


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
разрядов, а также узловые и смежные с ними пункты полигонометрии 1
и 2 разрядов. При построениях разрядной полигонометрии без узловых
пунктов в каталог включаются три пункта, расположенные в середине
хода.
11.29.5. В каталоги не включаются координаты пунктов
триангуляции и полигонометрии 4 класса, 1 и 2 разрядов, не
сохранившихся на местности или закрепленных на местности центрами,
не обеспечивающими их долговременную сохранность, за исключением
пунктов, являющихся исходными (рабочими) при привязке стенных
знаков.
11.29.6. Координаты пунктов, пониженных в разряде до съемочной
сети, помещают в "список координат и высот пунктов съемочной
сети". При незначительном их количестве (до 50) они могут быть
помещены в общем каталоге после списка основных пунктов.
11.29.7. Пункты триангуляции располагаются по убывающим
абсциссам, пункты полигонометрии и реперы нивелирования - по
линиям ходов между исходными пунктами.
11.29.8. В каталог значения координат пунктов помещаются с
точностью до 0,001 м, а дирекционные углы - до 0,1". Координаты
пунктов съемочной сети помещаются с точностью до 0,1 м.
Высоты центров в Балтийской системе высот 1977 года или, в
особых случаях, в системе высот от условного уровня независимо от
класса нивелирования выписываются в каталог до 0,001 м.
Высоты, полученные с помощью тригонометрического нивелирования,
выписываются до 0,1 м.
11.29.9. Дирекционные углы и длины линий выписываются для двух
направлений, идущих из точки, для которой выписаны координаты.
11.29.10. Между помещенными в каталог координатами,
дирекционными углами и длинами сторон должно быть строгое
соответствие.
11.29.11. Каталог высот пунктов нивелирования содержит:
обложку, титульный лист и оглавление;
пояснение;
список принятых сокращений;
чертежи нивелирных знаков;
список высот пунктов нивелирования;
схему ходов нивелирования.
11.29.12. Каталоги координат (высот) геодезических сетей со
схемами их расположения составляются в необходимом количестве
экземпляров, определяемом техническим проектом, но не менее трех.
Каталоги передаются в территориальные инспекции
государственного геодезического надзора и пользователям.
Один экземпляр каталога координат (высот), составленный в
государственной системе координат, передается на постоянное
хранение в Центральный картографо-геодезический фонд.
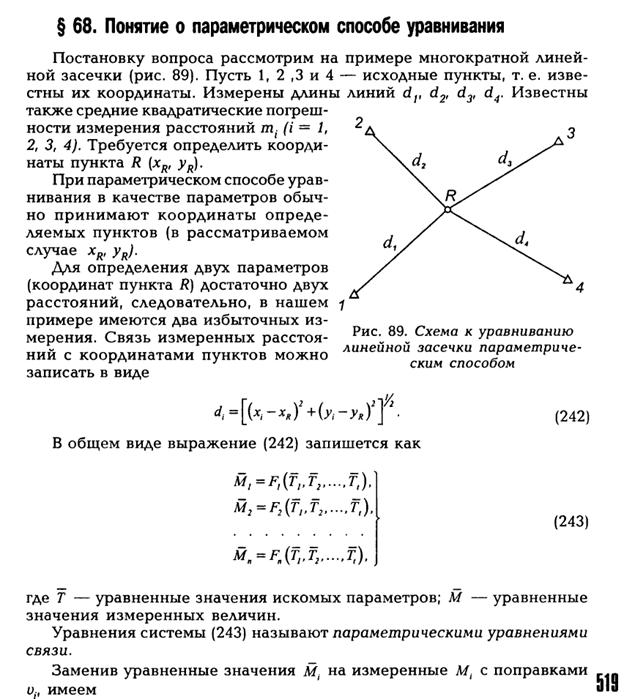
Предвычисление и оценка точности триангуляции
Предрасчет ожидаемой точности производится по формуле
 ,
,
где m - ошибка единицы веса, PF – вес рассматриваемой функции  , А – оценка математического ожидания функции измеренных величин. Для сети из 15-20 пунктов значение t с вероятностью 0.95 равно 2, с вероятностью 0.99 – t=2.5, с вероятностью 0.997 – t=3.
