


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Этот прибор сложный в обращении и позволяет определить только четыре элемента: Wxz , Wyz , Wxy , DW = Wyy - Wxx .
Гравитационный вариометр обладает большой чувствительностью и особенно отзывается на притяжение близко расположенных масс. Устройство и принцип измерения
В гравитационном вариометре измеряют смещения двух или более числа пробных масс в неоднородном поле измерительной системы, полагая при этом, что градиент постоянен [торге]. В качестве системы отсчета принимают топоцентрическую систему координат, связанную с направлением отвесной линии g (рисунок 4). Современные гравитационные вариометры применяют преимущественно для очень детальных исследований поля силы тяжести малых участков, например для обнаружения подземных помещений на историко-архитектурных территориях. В последние десятилетия в разных странах пытаются создать вариометр для измерений на подвижном носителе (корабль, самолет, искусственный спутник Земли), что является трудной задачей.
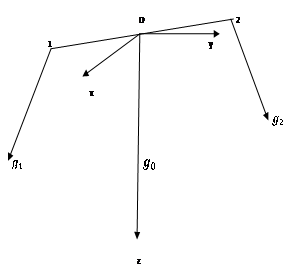
Рис.4 - Принципиальная схема гравитационного вариометра.
Может другую схему
Разность ускорений g1 и g2 , которые действуют на близкие пробные массы получается по измерениям разности их перемещений, или углов поворота. Поскольку первые производные потенциала W – это ускорения, то их размерность в системе СИ будет м×с-2. Следовательно, вторые производные потенциала W имеют размерность с-1. Величину, равную 10-9×с-1 принято называть этвешом (Э) по имени Р. Этвеша [загребин].
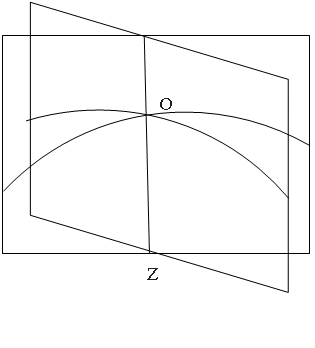
Из дифференциальной геометрии известно, что в заданной точке О на уровенной поверхности потенциала силы тяжести (рисунок 4) кривизна нормального сечения, плоскость которого составляет с плоскостью XOY угол φ, имеет следующий вид:
![]()
 . (43)
. (43)
При условии, если уравнение поверхности задано в виде:
z=z(х, у).
Уравнение уровенной поверхности дано в виде равенства:
W(x, y, z)=const , (44)
то равенство (43) преобразуются к следующему виду:
![]()
 . (45)
. (45)
 |
![]()
φ
ww
W
 Рис. 4 – Cечение уровенной поверхности W(x,y,z) плоскостями.
Рис. 4 – Cечение уровенной поверхности W(x,y,z) плоскостями.
Из равенства (45) можно получить кривизны для сечений, совпадающих с
координатными плоскостями хz и уz, если ![]() или
или ![]() . Для первого сечения имеем:
. Для первого сечения имеем:
 , (46)
, (46)
для второго –
 . (47)
. (47)
Вторые производные групп Wxz , Wyz и Wzz можно представить в следующем виде:
![]()
 . (48)
. (48)
Эти производные позволяют по значению силы тяжести g1 в точке (x1y1z1) найти значение силы тяжести g2 в другой точке (x2y2z2) при помощи формулы [29]:
 . (49)
. (49)
Если интегрирование выполняют между точками с координатами x1y1 и x2y2 , то можно использовать следующую формулу:
. (50)
Cоставляющие уклонения отвеса в плоскости меридиана и первого вертикала получают по формулам [огор]:
![]() , (51)
, (51)
. (52)
Вторые производные потенциала силы тяжести можно использовать для определения разности составляющих уклонения отвесных линий и высот квазигеоида между двумя близко расположенными точками А и В по формулам:
 , (53)
, (53)
 . (54)
. (54)
Производные ![]() и
и ![]() из измерений гравитационным вариометром раздельно не определяют. Из измерений определяют разность по формуле [огор]:
из измерений гравитационным вариометром раздельно не определяют. Из измерений определяют разность по формуле [огор]:
 (55)
(55)
Приращение высоты квазигеода между двумя пунктами А и В можно определить по следующей формуле:
![]() , (56)
, (56)
где ![]() ;
;
![]() ;
;
![]() - разность нормальных высот;
- разность нормальных высот;
gm - среднее значение нормальной силы тяжести на линии АВ.
