

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
(литература: [1],[3][4])
Тема: Построение концептуальной модели изменения пространственно-временного состояния объекта в трехмерном пространстве. Алгоритмизация. Формализация.
Создание системы контроля состояний объекта делает необходимым формулирование следующих задач:
1) оперативное предоставление объективной информации о состоянии объекта в целом;
2) определение выхода состояния объекта за критический уровень;
3) определение границ структурных частей объекта;
4) прогнозирование будущего состояния объекта.
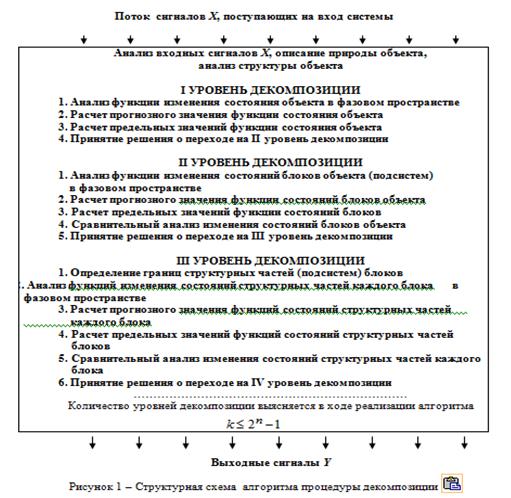
Решение этих задач невозможно без применения методов системного анализа, который дает объективную информацию об изменении всего объекта и его частей. Процедура декомпозиции системы имеет иерархическую структуру, состоящую из k уровней детализации. При этом величина k зависит как от степени сложности самого объекта, так и от вида, скорости движения, влияющего на изменение его состояния, и имеет предельное значение ![]() , где
, где ![]() – количество точек системы. Критерием принятия решения о переходе от уровня к уровню является проверка условий выхода состояния объекта за предельно допустимые границы. При определенных обстоятельствах декомпозиция может осуществляться до уровня неделимого элемента системы – геодезического знака. В этом случае анализ системы контроля переходит к классическому виду.
– количество точек системы. Критерием принятия решения о переходе от уровня к уровню является проверка условий выхода состояния объекта за предельно допустимые границы. При определенных обстоятельствах декомпозиция может осуществляться до уровня неделимого элемента системы – геодезического знака. В этом случае анализ системы контроля переходит к классическому виду.
Следуя структурной схеме (рисунок 1) рассмотрим процедуру декомпозиции на примере модели объекта (рисунок 2).
Пример определение концептуальной модели
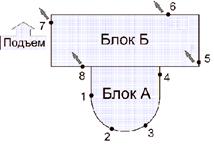
Рисунок 2 – Модель объекта
Во все времена информация имела огромную ценность и представляла собой основу знания человека. В результате взаимодействия объектов между их состояниями устанавливается определенное соответствие, и чем сильнее оно выражено, тем больше информации один объект содержит о другом. Для того, чтобы установить это соответствие, необходима система, которая на основе данных об объекте объективно и правильно отображала бы его состояние. Главной целью этой системы является извлечение информации, а основными задачами являются: сбор данных об объекте, возможность применения методов и средств их обработки, хранение и передача информации. В современной интерпретации речь идет об информационной системе.
Объекты информационных систем характеризуются структурной сложностью, неоднородностью, сопровождающейся большим количеством параметров и характеристик. Это обстоятельство делает необходимым применение иерархических схем моделирования, которые позволяют рассматривать любой объект в виде совокупности блоков ![]() , каждому из которых приводится в соответствие множество его возможных состояний
, каждому из которых приводится в соответствие множество его возможных состояний ![]() где
где ![]() – номер момента времени из периода
– номер момента времени из периода ![]() .
.
В модели для каждого блока ![]() фиксируется момент перехода в новое состояние
фиксируется момент перехода в новое состояние ![]() . В результате, образуется массив состояний, отображающий динамику функционирования модели системы по времени. Блоки модели могут быть представлены отдельными программными модулями. Работа каждого такого модуля воспроизводит работу всех однотипных блоков, а их количество эквивалентно числу блоков.
