчетов:
 .
.
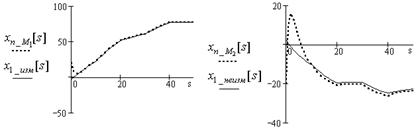
На рис. 35 приведены результаты оценки сходимости первой компоненты вектора медленной фазы ![]() к истинному измеряемому значению x1_изм[s] (рис.35а) и второй компоненты вектора медленной фазы
к истинному измеряемому значению x1_изм[s] (рис.35а) и второй компоненты вектора медленной фазы  к истинному неизмеряемому значению x1_неизм[s] (рис. 35б ).
к истинному неизмеряемому значению x1_неизм[s] (рис. 35б ).
а) б)
Рис. 35. Иллюстрация сходимости оценки медленной фазы![]()
к истинному значению первой компоненты x1[s].
Как видно из рис. 35, измеряемая компонента с высокой точностью восстанавливается с помощью фильтра пониженного порядка (рис. 35а). На графике (рис. 35б) виден эффект неучтенной быстрой динамики (проявляется в отклонениях оценки от истинного значения неизмеряемой компоненты).
На рис. 36 приведен результат оценки сходимости одной из компонент вектора быстрой фазы  к истинному значению неизмеряемой компоненты x2_неизм[s].
к истинному значению неизмеряемой компоненты x2_неизм[s].
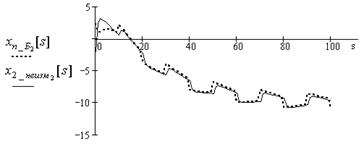
Рис. 36. Иллюстрация сходимости оценки второй компоненты быстрой фазы ![]() к истинному значению неизмеряемой компоненты
к истинному значению неизмеряемой компоненты 
По рис. 36 видно, что при оценке неизмеряемых компонент быстрой фазы фильтром пониженного порядка требуется учет динамики быстрой составляющей (особенно в моменты смены управляющих или задающих воздействий).
На рис. 37, 38 приведены результаты сравнения работы фильтра пониженного порядка и фильтра, рассчитанного для полноразмерной модели объекта.
|
|
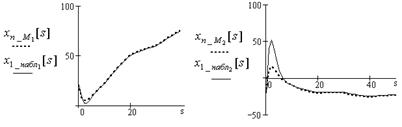
Рис. 37. Иллюстрация сходства оценки медленной фазы пониженного порядка  и оценки, полученной с помощью обычного фильтра Люенбергера
и оценки, полученной с помощью обычного фильтра Люенбергера 
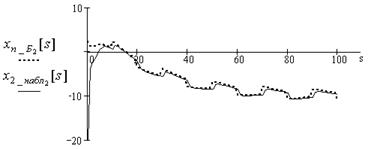
Рис. 38. Иллюстрация сходства оценки быстрой фазы пониженного порядка 
и оценки, полученной с помощью обычного фильтра Люенбергера 
Как видно из рисунков, оценка с помощью фильтра пониженного порядка почти полностью совпадает с оценкой обычного фильтра. Отличия наблюдаются в области начальных условий или смены задающих воздействий (т. е. в зоне пограничного слоя), где необходим учет динамики быстрой фазы.
§ 4. Выводы
1. Разработана процедура синтеза субоптимальных управляющих воздействий в рамках задачи АКОР для объектов, имеющих в своем составе субпроцессы с существенно различными инерционными характеристиками.
2. На примере задачи управления объектом четвертого порядка проведено сопоставление качества управления в системе, алгоритмы для которой синтезированы на базе моделей пониженного порядка, с качеством управления, достижимым в строго оптимальной системе, синтезированной методом АКОР с полноразмерной моделью объекта. Результаты моделирования показывают, что использование возможностей понижения порядка моделей объекта, предоставляемых методом ДШВ, позволяет получить работоспособные субоптимальные алгоритмы, причем качество управления при их использовании близко к достижимому в строго оптимальной системе.
