

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Опыт радиолокационных тренажёров показывает, что расчет маневра на расхождение с 3-4 опасными судами и полная оценка ситуации, ранее без использования САРП, практически занимала все время упреждения. В этих условиях оперативный контроль зачастую не производился, и судоводитель работал в неоптимальном режиме, поэтому вероятность безошибочного выполнения операции снижалась до значения Р-0,8.
При использовании САРП расчет маневра заменяется его имитацией, т. е. проигрыванием задуманного изменения курса и/или скорости с индикацией на экране индикатора нового положения символов целей на условный момент окончания маневра. Такое представление результатов маневра значительно сокращает время судоводителя для создания оперативного образа и полной оценки ситуации.
Таблица 2
Число логических операций | Р |
1-2 | 0,995 |
3 | 0,99 |
4 | 0,98 |
5 | 0,90 |
При этом необходимо отметить широко известные в эргономике особенности поведения оператора:
− судоводители охотнее рискуют при трудных (неопределенных), чем при легких (определенных) стандартных решениях;
− ему требуется больший объем информации для изменения своего решения, чем для его первоначального принятия;
− он чувствителен к достоверности источника информации; при увеличении количества противоречивой информации судоводитель стремится к его уменьшению.
Опыт и подготовка штурманов улучшает деятельность по принятию решений, при этом их практическая подготовка является доминирующей. В силу этих причин обучение на тренажере в настоящее время рассматривается, прежде всего, как тренировка способности принимать решение.
В заключение можно сделать вывод, что человеческий фактор при ведении радиолокационного наблюдения является одним из важнейших условий, от которого зависят эффективность и надежность применяемых средств и методов.
Литература:
1. Ломов и теоретические проблемы психологии.- М.: Наука, 19с.
2. Рекомендации по использованию судовой РЛС для предупреждения столкновений судов.–М.: В/О «Мортехинформреклама», 1983.–48 с.
3. Справочник по инженерной психологии / Под ред. .- М.: Машиностроение, 19с.
ПЛОТНОСТЬ ВИДИМЫХ СПУТНИКОВ НА НЕБЕСНОЙ СФЕРЕ
, ,
МГУ им. адм. , г. Владивосток
Спутники системы Навстар GPS по сути дела являются радионавигационными ориентирами, с помощью которых определяется место судна по расстояниям. Из элементарных рассуждений становится ясно, что от расположения спутников относительно антенны приёмника СРНС Навстар GPS зависит точность определения места. Косвенным показателем, с помощью которого принято оценивать точность текущих обсервованных координат, в приёмниках GPS выступает горизонтальный геометрический фактор, или HDOP (Horizontal Dilution of Precision). В документе [1] упоминается о том, что точность определения места зависит от географических координат судна. К сожалению, HDOP не в состоянии учесть влияние широты и долготы, а поэтому не может применяться для оценки потенциальной точности в данном районе плавания. В силу этого возникает необходимость критерия, учитывающего особенности прохождения спутников относительно наблюдателя в данной точке поверхности Земли.
Видимое перемещение спутников по небесной сфере относительно неподвижного наблюдателя строго детерминировано вследствие постоянства параметров орбит. Когда же вследствие неизбежных возмущений параметры орбиты изменяются и выходят из заданных пределов, спутник по команде с Земли выполняет соответствующий манёвр. Следовательно, положение спутников на небесной сфере всегда можно предвычислить, зная параметры его орбиты. Отсюда следует другой вывод: спутники на небесной сфере не могут занимать какое угодно положение относительно неподвижного наблюдателя в данной точке земной поверхности. Таким образом, если в течение длительного времени фиксировать координаты видимых спутников и наносить их, скажем на звёздный глобус, то окажется, что плотность распределения спутников на небесной сфере будет неодинаковой. Там, где она выше, спутники будут наблюдаться чаще в течение длительного времени. Если диаметрально противоположные участки сферы имеют различные плотности, то по этому направлению следует ожидать большие средние квадратические погрешности определения обсервованных координат судна, так как случайные погрешности измерения псевдодальностей не компенсируются.
Чтобы рассчитать плотность спутников по различным участкам небесной сферы и оценить распределение плотностей, необходимо сначала решить задачу деления небесной сферы на равные по площади части. Обозначим через h высоту спутника. Высотой будем считать угол между плоскостью горизонта и направлением на спутник из точки наблюдателя O. Угол h отсчитывается от 0˚ до 90˚. Азимутом спутника A будем считать угол между нордовой частью истинного меридиана наблюдателя и направлением из точки O на точку проекции спутника на плоскость горизонта. Азимут отсчитывается от 0˚ до 360˚ по ходу часовой стрелки.