. В результате, образуется массив состояний, отображающий динамику функционирования модели системы по времени. Блоки модели могут быть представлены отдельными программными модулями. Работа каждого такого модуля воспроизводит работу всех однотипных блоков, а их количество эквивалентно числу блоков.
В основном информационные системы оперируют объектами дискретного типа: дискретные производственные процессы, каналы передачи данных и т. д. В геодезической сфере деятельности к дискретным процессам относится наблюдение за движением системы геодезических знаков во времени и пространстве.
Рассмотрим типовую схему моделирующего алгоритма на примере объекта (рисунок 2) по геодезическим данным.
На рисунке 3 представлена типовая схема моделирующего алгоритма, построенная по блочному принципу. Схема состоит из четырех модулей.
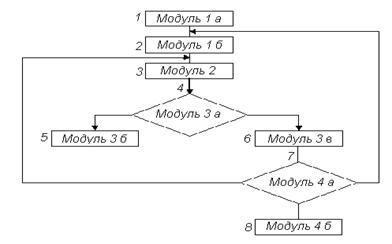
Рисунок 3 – Типовая схема моделирующего алгоритма
Согласно математическому описанию модели изменения состояний объектов по геодезическим данным, содержание программных модулей следующее:
· модуль 1 – формирование начальных значений состояний объекта:
а) начальные значения состояния объекта
 ,
,
где  – координаты геодезических марок
– координаты геодезических марок ![]() приходящихся на нулевую эпоху;
приходящихся на нулевую эпоху;
б) начальные значения состояния объекта для одного прогона модели (указываются отметки марок из множеств ![]() ,
, ,
, учитываемых при анализе состояния объекта для одного прогона (рисунок 3));
учитываемых при анализе состояния объекта для одного прогона (рисунок 3));
· модуль 2 – определение очередного момента изменения состояния объекта, где ![]() и выбор блока
и выбор блока ![]() ;
;
· модуль 3 – логическое переключение:
а) переход по номеру блока ![]() и по времени Т (принятие решения о завершении прогона);
и по времени Т (принятие решения о завершении прогона);
б) фиксирование информации о переходе системы (блока) из состояния в состояние (в графической интерпретации выражается очередной точкой функции, определяющей состояние объекта в фиксированный момент времени с фазовыми координатами M и ![]() , эквивалентными значениям множества отметок геодезических знаков);
, эквивалентными значениям множества отметок геодезических знаков);
в) завершение прогона, если ![]() ;
;
· модуль 4 – управление и обработки информации:
а) проверка точности результатов моделирования (расчет предельно допустимых границ, в рамках которых состояние объекта можно считать устойчивым);
б) окончательная обработка информации и подготовка результатов моделирования к передаче на выход модели системы.
Данная схема моделирующего алгоритма является укрупненной и в разных случаях может быть уточнена и дополнена модулями для варьирования структурой объекта.
Задание.
Построить концептуальную модель изменения пространственно-временного состояния объекта в трехмерном пространстве, используя план геодезических марок наземного объекта (см. лаб. работу №1).
Лабораторная работа №3
(литература: [5],[10],[7])
Тема: Определение пространственно-геометрических характеристик объекта. Построение математической модели пространственно-временного состояния объекта.
Изучение движений и деформаций техногенных объектов является одной из важнейших задач прикладной геодезии. Контролируемыми параметрами (диагностическими признаками) объектов, для которых используются геодезические методы и средства измерений, являются геометрические величины, характеризующие общие перемещения, положение структурных частей объекта в пространстве и между собой, деформации элементов. К ним относятся осадки, горизонтальные смещения, отклонения от вертикали, прогибы и т. д.
Таким образом, движение любого объекта, наблюдаемого геодезическими методами, складывается из поступательного, вращательного движения и деформационных характеристик.
Определим множество геометрических параметров, характеризующих эти виды движения на примере системы геодезических точек, закрепленных на участке земной поверхности S (рисунок 1).
