

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Расстояние AA1 или AA2 можно вычислить по следующей формуле:
 (1)
(1)
где R – радиус кривизны меридианного эллипса,
a – большая полуось данного референц-эллипсоида (для ПЗ-90 и ПЗ-90.02 a = 6378136 м), e – первый эксцентриситет данного референц-эллипсоида,
e2 = 2f – f2, где f – полярное сжатие, f = 1/F, где F – знаменатель сжатия, φ – геодезическая широта точки M.
Как видно из приведённых выше формул, изменение знаменателей сжатия референц-эллипсоидов приводит к изменению только величин их эксцентриситетов и малых полуосей.
Для того чтобы корректно воспользоваться формулой (1) при расчёте ΔS, необходимо знать значения геодезических широт (φ1, φ2) точки M в системах геодезических координат ПЗ-90 и ПЗ-90.02 соответственно. Величины φ1 и φ2 можно вычислить, зная пространственные декартовы координаты (X, Y, Z) точки M.
Воспользуемся алгоритмом вычисления геодезических широт, изложенным в [2].
 (2)
(2)
где N – радиус кривизны первого вертикала в широте φ,
h – возвышение точки M над поверхностью эллипсоида,

На рис. 1 возвышение h – это расстояние A1M или A2M в зависимости от того, для какого референц-эллипсоида выполняются вычисления геодезической широты φ точки M.
Формула (2) предполагает вычисления широты в ходе итераций. Первое приближение φ выбирается из уравнения
и подставляется в правую часть уравнения. По первому приближению вычисляются φ, N и h, которые также подставляются в правую часть (2).
Кроме итерационных алгоритмов существуют ещё алгоритмы прямого вычисления геодезической широты по известным пространственным координатам. Воспользуемся таким алгоритмом, который изложен в книге [3].



![]()
В приведённых выше формулах буквой b обозначена малая полуось эллипсоида, а буквой e´ – второй эксцентриситет эллипсоида.
Зададимся точкой M возле поверхности Земли с пространственными координатами X = –2903860 м, Y = 3460686 м, Z = 4487362 м, что приблизительно соответствует φ = 45˚N, λ = 130˚E. В ходе расчётов по итерационному алгоритму (2) с разрядностью 50 знаков были получены следующие результаты:
для эллипсоида ПЗ-90 широта точки M φ90 = 44°59´59,9975923˝N;
для эллипсоида ПЗ-90.02 широта точки M φ02 = 44°59´59,9975901˝ N.
То есть, при переходе от референц-эллипсоида ПЗ-90 к ПЗ-90.02 широта точки M изменилась на 0,0000022˝ к югу.
Расчёты геодезических высот по итерационному алгоритму (2) с той же разрядностью дали следующие результаты: h90 = 20,22309 м; h02 = 20,22306 м.
Вычисления геодезических широт и высот с разрядностью 50 знаков по алгоритму [3] позволили получить следующие результаты:
φ90 = 45°N, h90 = 20,2239 м, φ02 = 45°N, h02 = 20,2239 м. То есть, с помощью представленного в книге [3] алгоритма были получены одинаковые результаты. Следовательно, отдельные алгоритмы прямого вычисления геодезических координат, широко применяемые в навигационных приёмниках СРНС Навстар GPS, могут отличаться низкой чувствительностью.
Чтобы вычислить длины дуг AA1 и AA2, воспользуемся приёмом, разработанным [4]. Для этого разложим выражение для R в ряд
 Точность дальнейших вычислений значительно повысится, если вместо степеней синусов этот ряд подставить косинусы кратных углов.
Точность дальнейших вычислений значительно повысится, если вместо степеней синусов этот ряд подставить косинусы кратных углов.