, А – оценка математического ожидания функции измеренных величин. Для сети из 15-20 пунктов значение t с вероятностью 0.95 равно 2, с вероятностью 0.99 – t=2.5, с вероятностью 0.997 – t=3.
 ,
,  ,
,
где v – поправки в измерение с весом p получаются из уравнивания, r – число условных уравнений или число избыточных измерений при уравнивании параметрическим способом.
Оценка точности производится по формуле Ферреро
 ,
,
где m - СКО измеренного угла (по внешней сходимости), n – число треугольников.
 ,
, ![]() ,
, ![]() ,
,
то есть ошибка «передачи» пропорциональна корню квадратному из числа треугольников ряда.

Тема 6. Методы построения прецизионной государственной геодезической сети с использованием глобальных спутниковых навигационных систем: Методика составления проекта спутниковой сети. Выбор аппаратуры, метода наблюдений. Методика наблюдений спутниковой сети. Полевые контроли. Объединение спутниковых и традиционных геодезических сетей. Функциональные и стохастические модели наблюдений. Свободное, минимально ограниченное и ограниченное уравнивание. Тестирование результатов уравнивания
6.1. Методика составления проекта спутниковой сети
Работа над проектом начинается со сбора и анализа материалов о геодезической и картографической изученности района работ. Сведения о выполненных ранее работах по триангуляции, полигонометрии, нивелированию и гравиметрическим определениям получают в территориальных инспекциях Госгеонадзора и в организациях, проводивших соответствующие работы.
В техническом проекте устанавливаются объемы работ, технология их выполнения, материально-техническое обеспечение и сметная стоимость. Текстовая часть проекта должна содержать:
- сведения о назначении проектируемых работ, плотности пунктов и их точности;
- сведения о ранее выполненных работах;
- краткую характеристику физико-географических и климатических условий района работ, влияющих на организацию и проведение спутниковых определений. Особенно важными факторами являются сведения о характере растительности, дорожной сети и проходимости местности, наличии помех в виде радиолокаторов, УКВ-передатчиков, ЛЭП. Для выбора аппаратуры важно указать возможный перепад температур на период работ; информация о глубинах промерзания и оттаивания грунтов, необходимая для правильного выбора типа центров; информация о гидрографическом режиме;
- обоснование выбора типа геодезических знаков;
- обоснование режима определения координат, типа аппаратуры и ее программного обеспечения, режимов измерений и технологии наблюдений;
- характеристика запроектированной сети, способы ее объединения с существующей сетью в плане и по высоте, схема расположения пунктов сети, названия пунктов полные и краткие для использования в качестве идентификаторов при вводе данных в аппаратуру и при работе с программным обеспечением;
- порядок обработки результатов наблюдений, выбор способов преобразований координат и высот;
- обеспечение техники безопасного ведения работ;
- сроки начала и окончания работ,
- расчет объемов работ, сметной стоимости, обоснование штатного расписания.
Главным фактором, определяющим выбор метода, безусловно, является его потенциальная точность. При выполнении геодезических работ обычно применяются четыре метода позиционирования:
- абсолютное позиционирование по кодовым псевдодальностям или пседодальностям, сглаженным по фазе несущей (точность на уровне единиц метров);
- дифференциальное позиционирование (локальное, региональное, широкозонное) по кодовым псевдодальностям или псевдодальностям, сглаженным по фазе несущей (точность на уровне одного метра);
- дифференциальное позиционирование по фазе несущей (точность 0.05-0.5 м);
- относительное позиционирование по фазе несущей (точность от единиц миллиметров до нескольких сантиметров при условии разрешения неоднозначностей).