Ряд технологических достижений в области космических исследований в семидесятые годы прошлого столетия позволил разработать спутниковые методы определения гравитационного поля Земли с высоким разрешением.
Чтобы преодолеть ограничения, связанные с наземными наблюдениями спутников, представляющими традиционные методы, должны выполняться три фундаментальных критерия:
- высота орбиты как можно ниже (200-500 км),
- непрерывный охват трехмерными наблюдениями больших орбитальных дуг, и
- разделение гравитационных и негравитационных сил, действующих на спутник.
С такими соображениями реализуются две концепции, которые уже проверены (см. также Rummel et al., 2002). Это:
- наблюдения спутник-спутник (измерения расстояний и скорости изменения расстояний между спутниками), и
- спутниковая градиентометрия (измерение разности ускорений силы тяжести внутри спутника.
2.2.3 Система спутник-спутник
Технология спутник-спутник (satellite to-satellite, SST) состоит в измерении расстояний и скорости изменения расстояний между спутниками. При этом предусматривается два варианта взаимного расположения спутников: высокий спутник и низкий спутник (НL) и два спутника, расположенных на близких орбитах (LL) на расстоянии 50−300 км.
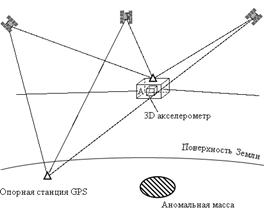
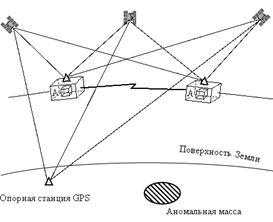
Рис. 10.2 Разные концепции, посвященные гравитационным полевым миссиям: SST-HL, SST-LL, SGG по [Rummel et al., 2002]
[http://perso. wanadoo. fr/eurospace/espdatabase/index. html]
В системе спутник – спутник в режиме высокий-низкий, околоземная орбита низколетящего спутника (НОО) непрерывно отслеживается спутниками, снабженными глобальными системами местоопределения типа GPS/ГЛОНАСС или Galileo. Термин «режим высокий-низкий» не совсем соответствует действительности, так как спутники GPS/ГЛОНАСС и Galileo находятся на средней околоземной орбите (СОО), а не на высокой околоземной орбите (ВОО). Кроме отслеживания спутник – спутник, на спутнике НОО устанавливают акселерометр. Негравитационные силы, действующие на низкий спутник, измеряются акселерометрами. Спутник LEO является зондом в гравитационном поле Земли, который можно точно и непрерывно наблюдать. Наблюдаемые 3-D ускорения соответствуют гравитационным ускорениям. Тем самым измеряются трехмерные возмущающие ускорения, вызванные гравитационным полем Земли. Эти ускорения соответствуют первым производным гравитационного потенциала W. Поле силы тяжести выводится путем обращения полученной информации относительно орбиты низкого спутника.
Система спутник – спутник в режиме высокий-низкий впервые был применен в программе Аполлон полета на Луну для контроля с Земли лунного модуля. Последующий анализ этих данных обнаружил сильные аномалии в гравитационном поле Луны (масконы).
На Земле начало метода – 1975 г. Стационар ATS-6 и низкие GEOS-3, NIMBUS-6 и «Аполлон-Союз».
Из сравнения скорости изменения измеренного значения радиальной скорости и, вычисленной по модели GEM-7, можно четко увидеть тонкую гравитационную структуру.
Система спутник-спутник SST-HL, из которых один высокий, другой низкий, реализована в проекте CHAMP (Challenging Mini-Satellite Payload for Geophysical and Application). Реализация данного проекта возложена на Научно-исследовательский центр Потсдама (GeoForchungZentrum Potsdam (Германия).
Спутник CHAMP запущен 15 июля 2000 г. с космодрома Плисецк (Росси). Спутник массой 522 кг и длиной 8,33 м, период обращения – 93.61 мин. Наклонение 87.3°, высота в начале 450 км, в конце 300 км. Срок эксперимента 5 лет. Масса 500 кг.
Оборудование: 16-канальный GPS приемник с много-антенной системой, 3-осный акселерометр, лазерные отражатели для локации с Земли, магнетометр, цифровой счетчик дрейфа ионов.
