
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
КПДП выполняет следующие функции:
1. Управление инициируемой ЦП или ПУ передачей данных между ОП и ПУ.
2. Задание размера блока данных, который подлежит передаче, и области памяти, используемой при передаче.
3. Формирование адресов ячеек ОП, участвующих в передаче.
4. Подсчет числа единиц данных (байт, слов), передаваемых от ОП к ПУ или обратно, и определение момента завершения операции ввода-вывода.
КПДП может быть как один на несколько ПУ, так и каждое ПУ может иметь свой КПДП.
 При инициализации операции ввода-вывода в ТСчД заносится размер подлежащего передаче блока (число байт или слов), а в РгТАД – начальный адрес области памяти, используемой при передаче. При передаче каждого байта содержимое РгТАД увеличивается на 1, при этом формируется адрес очередной ячейки ОП, участвующей в передаче. Одновременно уменьшается на 1 содержимое ТСчД. Обнуление ТСчД указывает на завершение передачи. Контроллер ПДП обычно имеет более высокий приоритет в занятии цикла памяти по сравнению с процессором.
При инициализации операции ввода-вывода в ТСчД заносится размер подлежащего передаче блока (число байт или слов), а в РгТАД – начальный адрес области памяти, используемой при передаче. При передаче каждого байта содержимое РгТАД увеличивается на 1, при этом формируется адрес очередной ячейки ОП, участвующей в передаче. Одновременно уменьшается на 1 содержимое ТСчД. Обнуление ТСчД указывает на завершение передачи. Контроллер ПДП обычно имеет более высокий приоритет в занятии цикла памяти по сравнению с процессором.
Когда пересылка завершена (при нулевом значении в ТСчД), КПДП снимает сигнал «Запрос ПДП», в ответ на что ЦП снимает сигнал «Подтверждение ПДП» и вновь берет на себя управление системной шиной, то есть ЦП вовлечен в процесс ввода/вывода только в начале и конце передачи.
Эффективность ПДП зависит от того, каким образом реализовано распределение системной шины между ЦП и КПДП в процессе пересылки блока. Здесь может применяться один из трех режимов:
■ блочная пересылка;
■ пропуск цикла;
■ прозрачный режим.
При блочной пересылке КПДП полностью захватывает системную шину с момента начала пересылки и до момента завершения передачи всего блока. На весь этот период ЦП не имеет доступа к шине.
В режиме пропуска цикла КПДП после передачи каждого слова на один цикл шины освобождает системную шину, предоставляя ее на это время процессору. Поскольку КПДП все равно должен ждать готовности ПУ, это позволяет ЦП эффективно распорядиться данным обстоятельством.
В прозрачном режиме КПДП имеет доступ к системной шине только в тех циклах, когда ЦП в ней не нуждается. Это обеспечивает наиболее эффективную работу процессора, но может существенно замедлять операцию пересылки блока данных.
На практике используется следующий механизм:
КПДП инициализирует регистры РгТАД ТСчД сам, считывая управляющие слова (УС) из области ОП, которую ему укажет процессор. Эта последовательность управляющих слов наз. программа работы КПДП, её формирует процессор.
Формат УС.
КОП | Начальный адрес | размер |
Регистр, куда пишется УС содержит не менее 4 слов. При завершении обработки очередного УС, КПДП посылает запрос на прерывание и устанавливает соотв. бит в состояние завершения. CPU анализирует бит, если он в заверш. состоянии, то процессор разрешает контроллеру выполнение следующ. команды.
31)Сопроцессоры (каналы) ввода–вывода: назначение структуры, режимы работы. Основное отличие сопроцессора ввода–вывода и контроллера ПДП.
Классификация сопроцессоров I/O
В зависимости от соотношения быстродействия ОП и ПУ в каналах I/O могут реализовываться два режима работы: монопольный (селекторный), разделения времени (мультиплексирования).
Монопольный режим. После установки связи между каналом и ПУ последнее монополизирует канал на все время, пока полностью не завершится инициированная процессором программа управлением сопроцессором I/O работы с данным ПУ и не будут произведены все предусмотренные этой программой передачи данных между ОП и ПУ. На все время выполнения данной программы I/O канал оказывается занятым для других ПУ.