6.2. Выбор аппаратуры, метода наблюдений
Полевое оборудование включает блоки приемников и вспомогательные приборы, такие как метеорологические сенсоры, штативы, трегеры, штанги-биноги, аккумуляторы, зарядные устройства и другое вспомогательное оборудование. Выбор соответствующего приемника зависит от особых требований проекта. Поэтому в этом разделе будут даны только некоторые общие соображения.
Типы приемников и антенн. Правильный выбор приемника и сопутствующей аппаратуры позволяет добиваться необходимой точности и высокой производительности при минимальных материальных затратах или предохраняет от неожиданных неприятностей. Нужно иметь также в виду, что многие приемники имеют набор опций, за каждую из которых необходимо доплачивать. Можно выстроить следующую примерную шкалу спутниковых приемников в зависимости от их стоимости:
- кодовый приемник для навигации по стандартному коду GPS или ГЛОНАСС,
- кодовый приемник с дифференциальнм режимом при пост-обработке,
- кодовый приемника с дифференциальным режимом в реальном времени,
- кодо-фазовый приемник (с неполным разрешением фазы),
- фазовый одночастотный приемник (статика обязательна, быстрая статика, кинематика истинная и Stop-and-Go – по необходимости),
- фазовый одночастотный приемник с теми же возможностями и с возможностями работы в реальном времени,
- фазовые двухчастотные приемники, по аналогии с одночастотными приемниками с возможностями статики, быстрой статики, истинной кинематики с инициализацией On-the-Fly или без нее, кинематикой Stop-and-Go, с возможностями съемки в реальном времени или только с пост-обработкой.
6.3. Методика наблюдений спутниковой сети
Статическое и кинематическое позиционирование. Режимом статики обозначают стационарное наблюдение положения, в то время как режим кинематики предполагает движение. Временная потеря захвата сигнала в статическом режиме не является такой критической, как в кинематическом режиме.
Термины «статика» и «кинематика» необходимо рассматривать в контексте точечного или относительного позиционирования. Типичные примеры этих режимов даются для того, чтобы познакомить читателя с этими терминами.
Статическое точечное позиционирование по кодам полезно, если необходимо иметь координаты точки с умеренной точностью (1-5 м).
Кинематическое точечное позиционирование можно использовать для определения трехмерной траектории аппарата как функции времени. Поэтому типичным примером для кинематического позиционирования является навигация судна. Некоторые приемники могут выполнять точную навигацию (траекторные измерения) по псевдодальностям, сглаженным фазой.
Статическое относительное позиционирование по фазе несущей является самым точным методом позиционирования и наиболее часто используется геодезистами. Этот метод предназначен для определения вектора базовой линии между двумя стационарными приемниками. В статических съемках достижимы точности и даже лучше, что эквивалентно миллиметровой точности на базовых линиях в несколько километров.
Кинематическое относительное позиционирование включает один стационарный и один движущийся приемник. Два приемника выполняют наблюдения одновременно. Основные применения этого метода в основном те же самые, что для кинематического точечного позиционирования, но достижима точность сантиметрового уровня. Использование радиосвязи между станциями базовой линии приводит к режиму кинематики реального времени (RTK). В зависимости от типа данных (фазы или фазовые поправки), которые передаются в реальном времени мобильному приемнику, метод относят к относительному или дифференциальному позиционированию.
В процессе развития GPS/ГЛОНАСС-технологий было разработано три режима статических измерений с применением фазовых приемников. Первый из них, появившийся как модификация интерферометрического метода радиоастрономии, называют классической статикой или просто - статическим режимом. Второй режим – быстрая статика (fast statiс или rapid static). Его принципиальное отличие от предыдущего режима заключается в уменьшении времени наблюдений на пункте, применении специальных алгоритмов для разрешения начальных неоднозначностей фаз, и как следствие от выигрыша времени, некоторую потерю точности. Третий режим получил название реоккупация.
