


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Современное методическое и техническое состояние спутниковой альтиметрии позволяет использовать альтиметрические данные при решении различных геодезических задач. В число этих задач входит уточнение геоцентрической системы координат, вывод глобальных моделей геопотенциала, определение детальных характеристик ГПЗ в Мировом океане в виде цифровых моделей высот геоида, уклонений отвесных линий, аномалий силы тяжести, установление и поддержание общеземной системы высот. Одно из основных направлений прикладного использования систем спутниковой альтиметрии связано с обеспечением автономной навигации подводных лодок.
Использование данных спутниковой альтиметрии для решения перечисленных выше геодезических задач имеет следующие особенности:
- высокие требования к точности обработки измерительной информации;
- целесообразность обеспечения максимально полного, детального и однородного покрытия Мирового океана данными спутниковой альтиметрии;
- необходимость тщательного исключения из результатов измерений влияния океанографических и метеорологических факторов [13].
Существенным ограничением метода спутниковой альтиметрии является то, что как метод изучения ГПЗ он не работает на суше. Поэтому для получения глобального покрытия земного шара измерениями гравитационных аномалий данные спутниковой альтиметрии в океанах необходимо комбинировать с данными гравиметрической съемки на суше и море.
Использование систем спутниковой альтиметрии в геодезических приложениях сталкивается также с ограничениями по информативности при выполнении измерений над акваториями, покрытыми льдом. Как следствие данный метод сам по себе не может решить проблему детального определения гравитационных аномалий в высокоширотных районах земного шара (выше 800 с. ш.).
Анализ принципиальных основ и опыта использования спутниковой альтиметрии показал, что основным преимуществом данного метода по сравнению с наземными методами изучения гравитационного поля и фигуры Земли, в частности гравиметрической съемки, можно считать потенциально высокую точность измерения гравитационных аномалий в сочетании с высокой оперативностью. Следует отметить, что полномасштабная реализация метода спутниковой альтиметрии позволила в 1990-е годы выйти на уровень точностных характеристик определения гравитационных аномалий в Мировом океане, в значительной мере исключивших необходимость трудоемкой и дорогостоящей площадной гравиметрической съемки на большей части акватории Мирового океана для целей геодезического обеспечения [14].
В этой связи значительное внимание привлекает вопрос о выяснении реальных возможностей спутниковой альтиметрии в плане точности и разрешающей способности, особенно с учетом взаимной пространственной корреляции альтиметрических данных.
По теоретическим оценкам спектральных плотностей сигнала и шума, разрешающая способность систем спутниковой альтиметрии по длинам волн находится на уровне 30 км, а точность (средняя квадратическая погрешность) определения аномалий силы тяжести составляет 8 мгал. По этим оценкам метод спутниковой альтиметрии в 8-10 раз уступает современным средствам морской гравиметрической съемки. Теоретические оценки не в полной мере соответствуют действительности. Фактически современные данные спутниковой альтиметрии вполне могут рассматриваться в качестве альтернативного источника для картографирования аномалий силы тяжести в масштабе 1: 1 000 000 с сечением 10 мГал [15]. Более того, комплексирование данных, полученных различными системами спутниковой альтиметрии, потенциально позволяет обеспечить определение аномалий силы тяжести со средней квадратической погрешностью около 5 мГал с разрешением не хуже 20 км. Наиболее высокая точность восстановления характеристик ГПЗ по данным спутниковой альтиметрии достигается в районах Мирового океана с достаточно большими глубинами. В прибрежных районах, а также в районах повышенной гравиметрической и океанографической аномальности обеспечение требуемой на сегодняшний день точности и в перспективе высокой точности определения параметров ГПЗ по данным спутниковой альтиметрии является проблематичным.
Специфика геодезических задач привела к разделению программ спутниковой альтиметрии по стратегии набора измерительной информации на геодезические и океанографические (изомаршрутные).
В геодезическом решении главным является обеспечение достаточно высокой плотности покрытия акватории Мирового океана альтиметрической информацией по восходящим и нисходящим трассам в расчете на единицу площади. В океанографическом режиме должна обеспечиваться достаточно высокая периодичность получения информации о состоянии морской поверхности на одном и том же участке акватории, что достигается построением системы изомаршрутных (лежащих в полосе порядка 1-2 км) высотомерных трасс. Период повторяемости зависит от параметров орбиты спутника.
