

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для построения искомых характеристик, которые представляют собой прямые линии, достаточно определить координаты двух точек: номинального режима и холостого хода
1. Для точки номинального режима определяем номинальную угловую скорость
![]()
номинальный момент
![]()
номинальное сопротивление ДПТ

2. Далее по приближенной формуле (3.23) находим сопротивление якорной цепи
![]()
3. Используя (34), определяем значение ![]()
![]()
4. Скорость идеального холостого хода согласно (3.6а) равна
![]()
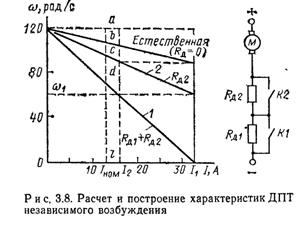
5. По координатам точек холостого хода (w0, 0) и номинального режима (wном, Iном) на рис 38 построена естественная электромеханическая характеристика ДПТ независимого возбуждения Естественная механическая характеристика также может быть построена по этим же двум точкам
Пример 3.2. Расчитать и построить для ДПТ (см. пример 3 1) пусковую диаграмму при использовании двух ступеней пускового резистора.
Построение пусковой диаграммы ДПТ осуществляется в следующем порядке.
1. Рассчитывается максимально допустимый при пуске ток I1=Iдоп. Для рассматриваемого примера примем
![]()
2. Определяется ток переключения I2, значение которого можно получить двумя путями;
а) подбором с таким расчетом, чтобы число искусственных характеристик равнялось двум, а ток в переходном процессе не превосходил Iдоп;
б) расчетом с помощью следующей формулы, которая приводится без вывода:
![]() (3.24)
(3.24)
где т – число заданных ступеней пускового резистора.
Методом подбора из рис. 3.8 находим I2=16 А. Отметим, что если пуск ДПТ осуществляется под нагрузкой, то ток I2 должен на 10–20 % превосходить ток нагрузки Iс, т. е. должно соблюдаться равенство:
3. С помощью метода отрезков определяем сопротивление ступеней пускового резистора
Искусственная характеристика I на рис. 3.8 соответствует наличию в цепи якоря обеих ступеней пускового резистора Rд1+Rд2, а характеристика 2–второй ступени Rд2. На рис. 3.8 изображена также схема якорной цепи двигателя при реализации этой пусковой диаграммы.
3.3. РЕГУЛИРОВАНИЕ СКОРОСТИ ДПТ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ ИЗМЕНЕНИЕМ МАГНИТНОГО ПОТОКА
Искусственные характеристики ДПТ независимого возбуждения, получаемые путем изменения магнитного потока ДПТ, используются главным образом для регулирования скорости. Этот способ находит широкое применение в автоматизированном электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения ДПТ.
Регулирование магнитного потока при использовании этого способа производится только в сторону его уменьшения (ослабления) по сравнению с номинальным за счет уменьшения тока возбуждения IВ. Причины этого кроются в следующих двух обстоятельствах.
1. Увеличение магнитного потока должно вызываться соответствующим увеличением тока возбуждения ДПТ. Однако поскольку номинальный магнитный поток создается номинальным током возбуждения, то увеличение тока возбуждения выше номинального вызывает дополнительный нагрев ДПТ, что недопустимо.
2. Двигатель рассчитан и сконструирован таким образом, что его магнитная система близка к насыщению.
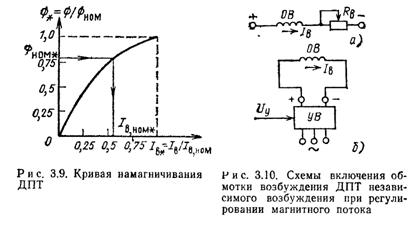
Это обстоятельство отражается в расположении номинальной точки ![]() на кривой намагничивания ДПТ
на кривой намагничивания ДПТ ![]() (рис. 3.9) в области насыщения. По этой причине стремление увеличить магнитный поток не даст заметного практического результата.
(рис. 3.9) в области насыщения. По этой причине стремление увеличить магнитный поток не даст заметного практического результата.
Возможные схемы включения обмотки возбуждения ДПТ независимого возбуждения приведены на рис. 3.10. Схема рис. 3.10, а предусматривает включение в цепь возбуждения добавочного резистора Rв, за счет чего ток возбуждения Iв и тем самым магнитный поток могут быть уменьшены. В схеме рис. 3.10, б для изменения тока возбуждения используется управляемый выпрямитель УВ, выходное напряжение которого регулируется по сигналу управления Uy. Эта схема более экономична и применяется для регулирования тока возбуждения мощных ДПТ.