В каждом из перечисленных режимов возможно применение как одночастотной, так и двухчастотной аппаратуры. Двухчастотная статика – наиболее универсальный режим измерений, в котором возможно достижение самой высокой точности и на самых больших расстояниях, вплоть до нескольких тысяч километров. В этом режиме иногда отдельно выделяется статика коротких, средних и длинных базовых линий. Четких количественных границ между этими понятиями не существует, и основной принцип деления основан на теоретических возможностях исключения определенных видов ошибок. На коротких базовых линиях уверенно исключается влияние ионосферы и тропосферы. В периоды минимума солнечной активности одночастотные приемники могут давать фиксированное решение на расстояниях до 60 км, в то время как в максимум солнечной активности с трудом дают решение на расстояние 10 км. Ошибки тропосферы перестают быть коррелироваными с расстояний около 15 км. В среднем можно считать, что под короткими расстояния понимаются обычные для классической триангуляции и полигонометрии расстояния в пределах до 15-25 км. По другому определению пределом для коротких расстояний является то расстояние, на котором становится ощутимым расхождение между результатами одночастотных и двухчастотных измерений. Подобным образом, верхний предел для средних расстояний можно определить как минимальное расстояние, на котором разрешение неоднозначностей на двух частотах не выполняется из-за доминирующего влияния ошибок опорных координат и орбиты. Диапазон расстояний для средних базовых линий предполагается примерно от 20-50 до 1000 км. Пределом расстояний для длинных базовых линий является возможность выполнения синхронных измерений. Чем длиннее расстояние между пунктами, тем меньше наблюдается общих спутников.
В статических режимах одновременно работают, по крайней мере, два приемника, и ожидается точность сантиметрового уровня. Один из них располагается на точке с известными координатами (опорный или базовый приемник), координаты второго приемника подлежат определению. Синхронизация работы приемников на уровне минут обеспечивается наблюдателями, которые включают аппаратуру в заранее установленное время. Синхронизация на уровне секунд достигается выбором в приемнике одинаковых интервалов между измерениями (интервал между эпохами наблюдений). Наиболее распространенные интервалы в 1, 5, 10, 15 и 30 с. Если в приемниках установлены разные интервалы между эпохами, то некоторые наблюдения могут оказаться несинхронными. Более точная синхронизация часов приемников обеспечивается навигационным решением по C/A-коду. Если точность однократного абсолютного определения координат 15 м, то это позволяет синхронизировать часы приемников на уровне с. Этот уровень точности определения времени достаточен для обеспечения одновременности наблюдений фазы несущей волны на отдельных станциях.
Наиболее важная проблема обработки фазовых измерений заключается в определении целого числа длин волн N(1), которое не фиксируется приемником при первом измерении. Это число называют начальной целочисленной неоднозначностью фазовых измерений. Для установления правильного значения этого числа программа, обрабатывающая базовую линию – процессор базовых линий, производит его подробное исследование.
Точность определения базовой линии зависит также от компенсации остаточных погрешностей шкал времени спутника и приемника. Чтобы достичь миллиметровой точности, необходимо исключать ошибки времени на уровне долей наносекунды. Достигается это с помощью образования одинарных, двойных и тройных фазовых разностей. В одинарных разностях (single difference) полностью исключаются ошибки часов спутника. В двойных разностях (double difference) исключается большая часть погрешности шкалы времени и задержки в каналах приемника. Главное свойство тройных разностей заключается в том, что они не зависят от начальных целочисленных неоднозначностей фазовых измерений. Поэтому тройные разности удобны для выявления и исправления потерь счета циклов. Они используются как отдельный этап в обработке, позволяющий устранить срывы в циклах и получить первое решение для положения полевого приемника.
Дополнительное преимущество двухчастотных фазовых измерений заключается в возможности образовывать комбинации фаз, измеренных на первой и второй несущих частотах. Разностная (широкополосная) комбинация эквивалентна измерениям на волне 86 см. Можно ожидать, что это потребует меньше наблюдений для определения позиции в пределах 86 см, чем более точное определение в 19 см. Следовательно, можно находить неоднозначности широкой полосы за очень короткий период наблюдений. Суммарная или узкополосная комбинация фаз эквивалентна измерениям на волне 10.2 см. Она также используется при уточнении целочисленных неоднозначностей. Наконец, комбинация фаз, свободная от влияния ионосферы, позволяет почти полностью исключить влияние этого слоя атмосферы.
