

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1 | I* | 0,4 | 0,8 | 1,2 | 1,6 | 2 |
2 | 0,3 | 0,8 | 1,25 | 1,7 | 2,38 | |
3 | w* | 2,1 | 1,2 | 0,9 | 0,7 | 0,6 |
4 | w=w* wном | 210 | 120 | 90 | 70 | 60 |
5 | M= M* Mном | 9 | 24 | 36 | 48 | 60 |
6 | I =I* Iном | 7,6 | 15,2 | 22,8 | 30,4 | 38 |
Первые три строки таблицы заполняются с помощью характеристик рис. 3.72. Данные строк 4 – 6 получаются умножением относительных значений величин на номинальные значения соответствующих координат ДПТ. По данным строк 4 и 6 таблицы на рис. 3.73, а построена естественная электромеханическая, а по данным строк 4 и 5 – естественная механическая характеристики ДПТ (рис. 3.73, б).


3.16. РЕГУЛИРОВАНИЕ СКОРОСТИ, ТОКА И МОМЕНТА ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ С ПОМОЩЬЮ РЕЗИСТОРОВ В ЦЕПИ ЯКОРЯ
Схема для реализации этого способа регулирования соответствует рис. 3.70, а, а искусственные характеристики описываются выражениями (3.163) и (3.164).
Для построения семейства реостатных характеристик отметим следующее:
1. При I→0, М→0 Ф→0, w→∞, т. е. для всех реостатных характеристик ось скорости является вертикальной асимптотой.
2. При фиксированных токе и моменте увеличение Rд ведет к снижению скорости.
Семейства искусственных реостатных характеристик ДПТ последовательного возбуждения представлены на рис. 3.74, а, б. Эти характеристики используются для регулирования скорости, тока и момента ДПТ последовательного возбуждения в установившемся и переходном режимах Регулирование координат этим способом характеризуется такими же количественными и качественными показателями, что и для ДПТ независимого возбуждения (см. § 32).
Для построения реостатных характеристик при известном Rд, удобно пользоваться следующим методом.
Запишем уравнения естественной и реостатной электромеханических характеристик в следующем виде:
![]() (3.170)
(3.170)
![]() (3.171)
(3.171)
Найдем отношение скоростей ДПТ последовательного возбуждения на естественной wei и искусственной wиi характеристиках при фиксированном токе Ii, и выразим с его помощью скорость wиi как
![]() (3.172)
(3.172)
Порядок построения реостатных характеристик следующий:
1. Задаемся рядом значений тока ДПТ I1, I2… (см. рис. 3.74, а);
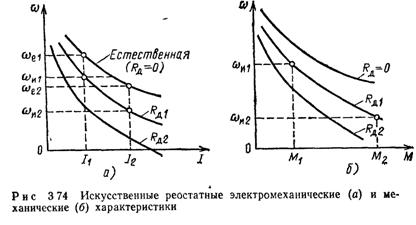
2. По имеющейся естественной электромеханической характеристике для этих значений тока определяются скорости we1, we2…
3. По (3.172) для данного Rд1 рассчитываются скорости wи1, wи2... и строится электромеханическая реостатная характеристика.
4. Для построения реостатной механической характеристики используются универсальные характеристики рис. 3.72, с помощью которых для токов I1, I2… определяются моменты М1, М2... Далее на плоскости (w, М) (см. рис. 3.74,6) наносятся точки с координатами (wи1, M1), (wи2, М2)… и по ним строится характеристика.
Отметим, что необходимые для расчета значения Rя и Ro,в могут быть найдены по справочным данным, экспериментально или по следующей приближенной формуле:
![]() (3.173)
(3.173)
Обратная задача, когда по заданной искусственной характеристике ДПТ или по отдельной ее точке находится соответствующее сопротивление резистора Rд, может быть решена двумя путями.
Первый из них – аналитический – предусматривает использование выражения (3.171). Если выразить из него Rд как искомую величину, то может быть получено следующее соотношение:
 (3.174)
(3.174)
Если известны координаты (wи,i, Ii) хотя бы одной точки заданной реостатной характеристики, то, определяя для тока Ii скорость wei на естественной характеристике, по (3.174) рассчитывается Rд.
В том случае, когда задана механическая реостатная характеристика или одна ее точка с координатами (wиi, Мi,), вначале с помощью универсальных характеристик (3.72) по моменту Mi определяется ток, а затем повторяется вышеизложенный порядок расчета
Второй, графоаналитический способ расчета Rд рассмотрим на примере построения пусковой диаграммы для ДПТ последовательного возбуждения.