3. Разработаны алгоритмы оценивания неизмеряемых компонент медленной составляющей вектора состояния на основе применения фильтра Люенбергера пониженного порядка. Проведено моделирование алгоритмов оценивания и сопоставление результатов с оценками, получаемыми с помощью полноразмерного фильтра. Результаты исследования позволяют сделать вывод о возможности использования фильтров пониженного порядка в задачах синтеза субоптимальных алгоритмов управления.
Заключение
1. Изложены результаты разработки методики моделирования многомерных линейных дискретных систем управления на основе метода декомпозиции модели объекта с существенно различными инерционными характеристиками. Определены условия, позволяющие проверить наличие свойства ДШВ в объекте без расчета собственных чисел.
2. Описана разработанная схема моделирования системы по методу ДШВ для оценки точности аппроксимации объекта только медленной составляющей. Проверка методики проведена на примере моделирования динамики изменения скорости вращения (медленный субпроцесс) и тока в якорной цепи (быстрый субпроцесс) электродвигателя постоянного тока. Полученные результаты подтверждают возможность использования при управлении данным объектом метода ДШВ.
3. Изложены результаты разработки алгоритмического обеспечения для «двушкального» цифрового ПИ-регулятора. Построение такого регулятора учитывает различие в инерционных характеристиках объекта и позволяет управлять многомерными объектами без существенного усложнения технического обеспечения.
4. Разработана система показателей качества для оценки эффективности введения ДШВ в систему управления. Проведены исследования эффективности применения ДШВ на модели электродвигателя постоянного тока, которые подтверждают основные теоретические положения метода ДШВ.
5. Приведена методика обоснования области эффективного использования алгоритмов управления с ДШВ в составе алгоритмического обеспечения АСУТП. Показано, что при заданных ресурсах техники управления и характеристиках разнотемповости процессов в объекте эта область определяется частотой изменений задающих воздействий, при которой достигается компромисс между требованием обеспечить высокое качество управления быстрым процессом, с одной стороны, и стремлением высвободить ресурс времени управляющей системы для реализации дополнительных информационных функций АСУТП, с другой стороны.
6. Разработана процедура нахождения субоптимального решения задачи АКОР на основе использования моделей пониженного порядка для приближенного описания динамики объектов, имеющих в своем составе субпроцессы с существенно различными инерционными характеристиками.
7. Проведены исследования применения фильтров пониженного порядка в системах с ДШВ. Результаты исследования позволяют сделать вывод о возможности использования фильтров пониженного порядка в задачах синтеза субоптимального управления.
ЛИТЕРАТУРА
1. Буров разделения движений в задачах анализа и синтеза дискретных систем с вектором скорости в законе управления // Автоматическое управление объектами с переменными характеристиками: Межвуз. сб. / Новосиб. электротехн. ин-т. – Новосибирск, 1986. – С. 86–91.
2. , Геращенко разделения движений и оптимизация нелинейных систем. – М.: Наука, 1975. – 296 с.
3. , Хиленко понижения порядка и исследование динамических систем. – Киев: УМК ВО, 1988. – 164 с.
4. Saksena V. R., O'Reilly J., Kokotovic P. V. Singular Perturbations and Time-scale Methods in Control Theory: Survey 1976–1983 // Automatica, Vol.20, №pp. 273–293.
5. Phillips R. G. Reduced order modeling and control of two-time-scale discrete systems // Control, Vol. 31, № 4, 1980. pp. 765–780.
6. Hapaev M. M., Filatov O. P. Averaging of differential inclusions with slow and fast variables // Math. Zametky № 47, 1990. pp. 102–109.
7. Гайцгори системами с быстрыми и медленными движениями. – М.: Наука, 1991. – 224 с.
8. Крутько влияния малых параметров на динамику управляемых систем // Теория и системы управления. – 2000. – № 6. – С. 5–17.
9. Юркевич нелинейных нестационарных систем управления с разнотемповыми процессами. – СПб.: Наука, 2000. – 288 с.
10. , Гайцгори , агрегирование и приближенная оптимизация. – М.: Наука, 1979. – 342 с.
11. Litkuhi B., Khalil H. Multirate and composite control of two-time scale discrete-time scale systems // IEEE Trans. Automatic Control Vol. AC–30, 1985. pp. 645-651.