В общем случае получаемые из решения неоднозначности не являются целыми из-за остаточных ошибок моделей, заключающихся в невозможности математически точно описать спутниковые орбиты, влияние ионосферы и тропосферы и т. п. Поскольку известно, что неоднозначности должны быть целыми, а не вещественными, можно усилить решение, получая целые оценки неоднозначностей. Если выполнить надежное округление до целого удается, говорят о «фиксированном решении» для базовой линии, в противоположность «плавающему решению». Для достижения сантиметровой точности всегда необходимо получать фиксированное решение.
Двухчастотные измерения почти всегда дают более точное решение, чем одночастотные измерения, за счет более строгого учета ионосферы, большего объема данных и возможности использования комбинаций фазовых отсчетов. Последнее обстоятельство чрезвычайно важно для уверенного разрешения неоднозначностей. Так, одночастотная статика имеет предел вкм, иногда при благоприятных условиях и при соблюдении некоторых требований - несколько больше, а одночастотная быстрая статика - в 5 – 10 км.
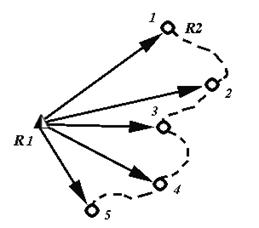
Рис. Обход точек при съемке в режиме быстрой статики.
Быстрая статика разработана на основе классической статической съемки. Цель быстростатической съемки – точно определить базовую линию за максимально короткое время. Один приемник устанавливается на опорной точке и непрерывно следит за всеми видимыми спутниками. В это время со вторым приемником последовательно обходят все точки, оставаясь на каждой из них несколько минут. Использование процессоров базовых линий, специально разработанных для быстрой статики, позволяет разрешить неоднозначности по этим кратковременным измерениям. Быстрая статика идеально подходит для измерений, где необходимо определять много точек, расположенных поблизости от опорной точки, и где можно пренебречь влиянием ионосферы и тропосферы. Преимущество этого режима перед обычной статикой в сокращении времени в 2 - 4 раза, преимущество перед кинематикой Stop-and-Go в том, что не нужно поддерживать непрерывный захват спутников во время движения от точки к точке. Каждая точка наблюдается независимо от других, а при перемещении на другую точку приемник может выключаться. Недостатком быстростатических решений базовых линий является слабое исключение многопутности из-за коротких сеансов наблюдений.
Измерения в режиме быстрой статики очень похожи на статические измерения. Главное различие между двумя режимами - это то, что время для определения базовой линии в быстростатическом режиме намного короче и, как следствие, обычно точность ниже, а предельные расстояния между пунктами ограничены км.
Типичные установки приемника для быстростатических измерений:
- минимальное количество спутников 4 (5 или больше),
- интервал между эпохами 5 с,
- угол отсечки по высоте 13°.
Время наблюдений на каждой точке при определении базовой линии зависит от количества спутников и от спутниковой геометрии. При величине геометрического фактора PDOP меньше 7 рекомендуется следующее время нахождения на точке:
- при четырех спутниках - время более 20 минут,
- при пяти спутниках – 10 – 20 минут,
- при шести и более спутниках - 5 – 10 минут.
При коэффициентах PDOP, близких к 7, лучше продлить сеанс, «перестраховаться».
При проведении съемки в режиме быстрой статики приемник, расположенный на опорной точке обычно запускается в режиме обычной статики, а полевой приемник может стартовать либо в режиме быстрой статики, либо в режиме кинематики.
Использование быстростатического режима наблюдений, как правило, обеспечивается специальным индикатором, показывающим, как долго снимается базовая линия. Приемник использует значения геометрических факторов и количество спутников для того, чтобы оценить, когда можно закончить наблюдение базовой линии, или указать для линии какой длины достаточно данных.