Предусматривает следующие цели:
- изучение глобального поля силы тяжести, или, конкретнее, уточнение длинноволновой части статического поля и ее временных вариаций (вызванных, например, перераспределениями атмосферных масс, океанической циркуляцией, изменением уровня моря за счет таяния полярного льда);
- изучение глобального магнитного поля, или, конкретное, уточнение основного магнитного поля и магнитного поля земной коры и их пространственно - временных вариаций;
- профилирование ионосферы и тропосферы, или, более определенно, уточнение атмосферы с точки зрения ее температуры, содержания водяных паров и электронной структуры по данным о преломлении сигналов GPS.
В системе спутник - спутник в режиме низкий - низкий два спутника двигаются по одной и той же орбите друг за другом, но отделены несколькими сотнями километров (около 220 км). Расстояния между ними и скорости изменения этих расстояний измеряются с предельно возможной точностью (до 10 микрон!). Орбита каждого спутника подвержена индивидуальному влиянию возмущающих ускорений, которые соответствуют первым производным гравитационного потенциала. Информация от обоих спутников дает разности ускорений. Кроме того, положения спутников НОО определяются другими спутниками c GPS на борту (рис.7). Так что режим высокий – низкий также, по существу, имеет место. Эффект действия на спутник негравитационных сил, например, за счет аэродинамического сопротивления, должен быть компенсирован, или измерен акселерометром. Спутники собирают информацию, выполняя тщательно выверенные маневры на орбите. В то время как один покачивается и медленно перемещается в неровном гравитационном поле земли, второй, следующий на расстоянии 220 километров, измеряет колебания в разделяющем их расстоянии вплоть до микрона. Именно изменения расстояния и описывают природу и масштабы гравитационных аномалий, над которыми пролетают спутники.
Методика LL впервые была испытана во время стыковки «Аполлон-Союз» в 1975 г.
Система спутник-спутник SST-LL, в которой оба спутника низкие, реализована в проекте GRACE (Gravity Recovery and Climate Experiment) Проект GRACE – совместный проект Американского национального управления по аэронавтике и космонавтике (NASA) и Немецким центром авиационных и космических полетов (Deutsches Zentrum fur Luft - und Raumfahrt, DLR).
Основными целями проекта являются:
– определение глобального гравитационного поля Земли с высокой разрешающей способностью;
– изучение вариации силы тяжести во времени;
– изучение с помощью GPS - измерений явлений преломления в ионосфере и тропосфере путем детального определения электронного содержания.
Запущены 17 марта 2002 г. с космодрома Плисецк (Россия). Деятельность миссии GRACE основана на работе двух абсолютно идентичных спутников, которым дали имена «Том» и «Джерри», летящие один за другим, находящихся на расстоянии 220 километров друг от друга, на полярной орбите высотой около 500 километров над Землей. При пролете над гравитационными аномалиями это расстояние изменяется, поскольку спутники сильнее или слабее притягиваются Землей. Например, если летящий впереди спутник находится над районом с более высокой гравитацией, то его «притянет» к Земле немного сильнее, чем другой аппарат. И вот это расстояние, которое отражает изменение в силе притяжения над данным участком земной поверхности, может быть измерено. На спутниках установлены микроволновые дальномеры с точностью измерений вплоть до одного микрометра. Именно высокая точность измерения расстояния между спутниками позволяет улавливать малейшие изменения в силе притяжения [http://www. csr. utexas. edu/grace/, http://www. eurekalert. org/ pub_releases/2007-12/haog-gta121207.php].
Оборудование: высокостабильный генератор частоты, обслуживающий дальномерную систему KBR, GPS приемник, цифровая звездная камера, уголковые отражатели для лазерной локации с Земли.
Первоначально ожидалось, что CHAMP проработает от четырех до пяти лет, но благодаря своей устойчивой конструкции даже при низкой траектории полета, миссия просуществовала в два раза дольше. Он был использован для измерения гравиметрического поля Земли, магнитного поля Земли и для оптического зондирования атмосферы. Используя данные трехмесячных наблюдений спутника СHAMP, данные GPS-технологий, прецизионного трехосного акселерометра (разрешение ![]() с частотами
с частотами  и возмущения орбит спутников была получена модель орбитального гравитационного поля ЕIGEN−IS ,без использования данных наземной гравиметрии и спутниковой альтиметрии [Reigber, 2002; Дубовской, 2010]. Преимуществом проекта EIGEN-IS является практически полное покрытие земной поверхности благодаря полярной орбите (склонение 87,30), одновременное отслеживание прецизионного акселерометра и небольшой высоты почти круговой орбиты (начальная высота 454 км с уменьшением её до 1,5 км/месс) ) [Дубовской, 2010].