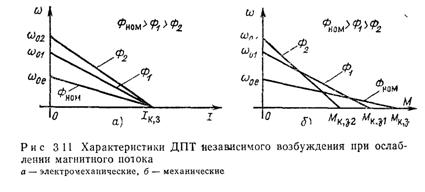
Семейство искусственных характеристик ДПТ w(I) и w(М) получим, рассмотрев изменение координат точек холостого хода и короткого замыкания при варьировании магнитного потока. В соответствии с (3.6а) уменьшение магнитного потока приведет к увеличению скорости идеального холостого хода w0.
Ток короткого замыкания Iк, з=U/Rя от магнитного потока не зависит и будет оставаться неизменным. Другими словами, все искусственные электромеханические характеристики проходят через одну и ту же точку на оси тока с координатами (0; Iк, з).
Все сказанное позволяет представить электромеханические характеристики ДПТ независимого возбуждения при уменьшении магнитного потока совокупностью прямых линий, приведенных на рис. 3.11, а. Момент короткого замыкания в соответствии с (3.3)
 (3.25)
(3.25)
Так как Iк, з=const, то при уменьшении магнитного потока пропорционально ему уменьшается и момент короткого замыкания. В результате механические характеристики имеют вид прямых, показанных на рис. 3.11, б. Диапазон регулирования скорости при данном способе равен 3–4. Направление регулирования скорости – вверх от естественной характеристики. Плавность регулирования скорости определяется плавностью регулирования тока возбуждения. Стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.
Допустимую нагрузку ДПТ при его работе на искусственных характеристиках определим по обычному правилу, полагая в (3.3) I=Iном,
![]() (3.26)
(3.26)
где Фи– магнитный поток на искусственной характеристике.
Так как при данном способе регулирования Фи<Фном, то и Мдоп<Мном, т. е. ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Для определения того, какую именно нагрузку он может нести, запишем выражение для ЭДС якоря на естественной и искусственной характеристиках при I=Iнoм
![]()
Так как Uном–IномRя=const, то Ее=Еи и справедливо следующее соотношение:
![]() (3.27)
(3.27)
где wи – скорость на искусственной характеристике при I2=Iном.
Подставляя (3.27) в (3.26), получаем после несложных преобразований
 (3.28)
(3.28)
Таким образом, при работе ДПТ на искусственных характеристиках он может быть натружен на свою номинальную мощность. Объяснение этого заключается в том, что хотя момент нагрузки при уменьшении магнитного потока должен быть снижен, одновременно повышается скорость ДПТ, а их произведение, определяющее механическую мощность, остается неизменным и численно равным номинальной мощности ДПТ. Таким образом, этим способом осуществляется регулирование при постоянной мощности.
Данный способ нашел широкое применение в электроприводе металлорежущих станков, прокатных станов, наматывающих устройств. Он также часто используется в комбинации с другими способами регулирования скорости.
Пример 3.3. Определить магнитный поток, ток возбуждения и сопротивление добавочного резистора Rв в схеме рис. 3.10, а (для ДПТ, указанного в примере 3 1), при которых скорость идеального холостого хода w0и на искусственной характеристике будет на 25 % превышать скорость идеального холостого хода w0е на естественной характеристике.
При решении задачи воспользуемся формулой  , из которой следует!
, из которой следует!
![]()
Для данного значения Фи* с помощью кривой рис 3 9 находим Iв, и*= Iв, и/Iв. ном=0,58 и далее Iв, и=0,58×0,73=0,42 А. Сопротивление добавочного резистора определяем по формуле
![]()
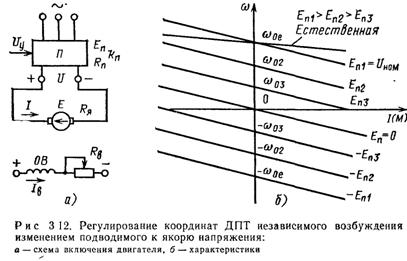
3.4. РЕГУЛИРОВАНИЕ КООРДИНАТ ДПТ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ ИЗМЕНЕНИЕМ ПОДВОДИМОГО К ЯКОРЮ НАПРЯЖЕНИЯ
Регулирование координат данным способом осуществляется по схеме рис. 3.12, а, в которой якорь ДПТ питается от управляемого источника постоянного тока (преобразователя) Л, образуя систему преобразователь–двигатель (П–Д). В качестве преобразователя обычно используются: электромашинные, электромагнитные, ионные и полупроводниковые преобразователи. Обмотка возбуждения 0В питается от отдельного источника постоянного тока, например от неуправляемого выпрямителя.