Работа на пункте. Работа начинается с вскрытия центра, установки штатива, центрирования, установки антенны и подсоединения ее к приемнику. Важно правильно расположить аппаратуру. Далее: измерение высоты и запуск измерений.
Спутниковые приемники являются достаточно универсальными, с ними можно добиваться различных уровней точности, изменяя установки и режимы, в соответствии с которыми они работают. С другой стороны, когда на объекте работает несколько наблюдателей, важно, чтобы получаемые результаты были согласованы между собой и обладали одинаковым уровнем точности. Это достигается установкой в приемниках соответствующих параметров миссии, то есть условий наблюдений и режимов выполнения работы. Сюда могут относиться такие параметры, как режим работы (статика, кинематика, кинематика в реальном времени и т. п.), минимальное количество спутников, при котором выполняется позиционирование, угол отсечки по высоте, допустимое отношение уровней сигнала и шума (маска SNR), допустимая величина коэффициента потери точности PDOP или GDOP и ряд других параметров.
Некоторые установки касаются работы приемника (одно- или двухчастотный режим, подключение внешней базы времени и т. д.) или создают необходимый уровень сервиса (единицы измерений, продолжительность звукового сигнала и т. п.). Есть несколько способов ввода параметров. В одних приемниках они установлены в заводских условиях, то есть зашиты в управляющей программе, и не подлежат изменению. Приемник сигнализирует о готовности к работе загоранием светового индикатора. В других приборах наблюдатель сам устанавливает параметры. В аппаратуре третьего типа заранее готовится так называемый конфигурационный файл миссии, содержащий указанные установки. Перед началом наблюдений все наблюдатели, участвующие в сеансе, должны сделать файл миссии текущим, то есть установить согласованные параметры работы приемника.
Из-за разнообразия спутниковой аппаратуры, способов управления, степени автоматизации и других факторов нет необходимости рассказывать обо всех параметрах, и здесь мы остановимся только на трех параметрах: угол отсечки по высоте, продолжительность сеанса и интервал регистрации.
Угол отсечки по высоте (маска высоты) – это высота спутника над горизонтом, начиная с которой приемник выполняет измерения при восходе спутника или прекращает измерения при его заходе. Чем меньше этот угол, тем больше спутников доступно приемнику и тем более высокую точность можно достигать. Однако у низких спутников обычно повышается уровень шума в измерениях. Зависимость шума измерений от угла высоты вызывается главным образом диаграммой направленности коэффициента усиления антенны приёмника, другие факторы, такие как атмосферное затухание сигнала, дает значительно меньший вклад. Повышение масок высоты способствует прохождению лучей при более благоприятных условиях, уменьшает вероятность возникновения многопутности, но иногда приводит к ухудшению геометрических факторов из-за уменьшения числа доступных спутников.
С появлением многоканальных приемников, наблюдающих все, что видит (all-in-view), проблема маски высоты становится менее актуальной. Рекомендуемая маска высоты для фазовых приемников 15° при статических измерениях и 10° или 13° для быстрой статики и кинематических измерений.
Продолжительность сеанса измерений. Известно, что однократное измерение фазы несущей производится с точностью до миллиметра и даже лучше (1.0-0.1% от длины волны), и чтобы обеспечить геодезическую точность наблюдений было бы достаточно пары измерений за 5 – 10 секунд времени. Почему же необходимы длительные сеансы? Объясняется это необходимостью определения целого числа длин волн несущих колебаний в расстоянии от антенны спутника до антенны приемника в момент первого наблюдения каждого спутника. Это число называют неоднозначностью фазовых отсчетов, его величина превышает 107. Минимальное количество эпох, при котором число измерений превышает число неизвестных, равно двум. Однако только достаточно длительные измерения в совокупности с хорошей геометрией расположения пунктов и космических аппаратов обеспечивают наблюдаемость данной динамической системы, обеспечивая несмещенную оценку вектора определяемых параметров.