После подстановки ряд примет следующий вид:
![]()
![]()
Если полученный ряд подставить в формулу (1), а затем проинтегрировать почленно, представляя φ в градусной мере, получим:
 (3)
(3)
где 



Рассчитаем вначале коэффициенты A – E для эллипсоидов ПЗ-90 и ПЗ-90.02, а затем воспользуемся формулой (3) для расчётов расстояний от экватора до параллелей полученных ранее широт с помощью итерационного алгоритма (2). Полученные коэффициенты для ПЗ-90 и ПЗ-90.02 помещены в табл. 1.
Таблица 1.
Коэффициенты для расчётов длины дуги меридиана эллипсоидов
ПЗ-90 и ПЗ-90.02
Коэффициент | Коэффициенты ПЗ-90 | Коэффициенты ПЗ-90.02 |
A | ||
B | 16038, | 16038, |
C | 16, | 16, |
D | 0, | 0, |
E | 0, | 0, |
В геодезической системе ПЗ-90 расстояние от экватора до параллели точки М составило 457223 м, а во вновь принятой геодезической системе ПЗ-90.02 оно получилось равным 455176 м. Следовательно, переход от ПЗ-90 к ПЗ-90.02 в широте 45° вызывает линейное смещение к югу на 1,02047 м.
Выполненные расчёты и рассуждения позволяют сформулировать следующие выводы и предложения.
1. Изменение параметров референц-эллипсоида в новой версии системы геодезических координат ПЗ-90.02 не вызывает таких изменений в обсервованных координатах, которые могли бы сказаться на точности определения места судна приёмниками СРНС Глонасс.
2. Так как обнаруженное влияние практически ничтожно (изменение широты составило всего лишь 0,0000022˝), то тез ущерба для практической точности судовождения можно продолжать использовать прежние параметры перехода от WGS-84 к СК-95 и обратно, приведённые в ГОСТ Р [5].
3. Тем не менее, изменение сжатия референц-эллипсоида придётся учитывать в картографии. Планы масштаба 1:5000 и крупнее, составленные в системе геодезических координат ПЗ-90.02, уже должны быть чувствительными к смещению широты к югу по сравнению с прежней системой ПЗ-90.
4. Обнаружена нечувствительность алгоритмов прямого вычисления геодезических координат по прямоугольным пространственным.
5. В программных обеспечениях судовых приёмников СРНС Навстар GPS применяются главным образом алгоритмы прямого преобразования. Крайне важно проделать анализ таких алгоритмов с тем, чтобы оценить их вклад в постоянные погрешности вычисления обсервованных координат.
Литература
1. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ (ред. 5.0), Москва, 2002. – 60 с.
2. , Побединский спутниковая система определения местоположения GPS и её применение в геодезии. – М.: “Картоцентр” – “Геодезиздат”, 1999. – 272 с.
3. Elliot D. Kaplan. Understanding GPS. Principles and Applications. Artech House, Boston, 1996. – 554 p.
4. Каврайский по сфероидической геодезии. Избранные труды, том I, Астрономия и геодезия. Издание Управления начальника Гидрографической службы ВМФ СССР, 1956. С. 141 – 248.
5. Государственный Стандарт Российской Федерации ГОСТ Р . Аппаратура радионавигационная глобальной навигационной спутниковой системы и глобальной системы позиционирования. Системы координат. Методы преобразования координат определяемых точек. –М.: Госстандарт России, ИПК Издательство стандартов, 2001. – 11 с.
Совершенствование расчетно-информационного комплекса «Загрузка» и его самодостаточность в процессе обучения
, ,
МГУ им. адм. , г. Владивосток
В МГУ имени адмирала на кафедре Теории и устройства судов разработаны, постоянно совершенствуются и широко используются в учебном процессе тестирующие и обучающие программы для объективной оценки знаний, умений и навыков курсантов, студентов и специалистов морского флота.