Преобразователь П характеризуется в общем случае ЭДС Eп, внутренним сопротивлением Rп и коэффициентом усиления ![]() , где Uy–входной управляющий сигнал. Напряжение на выходе преобразователя в разомкнутой схеме рис. 3.12, а вследствие наличия внутреннего сопротивления зависит от тока I, т. е.
, где Uy–входной управляющий сигнал. Напряжение на выходе преобразователя в разомкнутой схеме рис. 3.12, а вследствие наличия внутреннего сопротивления зависит от тока I, т. е.
 . (3.29)
. (3.29)
С учетом (3.29) формулы (3.4) и (3.5) для электромеханической и механической характеристик ДПТ независимого возбуждения в системе П–Д принимают вид
 (3.30)
(3.30)
 (3.31)
(3.31)
Из (3.30) и (3.31) видно, что при изменении ЕП пропорционально изменяется скорость идеального холостого хода w0 на искусственных характеристиках, а сами характеристики имеют больший наклон из-за наличия сопротивления RП выражении для перепада скорости Dw. Эти положения нашли свое отражение в характеристиках рис, 3.12, б, где для сравнения приведена также естественная характеристика ДПТ независимого воздействия при питании от источника бесконечно большой мощности (или, что то же самое, от источника с нулевым внутренним сопротивлением). Характеристики располагаются во всех четырех квадрантах параллельно друг другу; при ЕП4=0 ДПТ работает в режиме динамического торможения.
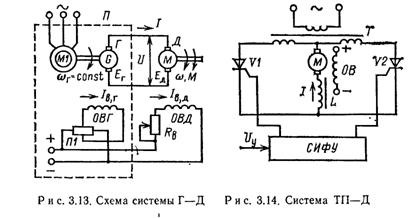
Характеристики рис. 3.12, б соответствуют использованию в качестве преобразователя П электрических машин. Схема такой системы, получившей название система генератор–двигатель (Г–Д), изображена на рис. 3.13. В этой системе якорь ДПТ непосредственно присоединяется к якорю генератора Г, который вместе с приводным двигателем M1 образует электромашинный преобразователь П электрической энергии трехфазного переменного тока в энергию постоянного тока.
Регулирование напряжения на якоре ДПТ происходит за счет изменения тока возбуждения генератор IВ, Г, при регулировании которого с помощью потенциометра П1 изменяется ЭДС Ег и соответственно напряжение U. Регулирование напряжения в этой системе может сочетаться с воздействием на магнитный поток ДПТ, что обеспечивает двухзонное регулирование скорости.
Основными достоинствами системы Г–Д являются большой диапазон и плавность регулирования скорости ДПТ, высокая жесткость и линейность характеристик, возможность получения всех энергетических режимов работы ДПТ, в том числе и рекуперативного торможения. В тоже время для этой системы характерны такие недостатки, как утроенная установленная мощность электрических машин, низкий КПД, инерционность процесса регулирования, шум при работе.
Основным типом преобразователей, применяемых в настоящее время в регулируемом электроприводе постоянного тока, являются полупроводниковые статические преобразователи, и в первую очередь тиристорные преобразователи. Они представляют собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схеме. Определенные перспективы развития этого вида электропривода связаны с использованием транзисторных преобразователей. В настоящее время силовые транзисторы выпускаются на напряжение до 1500 В и токи до 40 А, что делает возможным создание электроприводов мощностью до нескольких десятков киловатт. Вместе с тем их стоимость по сравнению со стоимостью тиристоров заметно выше, а выпуск ограничен, что препятствует их широкому использованию в автоматизированном электроприводе.
Принцип действия, свойства и характеристики системы тиристорный преобразователь–двигатель (ТП–Д) рассмотрим на примере схемы рис. 3.14, где в качестве преобразователя использован однофазный двухполупериодный нереверсивный выпрямитель, собранный по нулевой схеме.