В относительном методе наблюдений продолжительность сеанса определяется следующими факторами:
- длина базовой линии,
- количество наблюдаемых спутников,
- геометрия спутников относительно наблюдателя и ее изменение в течение сеанса,
- отношение сигнал-шум принятого сигнала.
Чем больше доступных спутников и лучше геометрия (меньше геометрические факторы DOP), тем меньше необходимая продолжительность сеанса. Например, для измерения одночастотным приемником линии длиной 1 - 2 км при наличии 6 спутников обычно достаточно 20 минут. Более длинные линии для получения хороших результатов требуют наблюдений в течение 90 минут и более. Большое влияние на качество решения оказывают окружающие антенну препятствия, вызывающие потери захвата сигнала и многопутность. Восстановление счета циклов непрерывной фазы является сложной задачей и при большом количестве потерь сигналов программа не всегда справляется с этой задачей. По этой причине спутниковые наблюдения под геодезическими сигналами обычно не обеспечивают аппаратурную точность. Для одночастотных приемников большое значение играет уровень солнечной активности, поскольку с ним связана концентрация в ионосфере заряженных частиц и, следовательно, связанная с ней величина ионосферной задержки.
Обычные значения для продолжительности сеансов в режиме статических наблюдений (особенно при длине базовых линий до 20 км) приведены в табл.. Эти значения основаны на видимости не менее 4-х спутников, хорошей геометрии и нормальных атмосферных условиях. Заметим, что дополнительные спутники позволяют уменьшить продолжительность сеанса примерно на 20%, эти цифры могут не оставаться слишком постоянными, однако, они гарантируют правильное разрешение неоднозначности и, таким образом, высокие точности.
Продолжительность сеансов для статических измерений
[Hofmann-Wellenhof et al. 2001].
Приёмник | Обычная статика | Быстрая статика |
Одночастотный | 30мин.+3мин./км | 20мин+2мин/км |
Двухчастотный | 20мин.+2мин./км | 10мин+1мин/км |
Наилучший метод определения оптимальной продолжительности сеанса в больших проектах – это сделать более чем нормальное наблюдение в первый день работ, получив типичные данные наблюдений. Например, можно сделать наблюдения продолжительностью 60 минут для коротких (1-5 км) линий и 120 минут для более длинных линий (5-20 км). Эти данные при обработке дают хорошие результаты. Затем эти данные можно обработать несколько раз повторно, сокращая последовательно объем данных и сравнивая с результатами по полному объему данных. Так можно подобрать приемлемую продолжительность сеанса.
Интервал регистрации. Интервал записи данных в приемнике обычно выбирается кратным минуте. Наиболее популярный интервал для записи измерений в статических съемках – 15 секунд. При длительных сеансах устанавливается интервал 20 или 30 секунд, напротив, для быстрой статики предпочтительнее интервал в 5 секунд для одночастотных измерений и 10 секунд – для двухчастотных измерений.
Что лучше: наблюдать 5 минут с дискретностью в 1 секунду (получается 300 эпох измерений) или 25 минут с дискретностью 5 секунд (также 300 эпох измерений)? Ответ такой: для уверенного разрешения неоднозначностей фаз второй случай предпочтительнее, так как за 25 минут спутники переместятся в пространстве на большие дуги, свободные члены в уравнениях поправок будут вычисляться более уверенно.
Другой фактор, который также необходимо учитывать, это проблема восстановления потерь счета циклов. Эта проблема лучше будет решаться в первом случае, где точки на траекториях будут располагаться чаще, и их можно увереннее аппроксимировать какими-либо функциями. Поэтому в длительных сеансах обычно антенны стараются располагать в местах, лишенных препятствий.
6.4. Полевые контроли
Контроль качества спутниковых наблюдений. Отдельные базовые линии. Разработчики процессоров базовых линий указывают на ряд показателей, характеризующих качество определения компонент векторов базовых линий. Универсальных показателей правильности решения нет, и авторы программ часто справедливо напоминают, что выполнение всех критериев качества не гарантирует правильности решения.