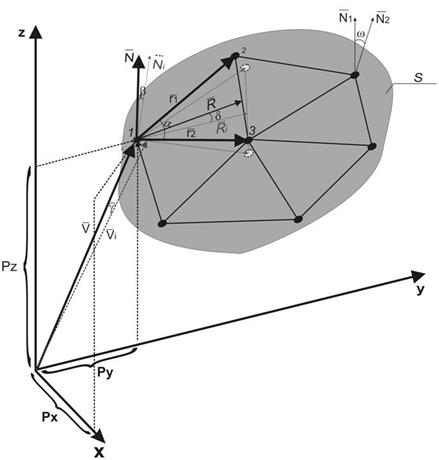
Рисунок 1.
По результатам повторных геодезических измерений регистрируются изменения координат геодезических точек:
 (1)
(1)
где ![]() – номер геодезической контрольной точки.
– номер геодезической контрольной точки.
Множество точек можно представить в виде совокупности треугольных элементов с вершинами в этих точках (принцип построения триангуляционной сети). Координатами вершин являются координаты контрольных точек (1). Каждый треугольный элемент условно будем считать плоским, а его стороны обозначим векторами, имеющими общее начало.
Плоскость, образованная векторами ![]() и
и ![]() (рисунок 1) определяется уравнением
(рисунок 1) определяется уравнением
![]() (2)
(2)
![]() Свободный член
Свободный член ![]() есть расстояние
есть расстояние ![]() от начала координат до плоскости. Разности длин проекций
от начала координат до плоскости. Разности длин проекций ![]() на оси x,y,z
на оси x,y,z
 (3)
(3)
где  (4)
(4)
Параметры  определяют поступательное движение треугольного элемента относительно системы x,y,z.
определяют поступательное движение треугольного элемента относительно системы x,y,z.
Вращательное движение плоскости треугольника характеризуется сочетанием трех составляющих:
- угла поворота ![]() радиус-вектора
радиус-вектора ![]() относительно вертикальной оси OZ ;
относительно вертикальной оси OZ ;
- угла поворота ![]() вектора нормали
вектора нормали ![]() плоского треугольного элемента;
плоского треугольного элемента;
- угла поворота ![]() вектора
вектора  относительно вектора нормали
относительно вектора нормали ![]() .
.
Для выявления деформационных характеристик необходимо учесть такие параметры, которые являлись бы инвариантными относительно системы координат. Например, длину вектора ![]() , угол
, угол  , площадь треугольника
, площадь треугольника ![]() .
.
Все перечисленные параметры являются геометрическими свойствами объекта и характеризуют его состояние (геометрическое положение) в пространстве.
Так как движение тела относительно некоторой системы отсчета XYZ представляет собой совокупность поступательного, вращательного движения и деформации, то изменение состояния объекта во времени и пространстве определится функциями:
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
Нормируя значения аргументов функций (5),(6) и (7) получим пространство состояний (фазовое пространство), где ![]() являются явными функциями координат и времени и представляют собой фазовые траектории, характеризующие изменение состояния объекта (рисунок 2).
являются явными функциями координат и времени и представляют собой фазовые траектории, характеризующие изменение состояния объекта (рисунок 2).
Рисунок 2.
Анализ этих функций дает ответ на вопросы не только о характере и динамике изменения пространственно-временного состояния объекта, но и позволяет выполнить оценку риска в техногенных геодинамических системах по результатам моделирования эволюции их пространственно-временного состояния.
Задание:
1. По данным, рис.1 и таблиц 1,2,3 (лабораторная работа №1) определить пространственно-геометрические характеристики объекта:
А) ![]() ,
,
Б) ![]() ,
,
С) ![]()
2. Построить графики функций (5),(6),(7) рис.2. для каждого треугольного элемента, заданного на точка геодезической системы произвольно сетевой структурой.
Лабораторная работа №4
(литература: [1],[2],[9],[10])
Тема: Разработка модели изменения состояния объекта в фазовом и гильбертовом пространствах.