Дополнительный интерес к точностным характеристикам спутниковой альтиметрии возник в последние годы в связи с получением ряда новых глобальных моделей ГПЗ по данным межспутниковых измерений в системах CHAMP и GRACE [ ]. Ожидается, что новые спутниковые модели ГПЗ могут быть использованы для повышения точности учета отклонений морской поверхности от геоида. Интерпретация расхождений между высотами геоида, полученными по данным слежения «спутник-спутник» и альтиметрическим высотам геоида требует дальнейших исследований.
В таблице 2 приведены средние квадратические ошибки определения характеристик ГПЗ в Мировом океане по данным спутниковой альтиметрии.
Таблица 2 - Средние квадратические ошибки определения характеристик ГПЗ в Мировом океане по данным спутниковой альтиметрии
Характеристики ГПЗ | Спутники | |
ГЕО-ИК | GEOSAT | |
Высота геоида (м) | 1,0 | 0,3-0,5 |
Уклонение отвесной линии (сек) | 1,5- 3 | 1 – 2 |
Аномалии силы тяжести (мГал) | 8-15 | 6-10 |
Спутник ГЕО-ИК эксплуатировался только в геодезическом режиме, в проектах GEOSAT был использован комбинированный (геодезический и океанографический) режим набора информации.
Реализованные за рубежом новые проекты в области спутниковой альтиметрии позволили повысить точность и детальность определения характеристик ГПЗ. В результате точность определения уклонений отвесных линий на большей части Мирового океана составила 0,5²- 1,0², что позволило существенно продвинуть решение одной из стратегических задач Министерства обороны США в области создания глобальной цифровой модели уклонений отвесных линий со средней квадратической ошибкой 0,5 ² для системы автономной навигации ВВС и ВМС США.
Метод спутниковой альтиметрии базируется на радилокационных измерениях высоты искусственного спутника Земли над морской поверхностью. Для этого на его борту устанавливается радиовысотомер, который осуществляет радиолокационное зондирование земной поверхности по нормали. Отраженный сигнал принимается на борту спутника. Высота спутника над морской поверхностью определяется на основе соотношения:
h= 1/2 c Dt, (29)
где с – скорость света;
Dt – задержка времени приема отраженного сигнала.
Принципиальна схема получения исходной информации о гравитационном поле Земли по измеренным высотам спутника над морской поверхностью приведена на рисунке 3.
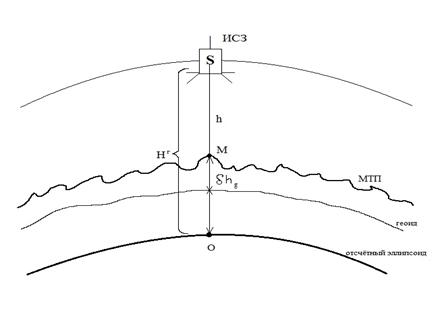
Рис. 3 – Принципиальна схема получения исходной информации о гравитационном поле Земли по измеренным высотам спутника над морской поверхностью
С позиции изучения гравитационного поля Земли математическая модель метода спутниковой альтиметрии принимает вид:
ζ= H - h - dhg - (dhT + dhA + dhB + dhH) , (30 )
где z – высота геоида над отсчетным эллипсоидом;
Н – геодезическая высота спутника над отсчетным эллипсоидом;
h – измеренная альтиметром высота ИСЗ над морем, определяется по формуле (?);
dhg – отклонение МТП от геоида;
dhT – приливная поправка;
dhA – влияние атмосферной рефракции;
dhB – изменение МТП, обусловленное атмосферным давлением;
dhH – влияние инструментальной погрешности.
Точность определения высот геоида обусловлена следующими погрешностями[17]:
– определения орбитального положения спутника;
– учета влияния внешней среды на прохождение сигнала;
– учета отклонения МТП от геоида в моменты измерений.
В работе [18] отмечено, что основным источником погрешности определения орбит спутника являются ошибки в траекторных измерениях, ошибки модели движения спутника и ошибки координат пунктов наблюдений.
Ошибки определения радиус-векторов спутника обусловлены географическим положением точки наблюдения на МТП и погрешностей определения параметров модели Земли.
Основные пути уменьшения этой погрешности состоят в повышении точности траекторных измерений и координат пунктов наблюдений, в уточнении модели геопотенциала, и уравнивание высотомерных трасс за условие равенства высот геоида в точках пересечения восходящих и нисходящих прохождений.