Прежде всего, это тип окончательного решения. Лучшим типом решения для одночастотных измерений являются фиксированное по двойным разностям, для двухчастотных измерений – фиксированное по двойным разностям ионосферно-свободной комбинации фаз. Плавающие решения, как правило, приемлемы для средних базовых линий, в десятки и сотни километров длиной. Погрешности таких решений обычно больше половины длины волны, то есть 10 см.
При расстояниях между пунктами в 20-30 км средние квадратические ошибки длины вектора базовой линии и его компонент в общеземной или локальной геодезической системах обычно находятся в пределах 1 – 2 мм. К средней квадратической ошибке одного измерения очень близка ошибка rms. Полезную информацию о погрешностях дает апостериорная ковариационная матрица (кофакторная матрица). Однако эти данные характеризуют точность лишь по внутренней сходимости.
Объем отвергнутых измерений, по мнению разработчиков ПБЛ, не должен превышать 10 % от всего объема данных.
В связи с тем, что для системы уравнений поправок находится несколько наборов целочисленных неоднозначностей, выбор лучшего из них производится на основании F-теста или Ratio. В этом исследовании соответствующие каждому набору дисперсии располагаются в порядке возрастания и берется отношение дисперсии второго претендента на решение к дисперсии первого претендента на решение ![]() то есть к наименьшей из всех дисперсий:
то есть к наименьшей из всех дисперсий:
 . (1)
. (1)
Полагая, что лучшему решению соответствует минимальная дисперсия, обычно при Ratio > 1.5 с вероятностью 95 % ПБЛ присваивает ему тип фиксированного решения. Если Ratio£1.5, то первому претенденту на решение присваивается тип плавающего решения.
Тест на относительную дисперсию Reference Variance (RV) проверяет соответствие апостериорной ![]() и априорной
и априорной ![]() дисперсий:
дисперсий:
 (2)
(2)
Относительная дисперсия является индикатором того, насколько хорошо наблюдалась базовая линия. Эта величина не имеет размерности, иногда ее называют коэффициентом дисперсии или дисперсией единицы веса. Она показывает, насколько полученные данные соответствуют тому, что ожидалось получить. Априорная дисперсия рассчитывается на основе предсказания о нормальном уровне ошибок в измерениях (уровне шумов). Если предположения о суммарном влиянии ошибок оправдалось, то RV=1. При RV<1 можно утверждать, что данные получены более качественные, чем ожидалось, при RV>1 - ожидания не оправдались. Для одночастотных статических измерений нормальное значение относительной дисперсии может быть около 4, а для кинематических съемок, когда положение выводится из 1 – 2 эпох, Reference Variance может быть порядка 5 – 6 и более.
Высокое Reference Variance и низкое Ratio могут быть следствием ряда причин:
· шумные данные, вызванные частичными препятствиями, например, деревьями, данными от спутников вблизи горизонта,
· значительная многопутность,
· немоделируемые систематические ошибки, особенно при одночастотных измерениях на линиях длиннее 15-20 км, где могут быть проблемы с учетом ионосферной рефракции,
· неправильный выбор фиксированного решения.
Линия в 30 км, измеренная одночастотными приемниками, может иметь относительную дисперсию от 10 до 20 из-за влияния ионосферы. Линия в 1 км, измеренная в режиме быстрой статике в 5-минутном сеансе, может иметь высокую относительную дисперсию из-за многопутности. Наблюдения двухчастотной аппаратурой небольших базовых линий (до 10 км) дают относительную дисперсию 0.8-1.0, если на обоих концах линии отсутствуют препятствия. Если на одном конце находится 4-х метровая пирамида из металлического уголка, относительная дисперсия возрастает до 2 – 4 , если пирамиды на обоих концах, - то до 6 – 8. Несмотря на то, что сигналы не имеют потерь в счете циклов, возникающая из-за стоек пирамиды многопутность ухудшает качество измерений [Антонович, 1997].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