и возмущения орбит спутников была получена модель орбитального гравитационного поля ЕIGEN−IS ,без использования данных наземной гравиметрии и спутниковой альтиметрии [Reigber, 2002; Дубовской, 2010]. Преимуществом проекта EIGEN-IS является практически полное покрытие земной поверхности благодаря полярной орбите (склонение 87,30), одновременное отслеживание прецизионного акселерометра и небольшой высоты почти круговой орбиты (начальная высота 454 км с уменьшением её до 1,5 км/месс) ) [Дубовской, 2010].
Для обеих концепций КА на низких орбитах являются сенсорами гравитационного поля Земли. Для измерения относительных скоростей могут использоваться однопутные и двухпутные микроволновые межспутниковые системы. Нерегулярные изменения этой скорости содержат гравитационную информацию. Чем ниже орбита спутника, тем более отчетливой и детальной становится информация.
В результаты работы GRACE была составлена карта гравитационного поля Земли. Эта карта в 100–1000 раз точнее ныне используемых. – первый продукт проекта, в котором участвуют два спутника, находящихся в 450 км от Земли [http://www. eurekalert. org/pub_releases/2007-12/haog-gta121207.php.]
Переливы цветов показывают еле уловимые изменения гравитационного поля Земли. Если бы пришлось пролетать над красными зонам, вас бы тянуло вниз чуть сильнее, а голубым обозначены области, где притяжение планеты слегка ослабевает. Гравитационные аномалии не воспринимаются человеческими органами чувств, поэтому ученые нанесли эти данные на сферу, преувеличив пики и провалы. Так была получена удивительно четкая иллюстрация предмета исследования, которая позволят получить новые сведения о том, как океаны движутся и влияют на климат. Само понимание того, как парниковые газы могут изменить планету, будет зависеть от этих пиков и впадин. Очевидные пики гравитации были известны уже ранее - например, Гималаи, где масса продолжает накапливаться вместе с гравитационным притяжением, в то время как порода собирается в этой области в результате перемещения тектонических плит Земли [*****@***jpl. nasa. gov].
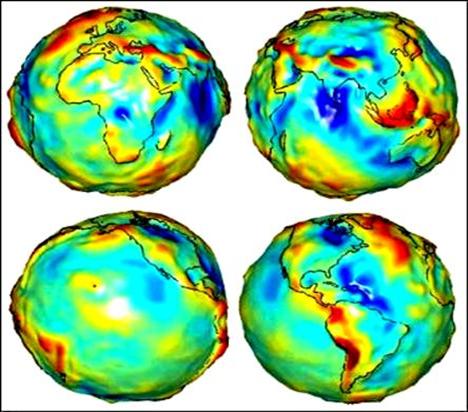
Рис.8 – Карта гравитационного поля Земли по данным спутников GRACE.
Анализируя результаты, полученные по наблюдениям спутников GRACE, объяснена гравитационная аномалия Канады. Она связана, как считают ученые с конвекцией расплавленного материала в мантии Земли, приводящей к смещению тектонических плит. Поскольку аппаратура спутников GRACE не обладает достаточной чувствительностью, чтобы напрямую измерить передвижения коры, учёные убрали эффект от воздействия ледника из общей гравитационной картины региона и рассматривали только вклад в это явление от конвекции в мантии. В результате было установлено, что даже после того, как земная кора окончательно поднимется, гравитация в регионе всё равно будет пониженной из-за конвективного движения в мантии. Используя этот набор данных, исследователи также обнаружили, что на каждой стороне Гудзонова пролива присутствует два ледяных купола, воздействием которых на гравитационное поле ранее пренебрегали.
2.2.3. Спутниковая градиентометрия
Для реализации спутникового градиентометра были разработаны градиентометры различного типа: комбинации акселерометров, криогенные градиентометры, градиентометры ротационного типа. Основные разработки спутниковых градиентометров проводились в США и Европе. [].