Наибольший опыт накоплен по использованию Расчетно-информационного комплекса (РИК) «ЗАГРУЗКА», который применяется для расчета и контроля посадки, остойчивости, прочности, безопасности плавания на попутном волнении и непотопляемости. РИК «ЗАГРУЗКА» имеет типовое одобрение Российского Морского Регистра Судоходства и Регистра Ллойда. В МГУ комплекс используется как тренажер грузобалластных операций, предназначенный для обучения курсантов судоводительского факультета.
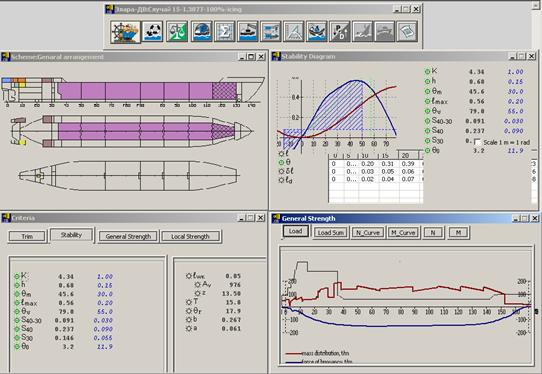
Рис. 1. Общий вид интерфейса РИК «ЗАГРУЗКА»
Лабораторные работы проводятся в двух вариантах: составление оптимального грузового плана по известному количеству запасов и грузу, и корректировка грузового плана несоответствующего требованиям посадки, остойчивости, прочности и непотопляемости. Каждый из вариантов задания прорабатывается не только с разными типами грузов, но и на различных типах судов.
Многовариантность исходных данных позволяет персонифицировать процесс обучения и существенно повысить его качество. Контроль за выполнением каждого задания может производиться как во время проведения занятий, так и после них. Для этого система позволяет сохранить проделанные работы в виде отдельного файла, в котором обязательно указываются идентификационные данные обучающегося и номер задания.
Помимо составления и корректировки грузового плана комплекс имеет возможность моделировать различные ситуации, влияющие на параметры посадки остойчивости и прочности, связанные с погрузкой-разгрузкой, балластировкой, перемещением, подъемом грузов на борту судна и наличием свободных поверхностей жидкостей.
Опыт использования тренажера показал, что от обучающегося не требуется специальных знаний и навыков связанных с работой на вычислительной технике. Программа самодостаточна, информативна, в интерфейсе используются специальные «всплывающие» строки-подсказки, позволяющие быстро ориентироваться в окнах программы.
Работа с РИК «ЗАГРУЗКА» помогает получить навыки решения эксплуатационных задач составления грузового плана и оперативного контроля мореходных качеств судна. Наглядное представление информации на экране, простота диалога и исчерпывающий сервис вспомогательных функций программы делает процесс обучения увлекательным и эффективным. Все данные РИК «ЗАГРУЗКА» сформированы для реальных морских транспортных, промысловых и рыбоперерабатывающих судов Дальневосточного бассейна.
РАБОТА СУДОВОДИТЕЛЯ КАК ОПЕРАТОРА ИНТЕГРИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ
,
Prisco ( Singapore ) Pte. Ltd, г. Находка
Судовая система мониторинга и сигнализации (Centralized Monitoring and Alarm System) предназначена:
– для непрерывного контроля технологических процессов безопасности судна и выполнения его целевых функций;
– для выработки предупреждений о явлениях и ситуаций, требующих вмешательство оператора.
В перечень решаемых задач системы входят:
– постоянное наблюдение с целью обнаружения чрезвычайных событий;
– надзор за состоянием объектов;
– непрерывный контроль работы главных устройств управления судном;
– слежение за функционированием вспомогательных судовых систем и механизмов.
Система мониторинга может иметь самое разнообразное построение. Это зависит от того, имеются ли на судне локальные устройства контроля, диагностики, какие и сколько. При наличии таких локальных устройств система должна обеспечивать возможность управления их данными: включать и выключать сигнализацию, по требованию судоводителя представить подробную информацию о процессе, контролируемом локальным устройством.