12. Mahmoud M. S. Stabilization of discrete systems with multi-rate scales // IEEE Trans. Automatic control, Vol. AC-31, № 2, 1986. pp. 159–162.
13. Mahmoud M. S. Structural properties of discrete systems with slow and fast models. UMIST Control Systems center report № 000, 1981.
14. Grammel G. Limits of nonlinear discrete-time control systems with fast subsystems // Systems&Control Letters, № 36, 1999. pp. 277–283.
15. Крушель поддержка изучения задач оценки состояния и управления дискретными динамическими системами // Труды II-й международной конференции «Идентификация систем и задачи управления SicPRO'03». – М.: Изд-во Института проблем управления им. Российской академии наук, 2003. – С. 2578–2597.
16. , Степанченко моделирование разнотемповых дискретных систем управления // Математические методы в технике и технологиях: Сб. тр. XVI Междунар. науч. конф.: В 10 т. Т. 6. Секции 9,13 / Под общ. ред. . – Ростов н/Д: РГАСХМ ГОУ, 2003. – С. 123–126.
17. , Степанченко и моделирование дискретных систем управления с двойной шкалой времени // Математика. Компьютер. Образование: Сб. научн. тр. Вып. 8. Ч. II / Под ред. . – М.: Прогресс-Традиция, 2001. – С. 517–522.
18. , Степанченко оценки состояния и линейно-квадратичной оптимизации для управляющих систем с двойной шкалой времени // Труды IY-й международной конференции «Идентификация систем и задачи управления SicPRO'05». – М.: Изд-во Института проблем управления им. Российской академии наук, 2005. – С. 1428–1447.
19. О моделировании линейных законов управления динамическими объектами с учетом двойного временного шкалирования // Наука Кубани. Библиотека журнала: Сб. науч. тр. – Краснодар, 2001. – С. 192–201.
20. Степанченко алгоритмов управления дискретными разнотемповыми процессами с учетом двойного временного шкалирования. Синтез и моделирование дискретных систем управления с двойной шкалой времени // Математика. Компьютер. Образование: Сб. научн. тр. Ч. II / Под ред. . – Москва–Ижевск: Научно-издательский центр «Регулярная и хаотическая динамика», 2001. – С. 562–572.
21. Фомин управления линейными дискретными объектами.
– Л.: Изд-во ЛГУ, 1985. – 336 с.
22. Цициашвили анализ сложных систем: Автореф. дис. … д-ра физ.-мат. наук: 01.01.11;01.02.05. – Владивосток, 1992. – 22 с.
23. Шаршеналиев систем с разделяемыми движениями и ограниченными ресурсами. – Фрунзе: Илим, 1980. – 197 с.
24. Карелин применения детерминированного идентификатора при синтезе закона оптимального управления для оценивания состояния системы // Приборы и системы. Управление, контроль, диагностика. – 2001. – № 10. – С. 1–8.
25. Александров регуляторов многомерных систем. – М.: Энергия, 1986. – 272 с.
26. Карелин многошаговой временной декомпозиции при синтезе субоптимальных законов управления многомерными объектами в пространстве состояний // Приборы и системы. Управление, контроль, диагностика. – 2001. – № 7. – С. 1–7.
27. Теория линейных систем. (Метод пространства состояний) / Пер. с англ. – М.: Наука, 1970. – 703 с.
28. Метод пространства состояний в теории дискретных линейных систем управления. – М.: Наука, 1985. – 296 с.
29. Востриков и адаптивные системы: Учеб. пособие / Новосиб. электротехн. ин-т. – Новосибирск, 1977. – 65 с.
30. Методы классической и современной теории автоматического управления: Учебник. В 3 т. Т. 2: Синтез регуляторов и теория оптимизации систем автоматического управления / Под ред. . – М.: Изд-во МГТУ им. , 2000. – 736 с.
31. Astrom К. J., Wittenmark В. Computer-controlled system. Theory and design. Prentice-Hall, 1984.
32. , Попов систем автоматического регулирования. – М.: Наука, 1975. – 768 с.
33. Александров и адаптивные системы. – М.: ВШ, 1989. – 262 с.