Судовые приёмники СРНС Навстар GPS выбирают для определения места спутники не с любыми высотами. Как правило, сигналы спутников с высотами менее 10˚ и более 70˚ не используются для получения обсервованных координат. Следовательно, необходимо получить формулы деления на равные части пояса верхней небесной полусферы.
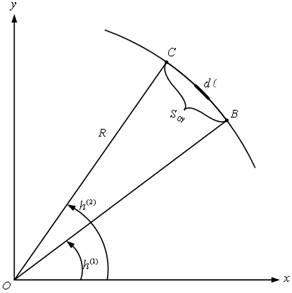
Рис. 1. Определение площади шарового пояса
Чтобы решить эту задачу, необходимо сначала получить формулу для расчёта длины дуги, заключённой между высотами ![]() и
и ![]() верхней полусферы. Пусть радиус небесной сферы будет
верхней полусферы. Пусть радиус небесной сферы будет ![]() . Обратимся к рис. 1.
. Обратимся к рис. 1.
Уравнения окружности в параметрической форме запишутся следующим образом:
![]()
Запишем их производные
![]()
Площадь шарового пояса ![]() можно выразить так:
можно выразить так:
где ![]() – дифференциал дуги, заключённой между высотами
– дифференциал дуги, заключённой между высотами ![]() и
и ![]() .
.
Тогда
Обозначим через φ ширину по горизонту участка шарового пояса полусферы (см. рис. 2).
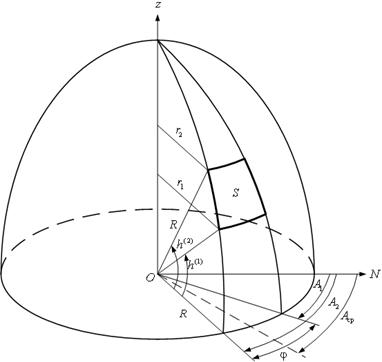
Рис. 2. Пояснение к вычислению площади участка
Понятно, что ![]() Тогда площадь
Тогда площадь ![]() участка шарового пояса шириной
участка шарового пояса шириной ![]() можно вычислить по следующей формуле:
можно вычислить по следующей формуле:
![]()
Получим формулы для вычислений высот, между которыми будут располагаться равные по площади части. Пусть их число будет равным n. Примем также, что ![]() Тогда
Тогда
![]()
![]()
![]()
![]()
![]()
Каждый из равных по площади частей шарового пояса необходимо обозначать. Вполне естественно каждую часть задавать азимутом середины сектора ![]() и средней высотой, которая делит каждую часть на две равные по площади половины.
и средней высотой, которая делит каждую часть на две равные по площади половины.
Понятно, что число p участков площади S будет равно  Если принять азимут середины первого участка совпадающим с направлением на север, то азимут середины второго участка будет равен
Если принять азимут середины первого участка совпадающим с направлением на север, то азимут середины второго участка будет равен ![]() Отсюда азимут середины j-го участка можно вычислить как
Отсюда азимут середины j-го участка можно вычислить как  где
где 

Получим формулу для средней высоты k-й части шарового пояса.
![]()
![]()
![]()
Чтобы вычислить плотность, достаточно зафиксировать через равные промежутки времени координаты спутников (азимут и высоту), а затем подсчитать их количество, приходящееся на каждую часть шарового пояса небесной сферы. В результате будет получен двумерный ![]() массив, служащий характеристикой потенциальной точности определения обсервованных координат.
массив, служащий характеристикой потенциальной точности определения обсервованных координат.
Литература
1. Global Positioning System. Standard Positioning Service Signal Specification. 2nd Edition, June 2, 1995. – 89 p.
ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ОРИЕНТИР С ПОМОЩЬЮ GPS-ПРИЁМНИКА GP-37
,
МГУ им. адм. , г. Владивосток
Необходимость точного определения поправки курсоуказателя возникает перед выходом судна в рейс, например, после прихода гирокомпаса в меридиан. Такая процедура выполняется на ошвартованном судне. В качестве удалённых ориентиров в этом случае выбираются такие точечные ориентиры, которые нанесены на карту крупного масштаба или на план. В последние годы решение подобных задач значительно упростилось в связи с переходом большинства государств на изготовление морских карт в геодезической системе координат WGS-84.
Для пояснения постановки задачи данного исследования обратимся к рис. 1.
Рис. 1. Погрешность направления на удалённый ориентир
Пусть в точке O находится антенна судового приёмника СРНС Навстар GPS. Координаты точки O (X, Y) известны с высокой точностью, так как получены осреднением n текущих обсервованных координат приёмника за длительный промежуток времени, например, за сутки.