Контроль работы главных средств управления
Мониторинг рулевого устройства отслеживает параметры работы гидравлического оборудования, параметры электропитания компонентов рулевого привода, параметры работы системы дистанционного управления рулевым приводом (системы авторулевого), положение руля. В случае выхода из строя основного источника питания (обесточивание судна), установки рулевого привода автоматически подключается питание от аварийного либо другого резервного источника электроэнергии.
Мониторинг главной движительной установки состоит в непрерывном отслеживании параметров процессов работы главного двигателя и его вспомогательного оборудования. Датчики информации обеспечивают контроль работы и диагностики по частоте вращения гребного вала, скорости изменения этой частоты, давления надувочного воздуха, масла, охлаждающей воды, топлива, температуре выхлопных газов и деталей цилиндропоршневой группы, а также по другим параметрам ГДУ. Современные системы мониторинга и сигнализации обеспечивают возможность по требованию просмотреть другие контролируемые величины и имеют «генераторы» рекомендаций. Они на базе текущего прогноза по ходу работы автоматически выдают судоводителям советы о действиях, которые следует предпринять для обеспечения нормальной работы ГДУ. Модуль защиты двигателя автоматически принимает меры, предупреждающие поломку главного двигателя. Это достигается следующим образом:
– введением в действие резервного агрегата и остановкой неисправного;
– изменением режима работы на облегченный;
– остановкой главного двигателя.
В современных ДАУ для диагностики и выработки рекомендаций по обеспечению нормальной работы и восстановления работоспособности судовых систем используются интеллектуальные «открытые» экспертные системы. «Открытость» обеспечивает возможность дополнения базы знаний экспертной системы новыми сведениями о причинах возникающих неполадок и методов их предупреждения.
Мониторинг с целью обнаружения чрезвычайных событий
Целью этого постоянного наблюдения является обнаружение пожара, опасных газов, чрезмерное поступление воду в отсеки, обнаружение других опасных явлений, а также контроль состояния объектов и устройств, препятствующих развитию чрезвычайных ситуаций. По результатам мониторинга вырабатываются предупреждения о контролируемых параметрах к предельным значениям, и производится сигнализация о появлении опасных значений.
Деятельность оператора в системе «Человек – машина»
Не смотря на активные процессы компьютеризации флота по прежнему сохраняется творческая роль человека – оператора как центральной фигуры. Преобладающими способностями человека становятся его информационные функции, то есть функции программирования и контроля управления производственных процессов. Ставится задача оптимального согласования конструктивных возможностей приборов и машин и психологических способностей человека. Наиболее характерным в работе оператора является умения, связанные с хранением и переработкой информации. Информационный поток представляет собой «разрывную» структуру, в которой значение и смысл выступают в роли медиаторов информационных переходов, Этот поток может бесконечно перемешиваться и выдавать на выходе абсолютно новое решение, например: начальная информация – значения и смыслы – промежуточная информация – значения и смыслы – промежуточная информация – значения и смыслы – конечная информация (Рис.1).


начальная промежуточная промежуточная конечная
информация информация информация информация
Рис.1 Информационный поток
Эффективность деятельности судоводителя во многом зависит от оптимального и своевременного принятого решения. Принятие решения судоводителем включает четыре этапа:
− создание субъективного представления о задаче ( прежде всего это оценка неопределенности и риска );
− оценка последствий от альтернатив ( выбор из двух или более решений);
− оценка условий;
− выбор альтернативы при соотнесении возможного решения (требуемых или предписанных действий).
Оптимальность решений и их реализация достигается при полноте информации о каждой альтернативе, в соответствии с конкретным временным моментом или интервалом.
|
Деятельность оператора в системе «человек — машина» состоит из четырех основных этапов:
Прием информации – осуществляется восприятие информации об объекте управления и тех свойствах окружающей среды и системы «человек – машина» в целом, которые важны для решения текущей задачи. Операционально данный этап состоит из обнаружения сигналов, выделения из их совокупности наиболее значимых, их расшифровка и декодирование, составления целостного предварительного представления о состоянии управляемого объекта. На эффективность данного этапа влияют сложность воспринимаемого сигнала, вид и количество индикаторов, организация информационного поля, размеры изображений и их звуко-светотехнические характеристики.