34. Александров регуляторов многомерных систем. – М.: Энергия, 1986. – 272 с.
35. Хо Ю-ши. Прикладная теория оптимального управления. – М.: Мир, 1972. – 544 с.
Приложение 1
модель, рассматриваемая в качестве примера в главах 1, 3
Порождающая модель объекта описывается линейным дифференциальным уравнением в терминах пространства состояний:
![]() , (П1.1)
, (П1.1)
где x(t) – вектор состояния объекта размерности n ´ 1 (n = 4); u(t) – вектор управляющих воздействий размерности r ´ 1 (r = 2); A, B – параметры объекта непрерывной модели размерности n ´ n и n ´ r соответственно:
 .
.
Начальные условия x(0) заданы так:  .
.
В векторе x(t) можно выделить две группы субпроцессов:
медленная составляющая ![]() размерности n1´1 (n1 = 2);
размерности n1´1 (n1 = 2);
быстрая составляющая ![]() размерности n2´1 (n2 = 2).
размерности n2´1 (n2 = 2).
Для проведения моделирования модель (П1.1) преобразуется к виду
![]() ,
,
где  .
.
Дискретизация модели производится с интервалом Dt = 2. Время моделирования tmax = 100 c, дискретное время s = 0, 1, …, N (N = tmax/Dt = 50).
Начальные условия для модели с сепаратными составляющими
![]()
рассчитываются следующим образом:
![]() ,
,
где ![]() ; E – единичная матрица размерности n2 ´ n2;
; E – единичная матрица размерности n2 ´ n2;  .
.
![]() .
.
Для проверки возможности применения метода ДШВ используются следующие параметры:
 , где
, где ![]() – евклидова норма матрицы.
– евклидова норма матрицы.

![]() , где
, где ![]()
На этапе моделирования рассчитываются параметры объекта матрицы Abound, Bbound с учетом нового интервала дискретизации dt = mDt:
 .
.
Количество тактов быстрого времени в одной дискрете медленного рассчитывается следующим образом:
 ,
,
где округл( ) – функция, округляющая до ближайшего целого «сверху».
Для получения большего эффекта ДШВ в пограничном слое задаются ненулевые управляющие воздействия (рис. П1.1)
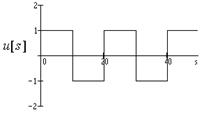
Рис. П1.1. Периодическое управляющее воздействие
Амплитуда управляющего воздействия изменяется в пределах [–1; 1] с интервалом постоянства 10 тактов.
Приложение 2
модель электродвигателя постоянного тока
Используется известная математическая модель электродвигателя постоянного тока двойного питания (рис. П2.1), которая затем приводится к стандартной форме описания линейной системы в состояниях.
Рис. П2.1. Схема электродвигателя постоянного тока с двойным питанием:
Ф – магнитный поток; U – напряжение; I – ток в якорной цепи; МН – нагрузка на валу двигателя; R – сопротивление
Цель управления – стабилизация скорости вращения (W) за счет изменения магнитного потока (Ф) и (или) напряжения (U) питания цепи якоря при изменяющейся нагрузке на валу двигателя (МН).
Введем обозначения для описания электродвигателя как системы управления. Управляющие воздействия – напряжение (U) и магнитный поток (Ф); возмущающее воздействие – момент нагрузки на валу двигателя (МН); выход объекта – скорость вращения вала двигателя (W).
Для составления математической модели электродвигателя используем законы механики и электротехники. Согласно второму закону Ньютона для вращающихся тел
![]() , (П2.1)
, (П2.1)
где J – момент инерции всех вращающихся частей, приведенный к валу двигателя (константа); MД – момент двигателя.
![]() , (П2.2)
, (П2.2)
где kД – коэффициент момента (константа), вычисляется по формуле
 , (MД0, I0, Ф0 – паспортные (номинальные) данные).
, (MД0, I0, Ф0 – паспортные (номинальные) данные).
Используем дифференциальный закон Ома для нахождения тока в якорной цепи.
![]() , (П2.3)
, (П2.3)
где L – индуктивность; R – сопротивление; EД – противоЭДС, развиваемая двигателем при вращении.