Преобразователь включает в себя согласующий трансформатор Т, имеющий две вторичные обмотки, два тиристора V1 и V2 и систему импульсно-фазового управления тиристорами (СИФУ). Преобразователь обеспечивает регулирование напряжения U на ДПТ за счет изменения среднего значения ЭДС преобразователя ЕП. Это достигается, в свою очередь, за счет регулирования угла управления тиристоров a, представляющего собой угол задержки открытия тиристоров V1 и V2 относительно момента их естественного открытия. Напомним, что моментом естественного открытия управляемого вентиля (тиристора) является момент, когда потенциал анода становится выше потенциала катода.
Когда a=0, т. е. тиристоры V1 и V2 получают импульсы управления от СИФУ в момент их естественного открытия, преобразователь осуществляет двухполупериодное выпрямление и к ДПТ прикладывается полное напряжение.
Если теперь с помощью СИФУ осуществлять подачу им
пульсов управления не в момент естественного открытия тиристоров V1 и V2, а со сдвигом на угол a¹0, то ЭДС преобразователя снизится и этому случаю будет соответствовать уже меньшее среднее напряжение, подводимое к ДПТ.
Зависимость среднего значения ЭДС преобразователя от угла управления тиристорами а имеет вид
 , (3.32)
, (3.32)
где т–число фаз; Етах–амплитудное значение ЭДС преобразователя; Еcp0–ЭДС преобразователя при a=0,
Ввиду пульсирующего характера ЭДС преобразователя ток в цепи якоря ДПТ также является пульсирующим. Такой характер тока оказывает вредное влияние на работу ДПТ, приводя к ухудшению условий работы его коллектора, дополнительным потерям энергии и нагреву. Для уменьшения пульсаций тока в цепь якоря обычно включается сглаживающий реактор L. Другим средством снижения пульсаций является использование многофазных схем выпрямления.
Уравнения электромеханической и механической характеристик ДПТ, питаемого от вентильного преобразователя, имеют вид
![]() (3.33)
(3.33)
![]() (3.34)
(3.34)
где  эквивалентное сопротивление преобразователя; xt, Rt–соответственно приведенные ко вторичной обмотке индуктивное сопротивление рассеяния и активное сопротивление обмоток трансформатора; RL – активное сопротивление сглаживающего реактора L.
эквивалентное сопротивление преобразователя; xt, Rt–соответственно приведенные ко вторичной обмотке индуктивное сопротивление рассеяния и активное сопротивление обмоток трансформатора; RL – активное сопротивление сглаживающего реактора L.
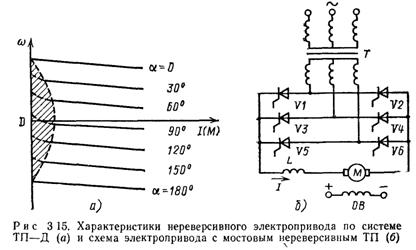
Характеристики, соответствующие (3.33) и (3.34), приведены на рис. 3.15, а. Их особенностью является наличие области прерывистых токов, выделенной на рисунке пунктирной линией и заштрихованной. В этой области имеет место заметное изменение жесткости характеристик, вследствие чего характеристики в целом оказываются нелинейными. Вследствие односторонней проводимости преобразователя характеристики располагаются только в I и IV квадрантах. Меньшим углам управления a соответствует более высокая скорость ДПТ; при a=p/2 ЕП=0 и ДПТ работает в режиме динамического торможения.
На рис. 3.15, б приведена схема электропривода с трехфазным тиристорным преобразователем, собранным по мостовой схеме. Характеристики ДПТ при использовании этого типа выпрямителя аналогичны показанным на рис. 3.15, а. Вместе с тем пульсации тока в этой схеме электропривода меньше, чем в схеме рис. 3.14.
Для получения характеристик ДПТ, располагаемых во всех четырех квадрантах, используются реверсивные выпрямители, которые состоят из двух комплектов нереверсивных выпрямителей. На рис. 3.16, а–г показаны четыре схемы с реверсивными выпрямителями.
Отметим, что работа ДПТ в четырех квадрантах может быть осуществлена и с помощью нереверсивного однокомплектного преобразователя. Для этого должно обеспечиваться изменение направления тока возбуждения двигателя.
При управлении реверсивными вентильными преобразователями используются два основных принципа управления комплектами вентилей: совместное и раздельное. Так как использование того или иного способа управления комплектами сказывается на виде характеристик электропривода и его свойствах, остановимся подробнее на особенностях каждого из них.
Совместное управление предусматривает подачу от СИФУ импульсов управления одновременно на вентили обоих комплектов.