В качестве формальной модели объекта принята модель динамической системы
 , (1)
, (1)
где ![]() – множество входных сигналов;
– множество входных сигналов;
![]() – множество выходных сигналов;
– множество выходных сигналов;
![]() – пространство состояний системы;
– пространство состояний системы;
![]() – отображение перехода системы из состояния в состояние в результате потока входной информации;
– отображение перехода системы из состояния в состояние в результате потока входной информации;
![]() – отображение выхода системы.
– отображение выхода системы.
Задача структурного анализа объекта сводится к содержательному определению элементов модели (1).
Исходными данными для решения этой задачи, служит массив высотных координат контрольных точек объекта, т. е. состояние объекта в момент ![]() определяется высотными координатами точек. Следовательно, множество
определяется высотными координатами точек. Следовательно, множество ![]() состоит из скалярных функций (2).
состоит из скалярных функций (2).
![]() (2)
(2)
Пространство состояний системы контрольных точек объекта определяется как декартово произведение всех элементов этого множества. Размерность пространства ![]() равна числу контрольных точек.
равна числу контрольных точек.
Каждому циклу наблюдений с номером ![]() в пространстве состояний соответствует точка, радиус-вектор которой
в пространстве состояний соответствует точка, радиус-вектор которой
 , (3)
, (3)
где ![]() – орт-векторы базиса
– орт-векторы базиса ![]() -мерного пространства состояний.
-мерного пространства состояний.
Таким образом, функция ![]() есть отображение, которое множеству входных сигналов
есть отображение, которое множеству входных сигналов ![]() ставит в соответствие фазовую точку (элемент
ставит в соответствие фазовую точку (элемент ![]() ) пространства состояний. Эта точка и представляет состояние объекта в цикле с номером
) пространства состояний. Эта точка и представляет состояние объекта в цикле с номером ![]() . Множество точек, радиус-векторы которых определяются вектор-функцией (3) в каждом цикле наблюдений, образует в фазовом пространстве фазовую траекторию, которая представляет собой явную функцию координат и времени, характеризующую изменение состояния объекта от цикла к циклу.
. Множество точек, радиус-векторы которых определяются вектор-функцией (3) в каждом цикле наблюдений, образует в фазовом пространстве фазовую траекторию, которая представляет собой явную функцию координат и времени, характеризующую изменение состояния объекта от цикла к циклу.
Однако, для адекватной оценки состояния объекта в пространстве и времени, кроме высотных координат контрольных точек объекта, необходимо учитывать и плановые координаты x, y.
Имея для каждой контрольной точки массив данных на множество циклов измерений, анализ изменения положения объекта относительно системы координат сводится к анализу вектор-функции:
 . (4)
. (4)
Таким образом, анализируя вектор-функцию (4) для каждой контрольной точки, делают выводы о закономерностях изменения положения объекта.
Множество X={x,y,z,…} называется метрическим пространством X, если на совокупности упорядоченных пар (x,y) элементов этого множества определена неотрицательная функция ρ(x,y), называемая расстоянием (или метрикой).
Элементы метрического пространства называются точками.
Для множества всевозможных последовательностей x={xn} действительных чисел:
 . (5)
. (5)
Каждая такая последовательность называется точкой пространства, а числа xn, n=1,2,…, - ее координатами. Расстояние между двумя точками x={xn} и y={yn} определяется по формуле:
 . (6)
. (6)
При любом натуральном m в пространстве Rm для точек (x1,…,xm), (y1,…,ym), (z1,…,zm), справедливо неравенство треугольника:
 . (7)
. (7)
Метрическое пространство всех действительных последовательностей, удовлетворяющих условию (5), с метрикой (6) называется гильбертовым пространством последовательностей и обозначается l2 .
Используя принцип сжимающего пространства можно преобразовать n-мерное метрическое пространство в 3-х мерное.
Положение точки в 3-х мерном пространстве определяется координатами X, Y,Z, которые вычисляются по формулам:
 , (8)
, (8)
где  , (9)
, (9)
X,Y,Z – координаты точки фазовой траектории; x,y,z – координаты контрольных точек системы; m – количество контрольных точек.