Оценка и переработка информации – производится сопоставлением заданных и текущих режимов работы системы «человек – машина», анализ и обобщение информации, выделяются критические объекты и ситуации. На основании заранее известных критериев важности и срочности определяется очередность обработки информации. Операционально данный этап состоит из запоминания информации, извлечения информации из памяти и т. д. На эффективность этого этапа влияют способы кодирования, степень сложности и объем информации, динамика смены информации.
Принятие решения – принимается решение о необходимых действиях на основе проведенного анализа и оценки информации, а также других известных сведений о целях и условиях работы системы, возможных способов действия, последствий правильных и ошибочных решений. На эффективность данного этапа влияют тип решаемой задачи, число и сложность алгоритма и количество возможных вариантов решения.
Реализация принятого решения – принятое решение приводится в исполнение путем выполнения определенных действий или отдачи соответствующих команд / распоряжений. Операционально данный этап состоит из поиска нужного органа управления, движения руки к органу управления и манипуляций с ним. На эффективность этого этапа влияют число и тип органов управления, их характеристики (размер, форма, и т. д.), особенности рабочего места, характеристики окружающей среды, индивидуальные характеристики оператора.
Объем кратковременной памяти и внимания человека ограничен 5 ± 2 объектами, то есть в фокусе сознания могут удерживаться не более 6, а для тренированного оператора не более 9 смысловых единиц. Анализ информации нередко требует от судоводителя выполнения сложных логических и арифметических действий. Значительная часть принимаемой для переработки информации «уходит» на периферию сознания, тогда как она может быть важной в работе системы «человек-машина». Создается предпосылка к ошибке оператора типа:
НЕ ОБРАТИЛ ВНИМАНИЯ, НЕ ПРИДАЛ ЗНАЧЕНИЯ.
Адекватность и правильность принятия решения зависит от того, насколько точно осуществлен прием информации, насколько правильно произведен ее анализ. При реализации принятого решения вахтенный помощник осуществляет моторные (воздействует на орган управления) и коммуникативные (отдает распоряжения) действия. Однако ведущее значение по-прежнему принадлежит восприятию, вниманию, мышлению оператора, поскольку его основными функциями являются наблюдение и контроль. На этом этапе могут суммироваться все предыдущие допущенные ошибки:
ПЕРЕПУТАЛ СТОРОНЫ СМЕЩЕНИЯ И/ИЛИ ПОВОРОТА «ЗАПАД – ВОСТОК» «ПРАВО – ЛЕВО». ПОТЕРЯЛ КОНТРОЛЬ ЗА ВЫПОЛНЕНИЕМ КОМАНДЫ И/ИЛИ ОКОНЧАНИЕ МАНЕВРА.
Состояние монотонности или «ватного» сознания, возникающие вследствие действий однообразных раздражителей, делает человека не способным принимать и анализировать даже небольшой объем информации. Тоже самое относится и к эмоциональному возбуждению (встревоженность, разозленность) на начало вахты. Создается предпосылка к ошибке оператора типа :
НЕ УВИДЕЛ, НЕ СЛЫШАЛ, НАЖАЛ ДРУГУЮ КНОПКУ.
В качестве примера приведем выполнение операторских функций вахтенного помощника при изменении курса. Информация, которая поступает от репитера гирокомпаса, воспринимается в количестве 457 оптических сигналов. Оператор воспринимает всю совокупность сигналов и выделяет из нее 4 наиболее значимых смысловых единиц (360-градусную шкалу, шкалу десятых долей градуса, стрелку, стороны изменения). Затем расшифровывает и декодирует информацию, в результате получает одну смысловую единицу – курс судна. При работе с радиолокатором и САРП, первичный объем информации может быть меньше – около 445 оптических сигналов, но количество важных смысловых единиц, которые оператор должен выделить, в несколько раз больше (количество целей на экране, элементы их движения, шкала, кратчайшая дистанция и др.). Кроме того, расшифровка и декодирование информации в данном случае представляет собой значительно более сложные процессы.