При этом за счет сдвига между импульсами управления двух групп, близкого к л, одна из групп работает в выпрямительном, а другая – в инверторном режимах. Между средними значениями ЭДС выпрямителя Еcp,в и инвертора Еcp,и соблюдается соотношение Еcp,и³Еcp,в, однако за счет разности мгновенных значений ЭДС между комплектами протекают уравнительные токи. Для их ограничения в схемах рис. 3.16 предусмотрены уравнительные реакторы L1–L4.
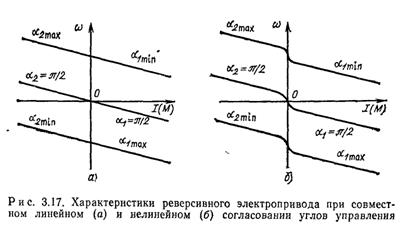
Вид характеристик ДПТ зависит от способа согласования углов управления двумя комплектами вентилей. При линейном согласовании сумма углов выпрямителя a1 и инвертора a2 поддерживается равной p, характеристики линейны и аналогичны характеристикам системы Г–Д. Вид этих характеристик показан на рис. 3.17, а.
Для уменьшения уравнительных токов в ряде случаев используется нелинейное согласование, при котором сумма углов a1 и a2 несколько отличается от p. В этом случае имеет место заметное увеличение скорости ДПТ при переходе от двигательного режима к генераторному, что и отражено в характеристиках рис. 3.17, б. Нелинейное согласование в силу этого обстоятельства применяется относительно редко.
Раздельное управление используется для полного исключения уравнительных токов между комплектами реверсивного преобразователя. Сущность его состоит в том, что импульсы управления подаются только на один из комплектов, который должен в данный момент работать. На второй комплект импульсы не подаются, и он не работает, «закрыт».
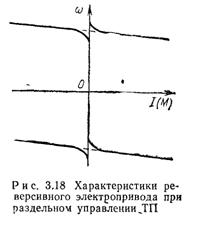
Управление преобразователем осуществляется при этом принципе с помощью специального логического переключающего устройства (ЛПУ). Это устройство, осуществляя контроль за током преобразователя, обеспечивает в функции входного сигнала включение в работу и выключение комплектов с некоторой небольшой паузой в 5–10 мс. Вследствие этого при переходе ДПТ из одного энергетического режима в другой вблизи оси скорости имеет место режим прерывистых токов, что отражается на характеристиках ДПТ, показанных на рис. 3.18.
В заключение остановимся на основных свойствах системы ТП–Д.
К достоинствам рассматриваемой системы относятся:
1. Плавность и значительный диапазон регулирования скорости (до 10 и более).
2. Большая жесткость получаемых искусственных характеристик.
3. Высокий КПД электропривода, определяемый высокими КПД трансформаторов (0,93–0,98) и управляемого выпрямителя (0,9–0,92).
4. Уменьшение количества электрических машин.
5. Бесшумность в работе, простота в обслуживании *и эксплуатации.
Наряду со значительными достоинствами системе ТП–Д присущи следующие недостатки:
1. Преобразователь имеет одностороннюю проводимость. Для получения характеристик ДПТ во всех четырех квадрантах требуется использовать реверсивный двухкомплектный преобразователь.
2. Напряжение на выводах ДПТ и его ток имеют пульсирующий характер, что ухудшает условия его работы. Для сглаживания пульсаций тока в большинстве случаев необходимо применять сглаживающий реактор (см. схемы рис. 3.14 и 3.16) или многофазные схемы выпрямления.
3. Имеет место режим прерывистых токов, при котором резко падает жесткость характеристик, причем последние становятся нелинейными.
4. С ростом диапазона регулирования скорости снижается коэффициент мощности cosj электропривода, определяемый для системы ТП–Д по формуле
![]() .
.
5. Вентильный электропривод вносит искажения в форму тока и напряжения источника питания.
6. Тиристорные преобразователи обладают невысокой помехозащищенностью и малой перегрузочной способностью по току и напряжению.
Несмотря на отмеченные недостатки, система ТП–Д является в настоящее время основным видом регулируемого электропривода постоянного тока и широко применяется для привода таких ответственных рабочих машин как прокатные станы, металлорежущие станки, экскаваторы и т. д.