Благодаря лазерным дальномерам, системам траекторного слежения типа DORIS и аппаратуре спутниковой навигации GPS и ГЛОНАСС, а также появлению новых глобальных моделей геопотенциала типа JGM3 точность орбитальной привязки альтиметрической информации достигла уровня, обеспечивающего определение радиус-вектора спутника с погрешностью сантиметров[18].
Погрешность аппаратуры ИСЗ обусловлена нестабильностью бортового напряжения, температурного режима, дискретностью отсчетов и т. д. основной путь уменьшения этой погрешности, кроме улучшения технических характеристик приборов, – это обработка информации в точках пересечения и на повторных высотомерных трассах.
Ошибки определения альтиметрических высот геоида из-за влияния внешней среды (в основном метеорологических и океанографических факторов) зависят:
1) от погрешности, обусловленной задержками прохождения радиосигнала в тропосфере и ионосфере (атмосферная рефракция);
2) от ошибки, обусловленной состоянием отражающей способности морской поверхности и формой отраженного сигнала;
3) от ошибки, обусловленной рассеиванием радиоимпульса.
Погрешности альтиметрических высот геоида, обусловленные атмосферной рефракцией составляют [17]:
– для сухой составляющей тропосферной рефракции 2-3 м;
– для влажной составляющей тропосферной рефракции 0,05-0,7 м;
– для ионосферной рефракции 0,01-0,2 м.
Для обеспечения необходимой точности учета атмосферной рефракции необходимо иметь цифровые карты температуры, давления, влажности воздуха у поверхности воды и состояния ионосферы с периодом 6 часов [18].
Ошибка альтиметрической высоты геоида, обусловленная электромагнитным смещением, вызвана несовпадением среднего уровня моря со средней отражающей поверхностью. Влияние этой погрешности не превышает 5 см[18].
Погрешность высот геоида x, обусловленная барическим влиянием атмосферы на высоту МТП, как отмечено в работе [?], может достигать нескольких метров.
В таблице 3 приведены отклонения МТП от геоида dhg, обусловленные различными метеорологическими и океанографическими факторами [18].
Таблица 3 – Метеорологические и океанографические факторы и их влияние на амплитуды и наклоны морской поверхности
Фактор | Период | Длина волны (км) | Амплитуда волны (см) | Наклонение морской поверхности (углов. сек) |
Ветровые волны | 2 – 30s | 0,001– 0,3 | 10 – 4500 | – |
Зыбь | 10 – 200s | 0,1 – 10 | 100 – 500 | – |
Цунами | 10 – 50m | 200 – 500 | 100 – 150 | 1,3 |
Сейши | 1 – 10h | 200 – 1000 | 50 – 80 | 0,3 |
Приливы | 0, 5d | 1000 – 5000 | 3 – 30 | 0,05 |
1d | 2000 – 5000 | 3 – 30 | 0,05 | |
Ветровые нагоны | 1 – 5d | 100 – 300 | 100 – 200 | 2,0 |
Линзы | 2 – 20d | 200 | 100 | 2,0 |
Баростатические колебания | 2 – 10 d | 1000 – 5000 | 70 – 80 | 0,1 |
Синоптические колебания | 20 – 60 d | 100 – 400 | 50 – 120 | 1,3 |
Колебания квазистационарной МТП | 1g | 400 – 800 | 100 – 200 | 0,3 |
Среди приведенных в таблице 3 факторов наиболее проблематичным является учет отклонений МТП под действием ветровых нагонов, линз, баростатических и синоптических колебаний. Погрешности определения высот геоида ζ из спутниковых альтиметрических наблюдений, обусловленных этими факторами, могут быть учтены путем математического моделирования метеоданных.
Проблема ослабления погрешностей учета колебаний МТП решается с использованием альтиметрических профилей геоида по повторяющимся профилям на достаточно продолжительном интервале времени (порядка года) и с использованием информации в точках пересечения трасс [19]. Другой путь решения этой проблемы состоит в уточнении модели квазистационарной МТП и определении параметров динамической топографии океана, одновременно с уточнением координат станций и параметров модели ГПЗ динамическим методом [20].
Однако, координальным образом проблема может быть решена путем совместного использования данных спутниковой альтиметрии и низкоорбитальной спутниковой градиентометрии [17].