Соответственно, прием информации с 20 приборов означает обработку последовательно, а в некоторых случаях параллельно, чрезвычайно широкого информационного поля из нескольких тысяч сигналов разного характера и степени сложности. Это обуславливает возникновение множества ошибок типа:
НЕПРАВИЛЬНО СЧИТАЛ ЦЕНУ ДЕЛЕНИЯ, НЕПРАВИЛЬНО ПРОИНТЕРПАЛИРОВАЛ ЗРИТЕЛЬНЫЕ СИГНАЛЫ, НЕ РАЗЛИЧИЛ ЦИФРЫ, ПОСМОТРЕЛ НЕ В ТУ ЯЧЕЙКУ, ЗАБЫЛ
СНЯТЬ ПОКАЗАНИЯ СИГНАЛА ИЛИ ПРИБОРА.
Возникновение информационной перегрузки возможно при накладывании на постоянно действующие факторы еще и тревожные сигналы от системы мониторинга. Как правило, информационная перегрузка характеризуется резкой сменой монотонности и однообразия на противоположное. При резком изменении условий плавания или вахты необходимо заблаговременно определить «зоны риска» возникновения информационной перегрузки у судоводителя и принять соответствующие меры по ее предотвращению.
Еще один пример выполнения операторских функций старшим помощником в процессе грузовых операций. Какие функциональные действия и ограничения накладываются на процедуры грузовых операций? Во-первых, нарушение привычного ритма сна и бодрствования (старший помощник отвечает за весь цикл грузовых операций и не несет ходовую вахту. Во-вторых, длительность – до десятков часов, что обуславливает поддержание должного уровня работоспособности и в свою очередь приводит к выраженному состоянию утомления и нервно-психического напряжения. В-третьих – выполнение разного рода действий – моторные, коммуникативные, интеллектуальные, быстрое переключение с одной процедуры на другую. В-четвертых, насыщенность рассматриваемого периода времени различными событиями. Допуская искусственную самостимуляцию (с помощью кофе, шоколада, сигарет) старший помощник заканчивает выполнение своих обязанностей по грузовым операциям и подготовке судна к выходу в рейс, но на момент выхода судна из порта начинается его ходовая вахта.
Очевиден неблагоприятный прогноз эффективности выполнения им деятельности по управлению судном. Данный пример представляет собой неблагоприятное стечение обстоятельств. Но и разного рода промежуточные варианты (недосыпание, чрезмерное волнение, стресс, напряженность и др.) могут стать причиной неэффективности человека – оператора, усугубляя воздействие фактора информационной перегрузки и повышая вероятность возникновения чрезвычайных ситуаций.
Можно определить алгоритм действий судоводителя – оператора при мониторинге свето-звуковой предупредительной и тревожной сигнализации (Рис.2).
![]()
![]()

 | |
 | |
 | |
| |
 |
Рис.2 Алгоритм действий оператора
Психологические ошибки человека-оператора
1. Наиболее вероятные источники ошибок:
1.1 Индивидуальные особенности:
− способность к реакции;
− готовность к реакции;
− мотивация реакции,
1.2 Групповое давление:
− степень внушаемости;
− устойчивость самооценки;
− уровень самоуважения;
− тревожность;
− уважение окружающих;
− степень сплоченности группы;
− положение в группе.
1.3 Ошибки наблюдателя:
− сам наблюдатель;
− наблюдаемый объект или событие;
− инструмент наблюдения;
− окружение, в котором происходит наблюдение.
2. Цепь ошибок
AMDIGUITY – неясность, неопределенность.