Пример 3.5. Для ДПТ последовательного возбуждения, технические данные которого приведены в примере 3.4, рассчитать и построить пусковую диаграмму при пуске в две ступени при моменте нагрузки Mс=25 Н×м.
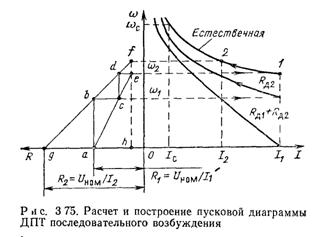
Построение пусковой диаграммы иллюстрирует рис. 3.75, а расчет ее проводится в следующем порядке:
1. В первом квадранте строим естественную характеристику ДПТ w(I).
2. Задаемся максимальным током при пуске Il=2,5Iнoм=2,5×19=47,5 А, током переключения I2=1,2Ic=1,2×15,8=19 А и проводим вертикальные линии, соответствующие этим токам, до пересечения с естественной характеристикой.
3 По (3.173) определяем Rя+Rо, в=0,75(1–0,89)220/19=0,96 Ом. Во втором квадранте проводим вертикальную линию hf на расстоянии Rя+Rо, в=0,96 Ом от начала координат.
4. Проводим через точки 1 и 2 горизонтальные прямые до пересечения с линией hf в точках е и f.
5. Откладываем от начала координат отрезки 0a=R1=220/47,5=4,6 Ом и 0g=R2=220/19=11,6 Ом
6. Соединяем точки а и е, g и f и получаем две прямые, которые отражают линейную зависимость между скоростью ДПТ и сопротивлением якорной цепи при неизменном токе якоря. Последнее следует из выражения w= (Uном–IR)/(kФ)=A–BR, где B=const при I=const.
7. Через точку а проводим вертикальную линию до пересечения с прямой gf в точке b, затем через точку b проводим горизонтальную линию до пересечения с прямой ае в точке с. Аналогично строим отрезки cd и de.
Из построения следует, что отрезок ос соответствует первой ступени пускового резистора Rд1, а отрезок de – второй ступени Rд2.
Действительно, в момент пуска (w=0) ток в якоре I1=47,5 A, a сопротивление всей якорной цепи R1=Uном/I1=Rя+Rо, в+Rд1+Rд2=4,6 Ом. При разгоне ДПТ до скорости w1 ток в якоре снижается до I2. Происходит закорачивание первой ступени пускового резистора Rд1, ток вновь возрастает до значения I1, но ДПТ продолжает разбег уже по другой реостатной характеристике. При скорости w2 закорачивается вторая ступень Rд2 и ДПТ выходит на естественную характеристику.
Построение диаграммы считается правильным в том случае, когда отрезок de будет находиться на горизонтальной линии, проходящей через точку 1. Если это не произойдет, то построение следует повторить, варьируя токи I1 и I2.
Отметим, что построение реостатных характеристик на рис. 3.75 выполняется изложенным выше способом
3.17. РЕГУЛИРОВАНИЕ КООРДИНАТ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ ИЗМЕНЕНИЕМ МАГНИТНОГО ПОТОКА И НАПРЯЖЕНИЯ
Изменение магнитного потока используется главным образом для регулирования скорости ДПТ последовательного возбуждения. Схема, в которой осуществляется регулирование этим способом, приведена на рис. 3.76, а. В этой схеме параллельно обмотке возбуждения ОВ включен шунтирующий резистор Rш, при изменении сопротивления которого будут изменяться ток в обмотке возбуждения и магнитный поток ДПТ.
Механические характеристики ДПТ последовательного возбуждения при изменении магнитного потока показаны на рис 3.76, б. При Rш=∞ ДПТ последовательного возбуждения включен по своей основной схеме и имеет естественную характеристику.
При фиксированном моменте и, следовательно, токе якоря ДПТ уменьшение Rш приводит к уменьшению Iв, Ф, что, в свою очередь, в соответствии с (3.163) и (3.164) вызывает увеличение скорости ДПТ.
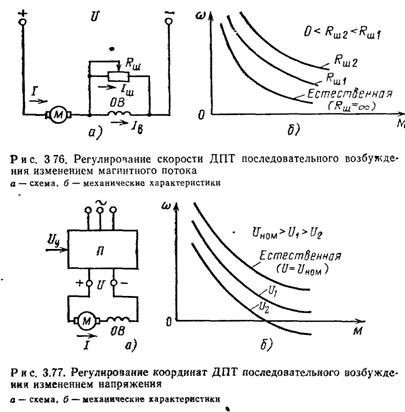
Поэтому искусственные характеристики ДПТ располагаются выше естественной, как это и показано на рисунке При I→0 M→0, Ф→0, w→∞, т. е. и в этом случае ось скорости является асимптотой для всех механических характеристик.