Задание.
Дано: координаты X,Y,H (табл.1,2,3 лаб.1)
1. По заданной математической модели изменения состояния объекта в фазовом пространстве (3) построить график функции  , где
, где
 ,
,
2. По заданной математической модели изменения состояния объекта в гильбертовом пространстве (4), (5), (6) построить график функции  , где
, где  , вычисляются по формулам (8), (9).
, вычисляются по формулам (8), (9).
Для этого:
1) Формируем матрицы ![]() (см. формулу (4))
(см. формулу (4))
Например, ![]() - матрица
- матрица ![]() , определяет состояние объекта на первый момент времени. Количество столбцов соответствует трем координатам X,Y,H, количество строк равно количеству марок.
, определяет состояние объекта на первый момент времени. Количество столбцов соответствует трем координатам X,Y,H, количество строк равно количеству марок.
2) Вычисляем по формулам (8), (9) значения матрицы
В результате вычислений получаем матрицу, где количество столбцов соответствует трем координатам X,Y,H, а количество строк равно количеству моментов времени.
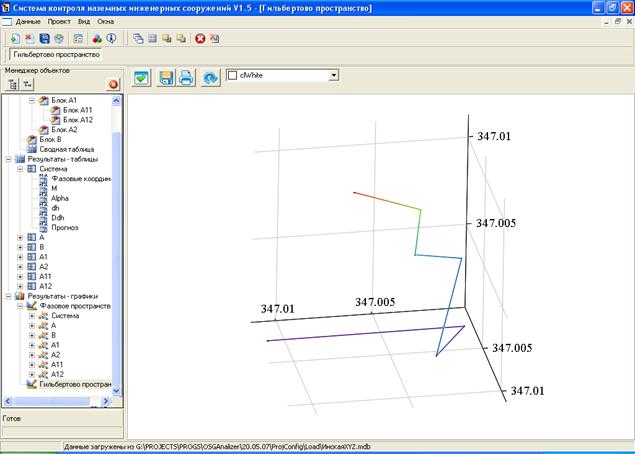
3) По полученной матрице ![]() строим график функции в трехмерной системе координат.
строим график функции в трехмерной системе координат.
Пример графика
Лабораторная работа №5
(литература: [1])
Тема: Оценка математической модели пространственно-временного состояния объекта.
При моделировании вертикальных движений сооружений по результатам измерений происходит потеря точности из-за приближённости математического описания реального континуального процесса движений дискретной моделью, ошибок измерений и ошибок округления при представлении чисел в ЭВМ.
Ошибки округления обычно оценивают, выполняя вычисления на ЭВМ по одному и тому же алгоритму с простой и двойной точностью. Когда ошибки исходных экспериментальных данных значительно превосходят ошибки округления при представлении чисел в ЭВМ, влияние последних на результаты моделирования пренебрегаемы и могут не учитываться. Приближённость математического описания реальных континуальных вертикальных движений по результатам повторных циклов наблюдений можно оценить, только изменив частоту повторных циклов, что экономически нецелесообразно и зачастую просто невозможно. Поэтому рассмотрим влияние на результаты моделирования только ошибок экспериментальных данных.
Обычно предполагают, что ошибки исходных данных распределены по нормальному закону с нулевым математическим ожиданием и дисперсией ![]() . При этих предположениях для оценки точности можно применить метод Монте-Карло и, выполнив достаточное число опытов, оценить точность моделирования вертикальных движений сооружения. Более простой, но менее надёжный путь оценки точности состоит в применении известных методов теории ошибок. Основной недостаток в этом случае состоит в необходимости линеаризации оцениваемых функций. Чтобы избежать принятия гипотез о функции распределения ошибок и необходимости линеаризации оцениваемых функций, используем метод имитационного моделирования для оценки точности результатов моделирования, полагая, что нам известна предельная абсолютная погрешность
. При этих предположениях для оценки точности можно применить метод Монте-Карло и, выполнив достаточное число опытов, оценить точность моделирования вертикальных движений сооружения. Более простой, но менее надёжный путь оценки точности состоит в применении известных методов теории ошибок. Основной недостаток в этом случае состоит в необходимости линеаризации оцениваемых функций. Чтобы избежать принятия гипотез о функции распределения ошибок и необходимости линеаризации оцениваемых функций, используем метод имитационного моделирования для оценки точности результатов моделирования, полагая, что нам известна предельная абсолютная погрешность ![]() определения исходных данных, связанная со средней квадратической погрешностью
определения исходных данных, связанная со средней квадратической погрешностью ![]() выражением
выражением  .