Спутниковая градиентометрическая аппаратура не связана с Землей и, поэтому измеряет одну или несколько компонент тензора вторых производных потенциала силы притяжения V(x,y,z) в осях (x,y,z), связанных со спутником (55):
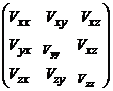 . (57)
. (57)
Если полный тензор измерен на орбите, то гравитационное ускорение ![]() в точке Р получается путем интегрирования по пути PP0:
в точке Р получается путем интегрирования по пути PP0:
 , (58)
, (58)
где ![]() – ускорение в начальной точке P0 в момент t0. Для вычисления
– ускорение в начальной точке P0 в момент t0. Для вычисления ![]() , необходимо знать путь r = r(t). Высокие требования к точности градиентометрических измерений распространяются и на точность определение координат спутника. В работе [Rummel R., Colombo O. L. 1985.] предложены итерационные методы для одновременного определения орбит спутников их координат и компонентов грвитационного тензора (57) Связанная со спутником приборная топоцентрическая система координат движется относительно системы координат, фиксированной в пространстве, при этом неизбежны повороты и ускорения приборной топоцентрической системы координат [Moritz, 1969]. Связь ускорения в инерциальной (i) и топоцентрической (l) системах координат имеет вид [ 1999]:
, необходимо знать путь r = r(t). Высокие требования к точности градиентометрических измерений распространяются и на точность определение координат спутника. В работе [Rummel R., Colombo O. L. 1985.] предложены итерационные методы для одновременного определения орбит спутников их координат и компонентов грвитационного тензора (57) Связанная со спутником приборная топоцентрическая система координат движется относительно системы координат, фиксированной в пространстве, при этом неизбежны повороты и ускорения приборной топоцентрической системы координат [Moritz, 1969]. Связь ускорения в инерциальной (i) и топоцентрической (l) системах координат имеет вид [ 1999]:
![]()
![]() , (59)
, (59)
где ![]() – матрица поворота для перехода от топоцентрической к инерциальной системе координат.
– матрица поворота для перехода от топоцентрической к инерциальной системе координат.
Матрица
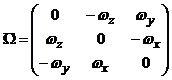 (60)
(60)
содержит составляющие угловой скорости подвижной системы координат;
![]() - вектор линейного ускорения начала координат.
- вектор линейного ускорения начала координат.
Трехмерный вектор удельной силы f (сила, отнесенная к единичной массе) имеет вид [Торге ]:
![]() , (61)
, (61)
где ![]() - равнодействующая гравитационной силы
- равнодействующая гравитационной силы ![]() в центре масс приборной системы и других внешних сил
в центре масс приборной системы и других внешних сил ![]() (в основном торможения спутника в атмосфере и давления солнечного излучения):
(в основном торможения спутника в атмосфере и давления солнечного излучения):
![]() .
.
Если вектор ![]() отнести к центру масс прибора С (рисунок 4), то удельная сила для такой системы (где
отнести к центру масс прибора С (рисунок 4), то удельная сила для такой системы (где ![]() ) определяется по формуле:
) определяется по формуле:
![]() . (62)
. (62)
Тогда разность ускорений f1 и f2 , измеренных парой акселерометров имеет вид:
![]() . (63)
. (63)
Выражение (63) называют основным уравнением градиентометрии на подвижном основании [].
Спутниковые градиентометры должны иметь чувствительность акселерометров порядка 10-3нс-2. Из-за большой величины градиентов и возмущающих ускорений приборы должны иметь значительный динамический диапазон, из-за высокой чувствительности системы к ориентации в пространстве и угловым скоростям погрешность ориентации должна быть не более чем 3∙10-7рад. Тогда влияние перечисленных факторов на результаты измерений градиентов будет не более 10-4нс-2.
С восьмидесятых годов разрабатывались гравитационные градиентометры, которые основаны на традиционных или сверхпроводящих устройствах и устанавливались на спутниках c круговыми полярными орбитами с высотами от 160 до 250 км. Французская программа GRADIO (Национальное бюро по аэродинамическим исследованиям и Исследовательская группа по космической геодезии) сконструировала градиентометр на базе традиционной технологии. В этом приборе имеется несколько микроакселерометров, которые расположены симметрично относительно центра масс по углам многоугольника так, что можно определить полный гравитационный тензор. Трехосные электростатические акселерометры должны иметь разрешение 10-12м∙с-2. При максимальных возмущающих ускорениях около 10-2м∙с-2 (на высоте 200км) прибор должен иметь динамический измерительный диапазон 10 8; для непрерывного контроля и калибровки акселерометров предусмотрена бортовая калибровочная система. Примером сверхпроводящего градиентометра является прибор Пайка, созданный в Университете штата Мэриленд, США. Основными элементами этой не вращающейся системы служат сверхпроводящие акселерометры. Акселерометр содержит пробную массу на мягком подвесе, магнитный преобразователь и усилитель с низкими шумами (сверхпроводящее квантовое интерференционное устройство сквид — SQUID) в состоянии сверхпроводимости. Магнитное поле, создаваемое катушками преобразователя, модулируется при движении пробной массы, в сквиде происходит детектирование и усиление модулирующего сигнала, который затем преобразуется в выходное электрическое напряжение.