Показатели регулирования скорости этим способом для ДПТ последовательного возбуждения аналогичны таковым для ДПТ независимого возбуждения, рассмотренным в гл.3.
Регулирование координат ДПТ последовательного возбуждения изменением напряжения осуществляется в схеме рис. 3 77, а, в которой для этого используется источник регулируемого напряжения (преобразователь) П. Выходное напряжение преобразователя U регулируется в соответствии с изменением входного управляющего сигнала Uу. Механические характеристики ДПТ последовательного возбуждения при различных выходных напряжениях преобразователя показаны на рис 3.77, б. При U=Uном и пренебрежимо малом внутреннем сопротивлении преобразователя П ДПТ имеет естественную характеристику. При снижении напряжения в соответствии с (3.163) и (3.164) скорость ДПТ снижается и характеристики располагаются ниже естественной Существенно отметить, что жесткость характеристик не изменяется При I®0, М®0, Ф®0, w®0, т. е. ось скорости является асимптотой характеристик ДПТ.
Показатели регулирования координат путем изменения напряжения в основном соответствуют таковым для электропривода с ДПТ независимого возбуждения.
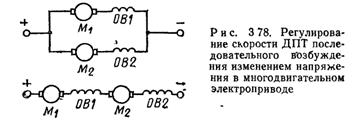
Некоторое практическое распространение получила реализация этого способа регулирования скорости применительно к многодвигательному электроприводу с ДПТ последовательного возбуждения, когда два одинаковых ДПТ работают на общий вал. Такая система электропривода находит применение в электрическом транспорте, на мощных разливочных кранах, в доменных подъемниках и т. д. Изменение подводимого к ДПТ напряжения в этом случае достигается путем их последовательного или параллельного включения. При включении ДПТ параллельно, как это показано на рис. 3.78, к ДПТ подводится полное (номинальное) напряжение сети и они вращаются с большой скоростью. При переключении их на последовательное соединение к каждому ДПТ подведено половинное напряжение сети и они вдвое снизят свою скорость Как видно, этот способ обеспечивает только ступенчатое регулирование скорости.
3.18. РЕГУЛИРОВАНИЕ СКОРОСТИ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ В СХЕМАХ С ШУНТИРОВАНИЕМ ЯКОРЯ
На практике применяется схема с шунтированием якоря, показанная на рис. 3.79. Характеристики ДПТ последовательного возбуждения в этой схеме получим, проведя следующий качественный анализ.
Шунтирующий Rш и последовательный Rп, резисторы вместе с обмоткой возбуждения образуют делитель напряжения. За счет этого к якорю ДПТ подводится пониженное напряжение, и его характеристики располагаются ниже естественной.
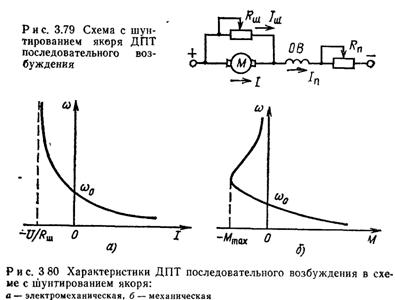
При токе якоря I=0 ток возбуждения Iв=Iп за счет наличия шунтового резистора Rш не равен нулю. Поэтому отличен от нуля и магнитный поток и двигатель имеет определенную конечную скорость идеального холостого хода w0.
При скорости ДПТ большей w0 ток в якоре меняет свое направление, и ток возбуждения Iв=Iп по мере роста скорости уменьшается При стремлении тока якоря к значению I=U/Rш ток возбуждения и магнитный поток стремятся к нулю, а скорость ДПТ – к бесконечности, т. е. вертикальная линия с абсциссой I=U/Rш является асимптотой электромеханической характеристики, которая на основании проведенного анализа изображена на рис 3 80, а.
Для изображения участка механической характеристики во втором квадранте обратимся к формуле для электромагнитного момента ДПТ (3.3). При w=w0 I=0 и М=0, а при I® U/Rш Ф®0 и М®0 Другими словами, ось скорости является асимптотой участка механической характеристики ДПТ во втором квадранте. Момент ДПТ, равный нулю при w0 и w®¥, в промежуточном интервале имеет максимум Мmax, что и отражено в механической характеристике рис. 3.80, б.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