Для нахождения противоЭДС используем уравнение для рамки с током в магнитном поле:
![]() , (П2.4)
, (П2.4)
где kE – коэффициент ЭДС (константа), вычисляется по формуле:
![]() ,
,
(EД0, W0, Ф0 – паспортные данные двигателя – номинальные значения).
В результате получилась система четырех уравнений (П2.5), достаточная для описания двигателя:
 (П2.5)
(П2.5)
где I, W – переменные состояния.
Учитывая, что уравнения (П2.2) и (П2.4) не дифференциальные, а алгебраические, приведем систему (П2.5) к виду:
 (П2.6)
(П2.6)
Система (П2.6) является нелинейной (из-за произведения переменных состояния на управляющие воздействия). Для того чтобы полученную математическую модель привести к стандартной форме (П2.7), необходимо линеаризовать систему уравнений (П2.6).
![]() (П2.7)
(П2.7)
где x – вектор состояния размерности 2 ´ 1; u – вектор управлений, размерности 2 ´ 1; f – возмущающее воздействие (скаляр); A, B, C – матрицы параметров объекта размерности 2 ´ 2, 2 ´ 2 и 2 ´ 1 соответственно.
Используя известную технику линеаризации модели (разложение в ряд в окрестности номинального режима и отбрасывание слагаемых ряда выше 1-го порядка), получим:
![]() (П2.8)
(П2.8)
где  ,
,  ,
, ![]() , (П2.9)
, (П2.9)
индекс «Н» обозначает номинальные значения соответствующих переменных.
Параметры конкретного объекта и данные о номинальном режиме, использованные в главах 1, 2 при моделировании:
1. Сопротивление якорной цепи R = 1 Ом.
2. Индуктивность якорной цепи L = 1 гн.
3. Момент инерции ротора J = 0.5 н*с/(об/мин).
4. Коэффициент двигателя kd = 4.804.
5. Коэффициент обмотки возбуждения ke = 0.546.
В задаче имеется 5 переменных (U, M, I, W, Ф). Только три из них можно задать по паспортным данным двигателя, а две остальные (по числу переменных состояния) нужно вычислить из уравнений статического режима - так, чтобы производные ![]() и
и ![]() были равны 0. Иначе получится, что начальные условия не будут нулевыми, и в системе будут переходные процессы даже в отсутствии отклонений от номинальных условий.
были равны 0. Иначе получится, что начальные условия не будут нулевыми, и в системе будут переходные процессы даже в отсутствии отклонений от номинальных условий.
Зададим, например, следующие номинальные значения:
– номинальное значение напряжения питания якорной цепи UН = 220 В.
– номинальный ток в якорной цепи IН = 12.2 А.
– номинальное значение магнитного потока ФН = 0.244 вб.
Тогда значение остальных номинальных данных можно вычислить по формулам (получаются путем приравнивания правой части уравнений к нулю).
Номинальное значение момента нагрузки МН = kdIНФН = 14.301 н.
Номинальное значение скорости вращения  об/мин.
об/мин.
В результате расчета по формулам (П2.8) и (П2.9) получены следующие числовые значения параметров линеаризованной модели:
 .
.
Вычислительные эксперименты, проведенные с целью проверки адекватности линеаризованной модели, показали, что при управлении скоростью вращения путем изменения напряжения питания якорной цепи (магнитный поток, создаваемый обмоткой возбуждения, остается неизменным) точность линеаризованной модели очень высокая. Использование управления изменением магнитного потока приводит к небольшим (но заметным) расхождениям между расчетами по исходной и линеаризованной моделям. Поэтому в основном тексте (относящемся к управлению линейными дискретными процессами) рассматривалась линейная модель управления скоростью вращения электродвигателя со скалярным управляющим воздействием (напряжением питания якорной цепи). Параметры модели:
 .
.
Приложение 3
Решение задачи аналитического конструирования оптимальных регуляторов с критерием специального вида
Постановка задачи: найти последовательность управляющих воздействий r-мерных векторов u[s], s = 0, 1, …, N – 1, N – задано, доставляющих минимум квадратичному критерию.