Режим разделения времени (мультиплексный). Несколько ПУ разделяют во времени канал I/O, при этом каждое из параллельно работающих с данным каналом ПУ связывается с каналом на короткие промежутки времени только после того, как ПУ подготовлено к приему или выдаче очередной порции информации. Промежуток времени, в течение которого происходит передача информации между каналом и подготовленным к этому ПУ, может быть назван сеансом связи. Сеансы связи различных ПУ чередуются между собой. Во время сеанса связи одного из устройств с каналом другие устройства могут выполнять работу не требующую использования средств канала.
В соответствии с преимущественно реализуемым режимом работы различают каналы I/O мультиплексный, осуществляющий мультиплексирование ПУ, и селекторный, взаимодействующий с ПУ в монопольном режиме.
В монопольном режиме после установления связи между каналом и ВУ последнее монополизирует канал на все время до завершения инициированной процессором канальной программы и всех предусмотренных этой программой пересылок данных между ВУ и ОП. На все время выполнения канальной программы канал оказывается недоступным для других ВУ. Данную процедуру обеспечивает селекторный канал ввода/вывода. Отметим, что в блок-мультиплексном канале в рамках сеанса связи пересылка блока осуществляется в монопольном режиме.
 |
СПВВ работая в селекторном режиме может вести обмен только с одним ПУ, при этом могут одновременно работать несколько ПУ, но обмен СПВВ будет вести только с одним. При работе
|
С учетом производительности ВУ в КВВ реализуются два режима работы: мультиплексный (режим разделения времени) и монопольный.
В мультиплексном режиме несколько внешних устройств разделяют канал во времени, при этом каждое из параллельно работающих с каналом ВУ связывается с КВВ на короткие промежутки времени только после того, как ВУ будет готово к приему или выдаче очередной порции информации (байта, группы байтов и т. д.). Такая схема принята в мультиплексном канале ввода/вывода. Если в течение сеанса связи пересылается один байт или несколько байтов, образующих одно машинное слово, канал называется байт-мультиплексным. Канал, в котором в пределах сеанса связи пересылка данных выполняется поблочно, носит название блок-4 мультиплексного.
|
 |
Мультиплексный канал обслуживает несколько параллельно работающих ПУ, попеременно организуя с ними сеансы связи для передачи между ОП и ПУ небольших порций информации (1 байта или нескольких). Если несколько ПУ готовы к сеансу связи и запрашивают обслуживание со стороны мультиплексного канала, то канал выбирает одно из них в соответствии с принятыми для данной системы приоритетными правилами, например в порядке подключения устройств к каналу. Остальные устройства, готовые к сеансу связи, должны ожидать, когда подойдёт очередь их обслуживания. Мультиплексный канал, предназначен главным образом для работы со сравнительно медленными устройствами, способными ожидать обслуживание без потери информации. Аппаратурные средства мультиплексного канала можно разделить на две части: средства предназначенные для обслуживания отдельных ПУ, присоединённых к каналу, и оборудования, являющимся общим для всех устройств и разделяемой со всеми устройствами во времени.
Число подканалов, определяет число одновременно работающих с данным каналом ПУ. Физически подканал реализуется в виде участка памяти, в котором хранятся параметры операции ввода-вывода, выполняемой данным устройством: текущее значение адреса и счётчика данных, код и указатели операции ввода-вывода. В качестве памяти для хранения данных параметров может использоваться либо специализированная память, встроенная в мультиплексный канал, либо участок ОП машины.
32)Принципы организации контроля функционирования ЭВМ. Классификация методов контроля. Контроль оперативной памяти.
В производимых ЭВМ преобразованиях информации очень важна их достоверность, для этого используются различные методы контроля функционирования ЭВМ. Наличие системного контроля закладывается на этапе проектирования ЭВМ. Системный контроль тесно взаимодействует с системами диагностики. Вне зависимости от того, как именно реализуется контроль и исправление ошибок, в основе их всегда лежит введение некоторого рода избыточности.