Сверхпроводящая схема позволяет непосредственно суммировать и вычитать сигналы акселерометров. Это в свою очередь дает возможность измерять компоненты тензора градиентов силы тяжести, а также линейные и угловые ускорения носителя, необходимые для вычисления поправок. В системах с продольным расположением акселерометров сигналы пропорциональны диагональным элементам Vii тензора и линейным (поступательным) ускорениям. Системы же с перекрестным расположением акселерометров дают недиагональные элементы и угловые (вращательные) ускорения (рис.5). Объединение таких акселерометров в различных конфигурациях позволяет сконструировать градиентометры для определения диагональных элементов тензора или полного тензора вторых производных потенциала силы (55)
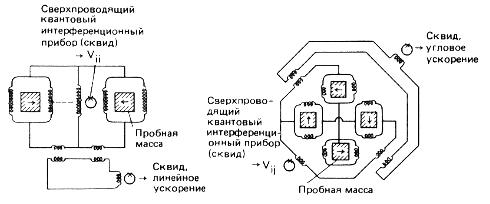
Рис.5 - Принцип сверхпроводящего гравитационного градиентометра с продольным (слева) поперечным (справа ) расположения датчиков.
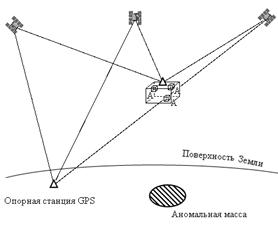
Рис. 10 Спутниковая градиентометрия с трехосным градиентометром
17 марта 2009 года с российского космодрома «Плисецк» стартовала ракета-носитель «Рокот» с европейским спутником GOCE (Gravity Field and Steady-State Ocean Circulation Explorer – «Исследователь гравитационного поля и установившихся океанских течений») на борту. Аппарат GOCE – плод многолетней работы исследователей и инженеров из 45 европейских компаний – предназначен для исследования гравитационного поля Земли. Для этого на спутнике установлен градиометр, который будет измерять гравитационное поле с высочайшей точностью. Точность измерений обеспечивают шесть необычайно чувствительных акселерометров, способных почувствовать отклонение в силе притяжения в одну десятитриллионную от нормального уровня. Помимо градиометра, GOCE оснащен навигационным прибором, принимающим сигналы GPS для точного позиционирования аппарата над поверхностью Земли, а лазерный отражатель позволит с высокой точностью отслеживать движение спутника при помощи наземных лазеров (рис. 10). Управление GOCE осуществляется из Центра управления в немецком городе Дармшадте.
Главное назначение спутника – составление гравитационной карты земли. Знание точной уровенной поверхности океанов и морей (которую на западе принято называть геоидом) важно в исследованиях океанической циркуляции, измерениях динамики уровня моря и движении прибрежных льдов. Все эти явления отражают глобальные изменения климата. Геоид также используется в качестве поверхности отсчета для построения топографических карт. Более точные данные о гравитационных аномалиях позволят лучше понять процессы, происходящие внутри Земли, такие, например, как вулканизм и землетрясения, а также дать новые знания о возвратном движении земной коры в послеледниковый период.
Данные, полученные при наблюдениях, позволяют улучшить существующие модели климата за счет понимания того, каким образом гравитационное поле влияет на циркуляцию океана и изменения уровня моря. GOCE был рассчитан на работу в течение двух лет. Cпутник GOCE, фиксирует отклонения значения ускорения свободного падения в разных точках Земли по отношению к известной величине равной 9,80665 м/c². Идея состоит в следующем. Пара тел (акселерометр) последовательно закреплена на пружинах. При облете планеты одно из них оказывается чуть ближе к ней, и испытывает чуть более сильное притяжение, слегка сильнее натягивая пружинный подвес. Разница между натяжением пружин у обоих тел, как ни мала, может быть измерена и позволяет составить детальную карту гравитационного поля планеты. Точность измерений достигает 1-2 сантиметра по высоте на 100-километровом отрезке орбиты. Для поддержания низкой орбиты спутник оснащен непрерывно работающим ионным двигателем, использующим для создания импульса ионизированные атомы ксенона [http://efield. /140346.html].