Место положение судна по радару и GPS не согласуется; показания эхолота не совпадают с данными карты; мнения двух членов состава вахты на мостике по тому или иному действию расходятся.
DISTRACTION – Отвлечение внимания, рассеянность.
Человек все свое внимание обращает только на одно обстоятельство, забыв об остальном. Это может быть вследствие чрезмерной загруженности, стресса или переутомления, экстремальных обстоятельств или, что чаще всего по вероятности невнимание к деталям.
INADEQUACY AND CONFUSION – несоответствие и замешательство.
Как результат недостаточного опыта. Человек чувствует, что что-то не так и не знает, что может произойти. Последствия – потеря контроля над ситуацией.
COMMUNICATION BREAKDOWN - нарушение связи.
Плохая связь как внутренняя, так и внешняя - показатель того, что есть риск потери контроля ситуации. Внутренняя – излишний шум или лишние люди на мостике, языковые трудности, Различные методы общения. Внешние – языковые трудности или простое непонимание.
INPROPER CONN OR LOOKOUT – Неточное ведение исполнительной прокладки или ненадлежащее наблюдение.
NONCOMPLIANCT WITH PLAN – невыполнение плана.
Отступление от плана может быть вследствие неточностей исполнительной прокладки или ошибок в управлении, либо вызвано обстоятельствами.
PROCEDURAL VIOLATION – Нарушение процедуры (изменение порядка действий).
Неоправданное отклонение от ясно обозначенной и понятной процедуры. Например, нарушение последовательности при выполнении чек-листа, нарушение МППСС, в системе разделения движения (выбранный неверный путь или не знание истинного места судна).
ЛИТЕРАТУРА
1. , . Информационная перегрузка как фактор аварийности.
2. . Когнитивная сфера профессионалов экстремальных профессий.
3. . Психологический анализ принятия решения судоводителем.
4. . Основные психологические характеристики, обуславливающие эффективность деятельности морских специалистов.
В МОРЕ – БЕЗ СЛУЧАЙНОСТЕЙ
,
Представительство СК «Инвестфлот», г. Владивостоке
В безопасной эксплуатации морских судов заинтересован весь спектр участников торгового мореплавания: судовладельцы, отправители груза, фрахтователи, получатели, страховые компании, а также федеральный орган исполнительной власти в области транспорта – Министерство Транспорта Российской Федерации. Несмотря на все усилия вышеназванных организаций, полностью избежать аварийных случаев при перевозке грузов морем весьма затруднительно, но сократить их до минимума - достижимая задача. Обеспечение безопасности мореплавания, включающее сохранение человеческой жизни и здоровья членов экипажей и пассажиров судов, сохранность самих судов и перевозимых ими грузов, предотвращение ущерба морской среде, является заботой государственной власти.
Важную роль в обеспечении высоких стандартов безопасности играет Российский Морской Регистр Судоходства ведущий технический надзор за постройкой судов и их эксплуатацией. Не менее значимую роль занимает государственный портовый контроль осуществляемый службой капитана морского порта, обеспечивающий безопасность мореплавания как путем контроля: пригодности судна к плаванию, правильности загрузки, технического оснащения судов; так и проверками соответствия требованиям нормативных документов профессионализма и компетентности экипажа.
Все мы понимаем, что море – зона повышенной опасности, где может случиться всякое. Морское страхование сегодня - является важнейшим инструментом для полного урегулирования убытка и его возмещения. Морское страхование имеет давнюю историю и сложившиеся традиции.
В настоящее время можно считать, что за 15 лет отечественный рынок страхования морских рисков уже преодолел наиболее сложный этап становления и перешел в стадию развития, а в некоторых регионах достиг значительных успехов. В первую очередь в число таких «передовиков» входят восточные рубежи России, чья жизнь неразрывно связана с морем. А поэтому можно по праву считать, что сегодня именно здесь – на Дальнем Востоке - образовался центр российского морского страхования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