.
Для этого положим, что
 , (1)
, (1)
где ![]() – вектор ошибок исходных данных;
– вектор ошибок исходных данных;
![]() – вектор ошибок результатов моделирования.
– вектор ошибок результатов моделирования.
Следовательно,
![]() , (2)
, (2)
и для выполнения оценки точности результатов моделирования достаточно вычислить вектор (2). Координаты вектора ![]() зададим равным предельной погрешности исходных данных.
зададим равным предельной погрешности исходных данных.
Задача оценки точности результатов моделирования сводится к определению предельных значений фазовых координат ![]() и
и ![]() . Полагая предельную погрешность исходных данных равной ±D, можно определить векторы
. Полагая предельную погрешность исходных данных равной ±D, можно определить векторы ![]()
и ![]() значений левой и правой границ интервалов в пределах, в которых должны находиться значения исходных данных
значений левой и правой границ интервалов в пределах, в которых должны находиться значения исходных данных
![]() ,
,
![]() . (3)
. (3)
Имея значения  исходных данных, можно вычислить соответствующие значения фазовых координат
исходных данных, можно вычислить соответствующие значения фазовых координат ![]() и
и ![]() и графически или аналитически определить неустойчивые состояния объекта, где реальные значения фазовых координат превосходят предельно допустимые.
и графически или аналитически определить неустойчивые состояния объекта, где реальные значения фазовых координат превосходят предельно допустимые.
Пример
По данным, полученным из натурных геодезических измерений, рассмотрим изменение пространственного состояния объекта. Всего было выполнено
6 циклов наблюдений. Результаты моделирования приведены в таблице 1.
Таблица 1 – Результаты моделирования изменения
пространственного состояния объекта
Номер цикла | Временной интервал | Нормированная фазовая координата | Нормированная фазовая |
0 | 0 | 0 | 0 |
1 | 0.29 | 0,39305 | 0,57108 |
2 | 1.02 | 0,67493 | 0,98480 |
3 | 1.26 | 0,73558 | 1,01524 |
4 | 2.09 | 0,07532 | 1,02286 |
5 | 2.24 | 1 | 1 |
Для построения графика фазовой траектории по оси абсцисс будем откладывать нормированные значения ![]() , а по оси ординат – нормированные значения
, а по оси ординат – нормированные значения ![]() .
.
Анализ графика фазовой траектории даёт качественное представление об изменении состояния сооружения как целого. Этот график показывает, в каких циклах преобладает поступательное или вращательное движение сооружения или наоборот, отсутствие движения объекта, т. е. его устойчивость. Фазовая траектория (рисунок 3) свидетельствует о равномерности движений объекта в период с 0-го по 2-й циклы. Прямая, соединяющая три фазовые точки (0-1-2), расположенная практически под углом 45 градусов относительно осей координат, означает синхронность поступательного и вращательного движений. Фазовые точки 2, 3, 4 расположены рядом друг с другом, что может свидетельствовать об устойчивом состоянии объекта на данный период времени. Для подтверждения этого вывода необходимо выполнить оценку точности результатов моделирования.
|
Рисунок 3 – Фазовая траектория на плоскости
Условно полагая предельную абсолютную погрешность определения исходных данных D = 0,005 м, вычислим значения ![]() – вектора ошибок результатов моделирования.
– вектора ошибок результатов моделирования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