3.5. ФОРМИРОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА В ЗАМКНУТОЙ СИСТЕМЕ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ
Характеристики разомкнутой системы П–Д показанные на рис. 3.15, 3.17 и 3.18, имеют относительно невысокую жесткость из-за влияния внутреннего сопротивления преобразователя RП. Для получения значительных диапазонов регулирования скорости (несколько десятков или сотен) требуется иметь более жесткие характеристики, которые можно получить лишь в замкнутой системе П–Д. Кроме того, характеристики разомкнутой системы не обеспечивают регулирования или ограничения тока и момента что также требует перехода к замкнутой системе П–Д. Рассмотрим замкнутые системы регулирования скорости, тока и момента с использованием различных обратных связей.
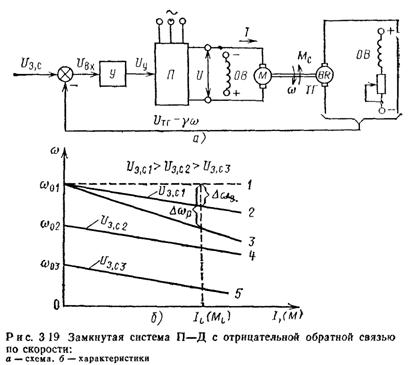
а) Замкнутая система П–Д с отрицательной обратной связью по скорости ДПТ
Структурная схема замкнутой системы с жесткой отрицательной обратной связью по скорости ДПТ показана на рис. 3.19, а. Ее основу составляет разомкнутая схема ПД. На валу ДПТ находится датчик скорости – тахогенератор ТГ (BR), выходное напряжение которого Uтг, пропорциональное скорости ДПТ w, является сигналом обратной связи.
Коэффициент пропорциональности g носит название коэффициента обратной связи по скорости и определяется данными тахогенератора.
Сигнал обратной связи Uтг=Uо, с сравнивается с задающим сигналом скорости Uз, с, и их разность в виде сигнала рассогласования (ошибки) Uвх. подается на вход дополнительного усилителя У, который с коэффициентом ky усиливает сигнал рассогласования Uвх и подает его в виде сигнала управления Uy на вход преобразователя П.
В целях получения формул для характеристик ДПТ в замкнутой системе воспользуемся выражениями (3.30) и (3.31) характеристик разомкнутой системы, а также следующими соотношениями:
![]() (3.35)
(3.35)
![]() (3.36)
(3.36)
Заменяя в (3.30) и (3.31) последовательно Uy на его выражение из (3.36) и далее Uвх, на его выражение из (3.35), после несложных преобразований получаем следующие формулы для характеристик ДПТ в замкнутой системе:
![]() (3.37)
(3.37)
![]() (3.38)
(3.38)
где с=kФном; ![]() –общий коэффициент усиления системы.
–общий коэффициент усиления системы.
Для анализа жесткости получаемых характеристик сопоставим перепады скорости в разомкнутой Dwр и замкнутой Dwз системах при одном и том же токе или моменте. Согласно (3.30), (3.31), (3.37) и (3.38) имеем
![]() (3.39)
(3.39)
![]() (3.40)
(3.40)
Так как kc>0, то всегда Dwз<Dwр, т. е. жесткость получаемых характеристик в замкнутой системе больше жесткости характеристик в разомкнутой системе. Это показано на рис. 3.19, б, где для сравнения приведены характеристики ДПТ в разомкнутой (прямая 3) и замкнутой (прямая 2) системах. На этом же рисунке приведены характеристики замкнутой системы при меньших значениях задающего сигнала Uз, с (прямые 4 и 5), которые располагаются параллельно характеристике 2.
Для нахождения предельной по жесткости характеристики будем увеличивать коэффициент усиления системы kс. Из (3.40) видно, что при kс®¥ Dwз®0, т. е. в пределе в данной замкнутой системе может быть получена абсолютно жесткая характеристика. Эта характеристика изображена на рис. 3.19, б в виде штриховой линии 1.
Отметим, что абсолютно жесткая механическая характеристика на практике не реализуется из-за существенного ухудшения при этом динамики электропривода. Предельные коэффициенты усиления и обратных связей ограничиваются по условиям получения заданных динамических свойств электропривода.
Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что ДПТ работает в установившемся режиме с некоторой скоростью и по каким-то причинам увеличился момент нагрузки Мс. Так как развиваемый ДПТ момент стал меньше момента нагрузки, его скорость начнет снижаться и соответственно будет снижаться сигнал обратной связи по скорости Uтг. Это, в свою очередь, согласно (3.35) вызовет увеличение сигналов рассогласования Uвх и управления Uу и приведет к повышению ЭДС преобразователя, а следовательно, и скорости ДПТ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