 (П3.1)
(П3.1)
где K[N], Q[s] – заданные n ´ n неотрицательно определенные матрицы; R[s] – заданная r ´ r положительно определенная матрица; y[N], x[s] – заданные n-мерные векторы; Q[s] – заданный r-мерный вектор; H[s] – заданная n ´ r матрица; M[N], V[s] – заданные скаляры.
Вектор состояния x[s] в (П3.1) (размерности n´1) удовлетворяет системе линейных равенств, имеющих смысл модели объекта
![]() , (П3.2)
, (П3.2)
где A[s], B[s] – заданные n ´ n, n ´ r матрицы; j[s] – n ´ 1 детерминированный вектор внешних воздействий.
Начальное состояние x[0] задано.
Модель (П3.2) не отличается от принятой в классической задаче АКОР. Но критерий (П3.1) специфичен. Его отличительной особенностью является наличие слагаемых, содержащих квадратичную связь между переменными состояния и управляющими воздействиями ( ) и линейную комбинацию компонент вектора управлений (
) и линейную комбинацию компонент вектора управлений (![]() ). Как показано в гл. 3, задача с таким критерием может быть использована для синтеза субоптимального управления объектом с разнотемповыми составляющими. Возможно, есть и другие задачи, в которых встречается такой критерий.
). Как показано в гл. 3, задача с таким критерием может быть использована для синтеза субоптимального управления объектом с разнотемповыми составляющими. Возможно, есть и другие задачи, в которых встречается такой критерий.
Схема решения задачи (П3.1), (П3.2). Используется процедура динамического программирования Р. Беллмана методически так же, как и при решении классической задачи АКОР.
1. Оптимальное значение части критерия I, оставшейся на N-м шаге (в предположении, что существующие N-1 шагов завершены) равно:
 . (П3.3)
. (П3.3)
Как видно из (П3.3), Iopt[N] является функцией вектора состояния x[N], в котором аккумулированы все предшествующие управляющие воздействия.
2. Используя принцип оптимальности Р. Беллмана, запишем часть критерия, минимизация которой определяет управляющие воздействия uopt[N – 1] в зависимости от вектора состояний x[N – 1].
 (П3.4)
(П3.4)
3. Производится подстановка модели (П3.2) в (П3.4) для представления x[N] через x[N – 1], u[N – 1]. Используя условие минимизации
 ,
,
где ![]() – градиент критерия по управляющим воздействиям:
– градиент критерия по управляющим воздействиям:
 ,
,
находим форму зависимости оптимальных управляющих воздействий от вектора состояния текущего такта
 .
.
4. Подставляя ![]() в (П3.4), приведем критерий к форме, аналогичной (П3.3)
в (П3.4), приведем критерий к форме, аналогичной (П3.3)
![]() . (П3.5)
. (П3.5)
Опуская довольно громоздкие (но простые) выкладки, приведем сводку рекуррентных матричных соотношений, позволяющих рассчитать оптимальные значения управляющих воздействий.
Оптимальные управляющие воздействия рассчитываются в контуре обратной связи по вектору состояния объекта:
 , П(3.6)
, П(3.6)
где слагаемое ![]() – такое же, как в расчете оптимальных управлений для классической задачи АКОР. Остальные слагаемые специфичны:
– такое же, как в расчете оптимальных управлений для классической задачи АКОР. Остальные слагаемые специфичны:
 (П3.7)
(П3.7)
Параметры K[s], y[s] рассчитываются при попятном отсчете тактов s, начиная с N – 1 (K[N], y[N] – заданы в (П3.1))
 (П3.8)
(П3.8)
 (П3.9)
(П3.9)
Значение критерия (П3.1) при использовании оптимальных управляющих воздействий равно
![]() , (П3.10)
, (П3.10)
где x[0] – заданное начальное состояние; K[0], y[0] – получаются в результате рекуррентных расчетов по (П3.8), (П3.9); M[0] – скаляр, получается рекурсивно в обратном отсчете тактов s, начиная с N – 1 (M[N] – задано в (П3.1))
 (П3.11)
(П3.11)
дЛЯ ЗАМЕТОК
дЛЯ ЗАМЕТОК

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