 (1)
(1)
Координаты ориентира (φ0, λ0), расположенного в точке A , также известны заранее с высокой точностью. Поэтому будем считать угол α0 истинным направлением на ориентир. В i-й момент времени приёмник определяет свои текущие координаты φİ , λİ . Отсюда возникает задача оценки погрешности εİ , которая создаётся в ситуациях, когда штурман принимает обсервованные координаты φİ , λİ в качестве X, Y при расчётах истинного направления на ориентир.
Для решения поставленной задачи сначала преобразуем координаты, выраженные в угловой мере, в линейную меру таким образом:
 (2)
(2)
![]()
где x0, y0 – линейные координаты (в метрах) ориентира относительно начала координат в точке O, xi, yi – линейные координаты (в метрах) текущего обсервованного места судна относительно начала координат в точке O, φ0, λ0 – широта и долгота ориентира, Y, X – долгота и широта соответственно истинного места установки антенны судового приёмника,  – длина (в метрах) одной минуты меридиана и одной минуты параллели соответственно в точке установки антенны приёмника СРНС Навстар GPS.
– длина (в метрах) одной минуты меридиана и одной минуты параллели соответственно в точке установки антенны приёмника СРНС Навстар GPS.
Обозначим через αi угол, который отсчитывается от оси X до линии, проходящей через точку с текущими координатами xi, yi и место ориентира. Величина этого угла определится так:
 (3)
(3)
Если пренебречь погрешностью определения места судна (ОМС) с помощью судового приёмника СРНС Навстар GPS (точки O), то образующаяся вследствие этого текущая погрешность εi расчёта направления на ориентир естественно определится как разность
 (4)
(4)
Понятно, что абсолютная величина εi убывает с увеличением расстояния до ориентира. Здесь давно назрела необходимость исследования самого угла εi с тем, чтобы при малых расстояниях до ориентира, еcли не исключить его полностью, то существенно уменьшить. В Приложении 4 к Рекомендациям по организации штурманской службы на судах Минморфлота СССР (РШС-89) учреждается минимальное расстояние до ориентира 200 м. Зададимся этим расстоянием в дальнейшем анализе.
Для решения поставленной задачи в качестве метода исследования выбрано имитационное моделирование. В нём случайные величины φİ и λİ не генерировались с помощью ЭВМ, а последовательно выбирались из массива реальных наблюдений за работой приёмника СРНС Навстар GPS GP-37. Наблюдения были выполнены автором осенью 2006 года на высокоточном полигоне в Артёмовской топографо-геодезической экспедиции Приморского аэрогеодезического предприятия. Для данного моделирования были взяты суточные наблюдения с 0 часов до 24 часов UTC 7 октября. После устранения сбойных записей и дополнительного форматирования получился массив, состоящий из 43194 пар обсервованных широт и долгот. Затем были выполнены расчёты по формулам (1) – (2).
Чтобы оценить влияние величины пеленга с судна на ориентир (K0) на исследуемую погрешность, расчёты по формулам (3) – (4) выполнялись для K0 от 0° до 110° с шагом 5°. При этом расстояние до ориентира оставалось неизменным и равным 200 м. В результате вычислений было получено 23 массива погрешностей εi , каждый из которых содержал 43194 элемента. Далее для каждого массива по известным формулам были рассчитаны средние значения погрешностей и их средние квадратические отклонения (СКО). Результаты вычислений представлены на графиках рис. 2.
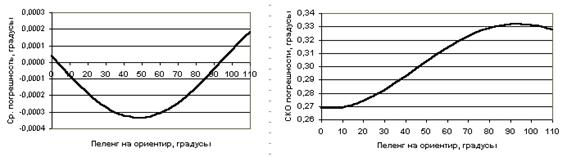
Рис. 2. Зависимость средней погрешности и СКО от пеленга
На рис. 2 видно, что средние значения погрешностей определения истинных направлений (левая панель) ничтожно малы и не превышают по абсолютной величине 0,0004 градуса. Тем не менее, характер изменения средних значений позволяет сделать заключение о том, что большая ось фигуры погрешностей обсервованных координат, использованных в имитационном моделировании, не параллельна меридиану. Дальнейшие расчёты позволили определить, что большая ось фигуры погрешностей отклонена от меридиана на 3,3 градуса к востоку.