Аппаратный:
Наличие аппаратного контроля означает, что операционный контроль осуществляется непосредственно во время процесса выполнения операций. При введении аппаратного контроля вводится избыточность разрядов (пространственная).
Должен обеспечивать:
1) контроль данных
2) контроль команд – имеется дескриптор выполняемости, если он взведен – это команда, иначе – данные.
3) контроль адресов – не выходит ли адрес за пределы сегмента (при сегментно-страничной организации)
Оперативный контроль – это контроль, который производится постоянно:
- сквозной (контролируются все устройства)
- локальный (контролируется конкретное устройство)
Встроенный контроль – контроль, при котором в систему встраиваются специальные датчики, которые контролируют электрические параметры. Чаще всего используются в источниках питания.
Тестовый – различного рода тестирование:
- контролирующий – тестовые программы с заранее известным результатом
- диагностирующий – тестовые программы, выявляющие место сбоя
Программно-логический контроль:
Контроль основан на формировании результата выполнения операции 2-мя различными независимыми путями и дальнейшем их сравнении. Необходимо выявлять как случайные ошибки, так и ошибки вызванные отказами.
Можно выделить следующие методы:
- метод программного счета. Одна и та же программа прокручивается несколько раз, зачастую достаточно двух прогонов. Плохо определяются ошибки вызванные отказами.
- метод обратного счета. Сначала решается прямая задача, затем обратная, при этом возникает необходимость писать 2 программы, сравнивать результаты прямого и обратного счета с учетом погрешностей. Выгоден только при небольших размерах обратного алгоритма.
- решение задачи по двум алгоритмам: более и менее точному. Недостатки: необходимость написания двух программ; собственно, поиск второго, более простого, алгоритма.
- метод контрольных точек. В этом случае в программу вводится процедура для выполнения контроля. Этот метод реагирует не на случайные ошибки, а на отказ.
2-ой и 3-ий методы взаимодополняют друг друга.
Для реализации контроля вводится избыточность:
1) временная – увеличение времени выполнения операций для контроля.
2) пространственная – увеличение разрядности данных для контроля.
Обнаружение и исправление ошибок

При работе с полупроводниковой памятью не исключено возникновение различного рода отказов и сбоев. Причиной отказов могут быть производственные дефекты, повреждение микросхем или их физический износ. Проявляются отказы в том, что в отдельных разрядах одной или нескольких ячеек постоянно считывается 0 или 1, вне зависимости от реально записанной туда информации. Сбой - это случайное событие, выражающееся в неверном считывании или записи информации в отдельных разрядах одной или нескольких ячеек, не связанное с дефектами микросхемы. Как отказы, так и сбои крайне нежелательны, поэтому в большинстве систем основной памяти содержатся схемы, служащие для обнаружения и исправления ошибок.
Рассмотрим принципы контроля, связанные с введением избыточных данных.
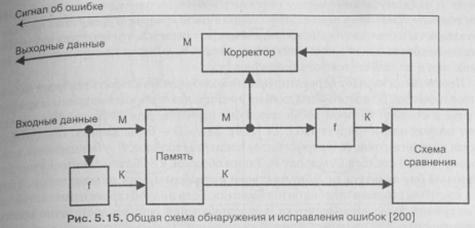 На рисунке показано, каким образом осуществляются обнаружение и исправление ошибок. Перед записью М-разрядных данных в память производится их обработка, обозначенная на схеме функцией «f», в результате которой формируется добавочный К-разрядный код. В память заносятся как данные, так и этот вычисленный код, то есть (М+К)-разрядная информация. При чтении информации повторно формируется К-разрядный код, который сравнивается с аналогичным кодом, считанным из ячейки. Сравнение приводит к одному из трех результатов:
На рисунке показано, каким образом осуществляются обнаружение и исправление ошибок. Перед записью М-разрядных данных в память производится их обработка, обозначенная на схеме функцией «f», в результате которой формируется добавочный К-разрядный код. В память заносятся как данные, так и этот вычисленный код, то есть (М+К)-разрядная информация. При чтении информации повторно формируется К-разрядный код, который сравнивается с аналогичным кодом, считанным из ячейки. Сравнение приводит к одному из трех результатов:
- Не обнаружено ни одной ошибки. Извлеченные данные подаются на выход памяти.