Цели проекта GOCE: исследование гравитационного поля и стационарной циркуляции Мирового океана.
- измерить аномалии гравитационного поля с точностью порядка 1мГал (1мГал =м/с2);
- измерить форму земного геоида с точность 1-2 см.
Характеристики GOCE:
Таблица - Характеристики GOCE
Назначение | |
Орбита | Низкая квазикруговая околоземная гелиосинхронная орбита на границе света и тени. |
Наклонение орбиты | 96,7° |
Высота орбиты, км | 255-285,4 |
Эксплуатационный ресурс | ~20 месяцев, включая приемо-сдаточный и калибровочный этап (3 месяца), за которым последуют этапы научных измерений, в продолжительности которых учтено пребывание в дежурном режиме при длительном полете в тени. |
Масса, кг | ~1052 [с учетом массы ксенона (40 кг), используемого в качестве топлива]. |
Целевая аппаратура | - Градиометр, 3 пары трехосевых емкостных датчиков перегрузки с сервоуправлением (в каждой паре датчики разнесены на ~0,5 м); - 12-канальный двухчастотный GPS-приемник геодезического качества; |
Стабилизация | Трехосная. |
Место запуска | Космодром Плесецк |
Владелец и оператор | Европейское космическое агентство. |
Изготовитель ракеты-носителя | Государственный космический научно-производственный центр имени (Москва, РФ). |
По сравнению с режимом низкий-низкий системы спутник-спутник с большим базисом между двумя спутниками НОО, можно сказать, что в случае спутниковой градиентометрии базисное расстояние между двумя акселерометрами стремится к нулю. Это достигается размещением обоих акселерометров на одном и том же спутнике. Таким образом, спутниковая градиентометрия представляет собой измерение разностей ускорения в трех пространственных взаимно ортогональных направлениях шестью акселерометрами (по два на каждой из трех осей), установленными на одном и том же спутнике. Другими словами, измеренный сигнал есть разность гравитационного ускорения спутника, где гравитационный сигнал является результатом притяжения. Главной полезной нагрузкой спутника является электростатический гравитационный градиометр, состоящий из 6 акселерометров и предназначенный для изучения гравитационного поля Земли.
Стрелообразная форма спутника, а также его «плавники», помогают спутнику сохранять ориентацию и уменьшают торможение в верхней атмосфере, которое довольно значительно на высоте его орбиты — около 255 км. Низкая орбита спутника и высокая точность акселерометров в ![]() позволила к окончанию наблюдений улучшить точность определения геоида до 1-2 см при пространственном разрешении полуволны ондуляции геоида порядка 100 км (
позволила к окончанию наблюдений улучшить точность определения геоида до 1-2 см при пространственном разрешении полуволны ондуляции геоида порядка 100 км (![]() ). Для компенсации атмосферного торможения и других негравитационных воздействий на спутнике установлен непрерывно работающий ионный двигатель, использующий для создания импульса ионизированные атомы ксенона
). Для компенсации атмосферного торможения и других негравитационных воздействий на спутнике установлен непрерывно работающий ионный двигатель, использующий для создания импульса ионизированные атомы ксенона
Рис.10 Спутник GOCE постоянно измеряет шесть величин – показания шести акселерометров, из которых тут же будут высчитываться значения ускорения свободного падения и компоненты тензора приливного поля. Форма геоида на картинке сильно преувеличена [http://www. esa. int/esaLP/SEMY0FOZVAG_LPgoce_1.html#subhead2]
.
По итогам двух лет работы на орбите спутника GOCE Европейское космическое агентство выпустило самую полную в мире карту гравитационного поля Земли (рис.11). Собранных данных хватило, чтобы предоставить ученым доступ к самому точному на сегодня геоиду – модели Земли, которая должна помочь разобраться в особенностях земного функционирования – климата, океанских и воздушных течений, движений литосферных плит.
Рис.11 Карта гравитационного поля Земли – yflj e, hfnm

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