Гораздо больший интерес представляет правая панель рис. 2, на которой можно видеть, что СКО погрешностей меняются от 0,2683 градусов до 0,3322 градусов. Отсюда можно сделать важный вывод о том, что при использовании приёмников СРНС Навстар GPS заявленных в РШСметров до удалённого ориентира явно недостаточно для достижения точности не хуже 0,1 градуса. На графике видно, что минимальная погрешность достигается тогда, когда ориентир находится по пеленгу 3,3 градуса, а минимальная – по пеленгу 93,5 градуса. Следовательно, если известна ориентация главных осей фигуры погрешностей обсервованных координат, получаемых приёмником СРНС Навстар GPS на стоянке судна, то ориентир для пеленгования необходимо выбирать так, чтобы он располагался как можно ближе к большей оси этой фигуры.
Чтобы иметь представление о характере распределения случайной величины εi , на рис. 3 изображена гистограмма для ориентира, расположенного по пеленгу 95 градусов.
Рис. 3. Гистограмма распределения погрешностей
На гистограмме ширина интервала равна 0,2 градуса. На ней видно, что максимум частоты приходится не на 0 градусов, а на интервал с серединой 0,2. Этот факт свидетельствует об асимметрии расположения обсервованных координат, полученных приёмником GP-37 7 октября 2006 года, относительно линии истинного пеленга 95 градусов. Факт асимметрии также подтверждает результат расчёта моды распределения случайной величины εi для этого пеленга. Величина моды составила 0,13057 градуса, что значительно отличается от нулевого значения, которое бы соответствовало симметричному характеру распределения погрешностей εi .
Несколько ранее автором подобное исследование проводилось с приёмником СРНС Навстар GPS GP-270ML. Для оценки зависимости точности определения направления на ориентир от типа приёмника будет полезным сравнение результатов моделирования с использованием координат GP-37 и GP-270ML. Сравнение характеристик точности можно выполнить с использованием таблицы 1. В ней строки “Размах” означают размахи варьирования εi по данному пеленгу на ориентир.
Таблица 1
Результаты моделирования точности определения направлений по координатам приёмников GP-270ML и GP-37
Пара- метры точности | Пеленг на ориентир, градусы | ||||
10 | 20 | 40 | 60 | 80 | |
GP-270ML | |||||
Среднее εi | 0,0026 | 0,0015 | 0 | -0,0001 | 0,0014 |
СКО εi | 0,5059 | 0,5388 | 0,6614 | 0,7913 | 0,8769 |
Размах | 4,085 | 4,938 | 6,162 | 6,629 | 6,771 |
GP-37 | |||||
Среднее εi | -0,00007 | -0,00018 | -0,00032 | -0,00031 | -0,00015 |
СКО εi | 0,2692 | 0,2742 | 0,2927 | 0,3143 | 0,3291 |
Размах | 2,039 | 2,032 | 2,052 | 2,438 | 2,693 |
Сравнение средних величин погрешностей позволяет сделать вывод о том, что при использовании приёмника GP-37 достигается точность почти на порядок выше. В два раза у этого приёмника СКО меньше по сравнению с приёмником GP-270ML. Такой же вывод можно сделать о размахе варьирования погрешностей. Следовательно, применение приёмника GP-37 предпочтительнее по сравнению с приёмником GP-270ML.
В заключении следует сказать о том, что подобные исследования необходимо продолжить в направлении оценки скорости сходимости осреднённых координат к их истинному значению. Здесь неизбежно возникнет проблема оценки вклада систематических погрешностей определения обсервованных координат. К сожалению, до сих пор известно только, что систематические погрешности зависят от типа приёмника СРНС Навстар GPS, времени суток и сезона, а также от широты места.
РЕГРИСИОННЫЙ АНАЛИЗ ЗАВИСИМОСТИ СЛУЧАЙНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ ПРИЕМНИКОМ GP-37 НА ХОДУ СУДНА
,
МГУ им. адм. , г. Владивосток
Работа любого измерителя скорости судна характеризуется неизбежным присутствием в его показаниях систематических и случайных погрешностей. Систематические погрешности принято исправлять поправками, которые зависят от скорости судна. Поправки определяются на мерной линии или другим способом. Что же касается случайных погрешностей, то считается, что при длительном плавании постоянной скоростью они компенсируют друг друга и в конечном итоге не оказывают влияния на точность определения лагом пройденного судном расстояния.