- Обнаружена исправимая ошибка. Биты данных и добавочного кода подаются на схему коррекции. После исправления ошибки в данных они поступают на выход памяти.
- Обнаружена неисправимая ошибка. Выдается сообщение о неисправимой ошибке.
Коды, используемые для подобных операций, называют корректирующими кодами или кодами с исправлением ошибок.
В основе корректирующих кодов лежит следующая идея. Для контроля двоичного информационного кода длиной М бит добавим к ней К дополнительных контрольных разрядов. В этом случае из возможных N = 2М"К комбинаций интерес представляют только L = 2м последовательностей, которые называют: разрешенными. Оставшиеся N - L последовательностей назовем запрещенными. Если при обработке (записи в память, считывании или передаче) разрешенной кодовой последовательности произойдут ошибки и возникнет одна из запрещенных последовательностей, то тем самым эти ошибки обнаруживаются. Если же ошибки превратят одну разрешенную последовательность в другую, то такие ошибки не могут быть обнаружены. Благодаря свойствам контрольных разрядов, характерным для конкретных методов контроля, в некоторых случаях возможно определить не только наличие, но и местоположение ошибки, а также произвести её коррекцию.
Простейший вид корректирующего кода основан на добавлении к каждому байту информации одного бита паритета. Бит паритета — это дополнительный бит, значение которого устанавливается таким, чтобы суммарное число единиц в данных, с учетом этого дополнительного разряда, было четным (или нечетным). При чтении из памяти вычисляется бит паритета для считанных информационных битов, результат сравнивается с битом паритета, вычисленным при записи и хранившимся в памяти. Метод позволяет обнаружить ошибку, если исказилось нечетное количество битов, при четном числе ошибок метод неработоспособен. Данный метод позволяет только обнаруживать ошибки, причём местоположение ошибки остаётся неизвестным.
Существует более совершенный метод, основанный на использовании битов паритета. При его использовании биты данных представляются в виде матрицы, к каждой строке и столбцу которой добавляется бит паритета. Для 64-разрядных данных этот подход иллюстрирует таблица 1:
Таблица 1. Формирование корректирующего кода для 64-битовых данных
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
0 | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7 | C0 |
1 | D8 | D9 | D10 | D11 | D12 | D13 | D14 | D15 | C1 |
2 | D16 | D17 | D18 | D19 | D20 | D21 | D22 | D23 | C2 |
3 | D24 | D25 | D26 | D27 | D28 | D29 | D30 | D31 | C3 |
4 | D32 | D33 | D34 | D35 | D36 | D37 | D38 | D39 | C4 |
5 | D40 | D41 | D42 | D43 | D44 | D45 | D46 | D47 | C5 |
6 | D48 | D49 | D50 | D51 | D52 | D53 | D54 | D55 | C6 |
7 | D56 | D57 | D58 | D59 | D60 | D61 | D62 | D63 | C7 |
K0 | K1 | K2 | K3 | K4 | K5 | K6 | K7 | P |
Здесь D — биты данных, С — столбец битов паритета строк, К — строка битов паритета столбцов, Р — бит паритета, контролирующий столбец С и строку К. Таким образом, к 64 битам данных нужно добавить 17 бит паритета: по 8 бит на строки и столбцы и один дополнительный бит для контроля строки и столбца битов паритета. Если в одной строке и одном столбце обнаружено нарушение паритета, для исправления ошибки достаточно просто инвертировать бит на пересечении этих строки и столбца. Если ошибка паритета выявлена только в одной строке или только одном столбце либо одновременно в нескольких строках и столбцах, фиксируется многобитовая ошибка и формируется признак невозможности коррекции.
Недостаток рассмотренного приема в том, что он требует большого числа дополнительных разрядов. Более эффективным представляется код, предложенный Ричардом Хэммингом и носящий его имя (код Хэмминга).
В качестве иллюстрации использования данной концепции, приведём код, обнаруживающий и исправляющий однобитовые ошибки в 8-разрядных словах.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