Обработка спутниковой альтиметрической информации включает:
– уточнение начальных условий орбитальных дуг и определение точных координат центра масс спутника на моменты измерений;
– контроль, анализ, введение корректирующих поправок, низкочастотную фильтрацию, оценку точности и отбраковку измерений.
Вычисление высот геоида ζ по трассам включает построение опорного каркаса высотомерных трасс, уравнивание измеренных профилей геоида за условия совпадения в точках пересечения трасс, вычисление уравненных высот геоида и их градиентов (уклонений отвесных линий) вдоль трасс в подспутниковых точках.
Цифровые модели высот геоида ζ, уклонений отвесных линий x и h и аномалий силы тяжести Dg получают путем интерполяции высот геоида и их градиентов из подспутниковых точек в узлы равномерной географической сетки, образованной меридианами и параллелями, с шагом по широте и долготе 1 – 5 ¢[18].
Преобразование альтиметрических высот геоида ζ в значения составляющих уклонения отвесных линий x и h и аномалий силы тяжести Dg основано на соотношениях[21]:
 (31 )
(31 )
 (32)
(32)
где z0 – высота геоида в определенной точке;
R – средний радиус Земли;
g – нормальное значение силы тяжести;
r – расстояние между текущей и определяемой точками.
Для вычисления по формулам (б) могут быть использованы методы численного дифференцирования в некоторой малой окрестности определяемой точки. В основе метода численного дифференцирования для равномерной сетки лежит аппроксимация функции, от которой берется производная, обычно это первый интерполяционный многочлен Ньютона [22]. Размер окрестности определяемой точки зависит от точности и детальности исходных данных, сложности гравитационного поля и наличия априорной информации.
Для вычисления аномалий силы тяжести Dg по формуле (в) высоты геоида x необходимо знать по всей Земле. Но ядро интеграла в формуле (в) быстро убывает с удалением от определяемой точки, то интегрирование выполняют только в ближайшей зоне, радиус которой также зависит от сложности гравитационного поля, а также от детальности и точности используемой модели гравитационного поля Земли. Дальние зоны учитывают с использованием планетарной модели гравитационного поля Земли в виде ряда Фурье по системе сферических функций.
В работе [22] предлагается альтернативный вариант вычисления аномалий силы тяжести Dg по альтиметрическим уклонениям отвесной линии по формуле:
 , (33)
, (33)
где y – сферическое расстояние между текущей и определяемой точками;
Н(y) – ядро преобразования, определяемое выражением [22]:
 . (34)
. (34)
Преобразование альтиметрических высот геоида x в аномалии силы тяжести с использованием формулы (в) было выполнено в 1985 г.[23] по данным альтиметрических спутников Geos-3 и Seasat. В результате был создан каталог альтиметрических аномалий силы тяжести с детальностью 15¢х15¢.
Аналогичная задача была решена в 1993 г.[20] по данным российских спутников ГЕО-ИК.
Кроме формул (в) и (г) для преобразования высот геоида в аномалии силы тяжести при обработке спутниковой альтиметрии применялись методы статистической коллокации по формуле [25]:
![]() , (35)
, (35)
где z0 и Dg0 – значения высоты геоида и аномалии силы тяжести, вычисленные с помощью планетарной модели гравитационного поля Земли;
Сzz – автоковариационная матрица высоты геоида;
СzDg – взаимная ковариационная матрица аномалий высоты и аномалий силы тяжести;
D – ковариационная матрица погрешностей.
Для повышения эффективности процедур пересчета альтиметрических высот геоида в значения аномалий силы тяжести и составляющих уклонений отвесной линии в работе [21, 26] был применен спектральный метод. Основанный на частотной фильтрации с использованием быстрого преобразования Фурье в виде:
 , (36)
, (36)
![]() , (37)
, (37)  , (38)
, (38)
где F-1 и F – операторы прямого и обратного двумерного преобразования Фурье;
wx и wy – частоты колебаний гравитационного поля по оси x и y;
i – мнимая единица.
С использованием описанных методов обработки спутниковой альтиметрической информации за период с 1990 – 2005 гг. получен ряд цифровых моделей аномального гравитационного поля в Мировом океане с детальностью от 15¢х15¢ до 1¢-2¢ [18].