В последние годы интересы создателей судовых измерителей скорости стали всё чаще распространяться на проектировании систем, обеспечивающих безопасную швартовку и доковые операции крупнотоннажных судов. Достаточно перспективным техническим решением в этой области выглядит объединение в одну систему приёмников спутниковой радионавигационной системы (СРНС) Навстар GPS, устанавливаемых на носу и на корме судна. В таких системах величины случайных погрешностей измерения мгновенной скорости могут существенно повлиять на результат того или иного решения по управлению судном, что, в свою очередь, может привести к крайне нежелательным последствиям для корпуса судна и для причала. Причал начинает разрушаться, если на заключительном этапе швартовки крупнотоннажного судна его скорость превышает 0,05 м/с – 0,08 м/с [1]. Современные профессиональные судовые GPS‑приёмники, например NavTracXL, способны измерять абсолютную скорость с разрядностью 0,01 узла (0,00514 м/с) [2,3,4]. Чаще всего на судне можно встретить приёмники СРНС, измеряющие абсолютную скорость с разрядностью 0,1 узла (0,0514 м/с), чего недостаточно для реализации системы швартовки.
На точность измерения абсолютной скорости GPS-приёмником оказывают влияние многие факторы. Многочисленные эксперименты с разными типами приёмников на неподвижном основании позволили выявить зависимость статистических характеристик случайных погрешностей скорости от восхода-захода Солнца, времени суток, геомагнитной обстановки, горизонтального геометрического фактора и среднего значения скорости [4 – 14]. В ходе морских испытаний на движущимся судне с целью оценки чувствительности приёмников был выявлен ранее неизвестный факт того, что приёмник GP-270ML компании Icom прекращал измерение скорости, когда она становилась менее 1 узла [8]. В работе [4] было теоретически обосновано уменьшение погрешностей измерения абсолютной скорости с её увеличением. В экспериментах с неподвижным приёмником была получена противоположная зависимость [15]. Поэтому возникла необходимость проведения экспериментов на движущимся судне, которое могло бы перемещаться переменными ходами.
К сожалению, выполнить такой эксперимент в полной мере не удалось. Экспериментальные наблюдениями проводились на боту учебной научно-исследовательской лаборатории (УНИПЛ) “Галс”, принадлежащей кафедре технических средств судовождения МГУ им. адм. . Наблюдения проводились 20.08.07, 27.08.07 и 3.09.07 во время рейсов между водной станции МГУ и бухтой Нарва. Источником абсолютной скорости (SOG) был навигационный приёмник СРНС Навстар GPS GP-37, изготовленный компанией Furuno. Во время рейсов режим осреднения скорости в приёмнике был отключён. Данные от приёмника в виде предложений стандарта NMEA 0183 автоматически записывались на жёсткий диск ноутбука. Модули абсолютной скорости судна (SOG), время, текущие координаты и путевые углы (COG) в ходе последующей предварительной обработки выделялись из предложения NMEA $GPRMC. График изменения SOG во время рейса из Владивостока представлен на рис. 1.
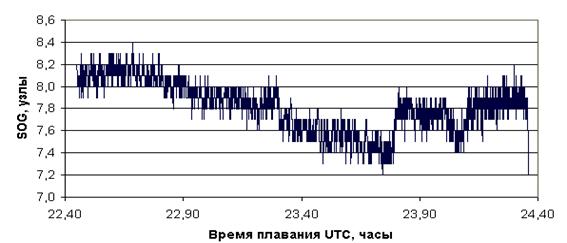
Рис. 1. Изменение SOG в рейсе в б. Нарва 3 сентября 2007 года
На рис. 1 видно как изменялась абсолютная скорость судна в Амурском заливе под действием течений. Размах SOG в этом рейсе составил 1,2 узла.
Затем полученный массив абсолютных скоростей был разбит на одноминутные и двухминутные смежные интервалы. По каждому такому интервалу были рассчитаны средние значения SOG и средние квадратические отклонения (СКО). Задавшись линейной зависимостью СКО от средних величин SOG, были рассчитаны коэффициенты этой регрессии. Корреляционные поля и графики зависимостей представлены на рис. 2. Левая панель рис. 1 соответствует одноминутным интервалам осреднения, а правая – двухминутным интервалам.
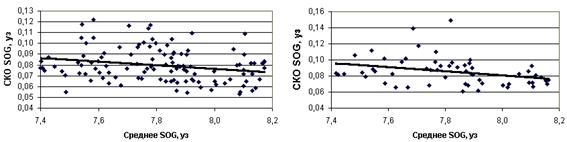
Рис. 2. Зависимость погрешностей SOG от её средней величины
На левой и правой панелях рис. 2 видны отрицательные тренды. Это свидетельствует об отрицательной статистической связи погрешностей (СКО) и величиной абсолютной скорости.
Расчёты коэффициентов линейной регрессии позволили получить следующие аналитические выражения для СКО одноминутных интервалов (![]() ) и двухминутных интервалов (
) и двухминутных интервалов (![]() ).
).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