Точность почти всех моделей альтиметрических аномалий силы тяжести оценивалась по результатам сравнения с данными морских гравиметрических съемок в контрольных районах. Результаты сравнительных исследований показали, что все модели близки к точностным характеристикам. Расхождения с гравиметрическими данными оцениваются средними квадратическими ошибками:
– в слабо аномальных районах (50% поверхности Мирового океана) – 3-5 мГал;
– в средне аномальных районах (40% поверхности Мирового океана) – 6-9 мГал;
– в сильно аномальных районах (10% поверхности Мирового океана) – 10-15 мГал [18].
Объем спутниковой альтиметрической информации, имеющейся в различных Международных центрах данных, в настоящее время превышает 500 Гб и постоянно увеличивается. Все это создает определенные проблемы в плане использования спутниковой альтимертической информации в научных исследованиях. Особое значение приобретает обеспечение возможности удаленного доступа к спутниковой альтиметрической информации.
В настоящее время режим удаленного доступа реализован для следующих видов информации:
– точные значения высот геоида, аномалии силы тяжести, уклонений отвесных линий, вычисленные по глобальным моделям гравитационного поля Земли до 360 степени сферических гармоник (EGM-96, ГАО-98 с детальностью 15¢х15¢;
– средние значения аномалий силы тяжести по трапециям 30¢х30¢, вычисленные по моделям 360 степени сферических гармоник EGM-96, ГАО-98;
– топографические высоты квазигеоида территорию Европы ( по данным EGG-97 10¢х15¢) и на территорию России ( по данным ГЦ РАН и 29 НИИ МО РФ, 5¢х5¢);
– альтиметрические аномалии силы тяжести по данным NO FF, NASA/GSFC (США), Тайваньского университета, KMS (Дания) с детальностью 1¢х1¢и 2¢х2¢;
– аномалии высоты уровня с детальностью 10х10 по альтиметрическим данным спутников TOPEX/POSEIDON, ERS-1, GEOSAT;
– средние динамические высоты морской поверхности 10х10 по данным климатических моделей Национального географического центра США;
– временные ряды альтиметрических высот морской поверхности (в графическом виде) для точек Черного, Балтийского, Охотского, Каспийского, Белого и Баренцева морей [18].
2.2 Спутниковая градиентометрия
2.2.1. Дифференциальная геометрия гравитационного поля
Под дифференциальной геометрией гравитационного поля понимается
Дифференциальная геометрия гравитационного поля имеет целью описание геометрии эквипотенциальных поверхностей, cиловых и отвесных линий в гравитационном поле Земли и других планет. С этой проблемой тесно связано изучение формы уровенной поверхности потенциала силы тяжести в локальных областях. Именно этот случай важен для инженерной геодезии. В структуру дифференциальной геометрии гравитационного поля Земли входит преобразование между геометрическим и гравитационным пространствами, составление карт квазигеоида и теллуроида, аспекты анализа деформаций в условиях напряжений и анализ напряжений в геометрическом и гравитационном пространствах[27]. Дифференциальный метод изучения гравитационного поля Земли известен давно и заключается в измерении по маршруту первых или вторых производных потенциала силы тяжести, после интегрирования которых получают разность первых производных или самого потенциала[В. Бровар].
Первые производные потенциала силы тяжести W(x, y, z):
![]() , (39)
, (39)
где gz – сила тяжести;
gx и gy – составляющие силы тяжести по осям x и y.
Производные gx и gy измерять трудно, только gz можно измерить достаточно точно и быстро[ В. Бровар].
Потенциал W как функция трех независимых переменных (х, у,z) имеет шесть вторых производных:
1)  (40)
(40)
2) ![]() (41)
(41)
3) ![]() . (42)
. (42)
Вторые производные Wxx Wxy Wyy определяют форму уровенной поверхности в данной точке; вторые производные Wxz Wyz – горизонтальные градиенты силы тяжести g в направлениях x и y; вторая производная Wzz –вертикальный градиент силы тяжести g.
Вторые производные в формулах (40) и (42) называются также вариациями силы тяжести по соответствующим координатам и доступны непосредственному измерению [28]. Для измерения вторых производных потенциала силы тяжести применяется прибор![]() гравитационный вариометр (крутильные весы), изобретенный в 1896 г. венгерским физиком Р. Этвешем.
гравитационный вариометр (крутильные весы), изобретенный в 1896 г. венгерским физиком Р. Этвешем.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
