

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
значение х2 неизменно. Затем определяется полученное при этом приращение б/7! величины F, которое можно считать пропорциональным значению величины частной производной
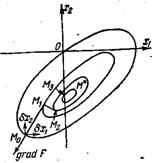
Рис IV-5. Поиск минимума функции методом градиента.
![]()
(если величина dxi всегда одна и та же). Далее производится приращение 6х2 величины х2. В это время х\ = const. Получаемое при этом приращение 6F2 величины F является мерой другой частной производной
l£-Ef-coi»l«''» <IV"69>
Определение частных производных (IV, 68) и (IV, 69) означает, что найден'вектор с координатами dF/dxi и дР/дх2, который называется градиентом величины F и обозначается как
![]()
Известно, что направление этого вектора совпадает с направлением наиболее крутого возрастания величины F. Противоположное ему направление — это направление «наискорейшего спуска», или другими словами, наиболее крутого убывания величины F.
После нахождения составляющих градиента пробные движения прекращаются и начинаются рабочие шаги по направлению, противоположному направлению градиента, причем величина шага тем больше, чем больше абсолютная величина вектора grad F. Эти условия осуществляются, если величины рабочих шагов да;* и Д#2 пропорциональны полученным ранее значениям частных производных:
![]()
где а — положительная константа.
После каждого рабочего шага оценивается приращение А/7 величины F. Если оно оказывается отрицательным, это означает, что движение происходит в правильном направлении и нужно двигаться в том же направлении МоМ\ дальше. Если же в точке mi результат измерения показывает, что Д/7 > 0, то рабочие движения прекращаются и начинается новая серия пробных движений. При этом определяется градиент gradF в новой точке М\, затем рабочее движение продолжается по новому найденному направлению - наискорейшего спуска, т. е. по линии М\М2, и т. д. Этот метод называется методом наискорейшего спуска или методом крутого восхождения.
-Когда система находится вблизи минимума, показателем чего является малое значение величины
![]()
происходит переключение на более «осторожный» метод поиска, так называемый метод градиента. Последний отличается от метода-наискорейшего спуска тем, что после определения градиента grad F делается лишь один рабочий шаг, а затем в новой точке опять начинается серия пробных движений. Такой метод поиска обеспечивает более точное установление минимума, чем метод наискорейшего спуска, между тем как последний позволяет быстрее приблизиться к минимуму. Если в процессе поиска точка М доходит до границы допустимой области и хотя бы одна из величин mi, М2 меняет знак, метод меняется и точка М начинает двигаться вдоль границы области.
Эффективность метода крутого восхождения зависит от выбора масштаба переменных и вида поверхности отклика. Поверхность со сферическими контурами дает быстрое стягивание к оптимуму.
Недостатки метода крутого восхождения:
1. Ограниченность экстраполяции. Двигаясь вдоль градиента, мы основываемся на экстраполяции частных производных целевой функции по соответствующим переменным. Однако форма поверхности отклика может изменяться и необходимо изменять направление поиска. Другими словами, движение на плоскости не может быть продолжительным (см. пример IV-6).
2. Трудность поиска глобального оптимума. Метод применим для отыскания только локальных оптимумов. ,
Метод крутого восхождения при наличии
ограничений
При наличии ограничений на изменение параметров целевой функции базисная точка выбирается так, чтобы она лежала в пределах ограничений, и поиск начинают по методу крутого восхождения. После расчета следующей точки оценивается: не произошло ли нарушения ограничений; если нарушения нет, поиск продол*
222
Дается. Когда какое-либо ограничение нарушено, производят расчет градиента в соответствии с учетом ограничений (см. ниже).
Может быть использован также метод, согласно которому при одном нарушении ограничений точка возвращается на линию ограничений. Когда существует более чем одно ограничение, и в каж* дый момент времени новое ограничение нарушается, метод тре* Сует, чтобы точки были перенесены к новому ограничению. В этом; методе принимается, что оптимум лежит на ограничении. 1
По методу Розенброка функция цели видоизменяетея введением множителей. Всякий раз, как одно из переменных нарушает ограничения, множитель равен нулю, т. е. функция цели умножается на нуль и поэтому. равна нулю. Если значения переменной находятся в пределах допустимого режима, множитель равен 1 и целевая функция принимает ее полное значение. Однако, когда значения переменной снижаются до пределов, предписываемых «пограничной зоной», множительный фактор изменяется параболически от 0 до 1 в пределах пограничной зоны и целевая функция изменяется от 0 до ее полного значения.
для удобства на примере однопараметрического объекта, в котором организация движения сводится к выбору соотношения между скоростью изменения входа системы и сигналом, полученным с устройства, определяющего положение экстремума. Как и в обычных системах регулирования, в экстремальных системах возможно построение релейных и линейных систем. В релейных экстремальных системах для управления движением используется лишь знак показателя экстремума; величина сигнала, поступающего на исполнительный механизм, не зависит от расстояния до экстремума. Такие системы называются экстремальными системами с независимым поиском. Если же для управления движением используется и величина показателя экстремума, т. е. скорость движения зависит от расстояния до экстремума, то системы называются системами с зависимым поиском или пропорциональными.
При поиске по чувствительности и при шаговом поиске по приращениям возможно использование как систем с независимым поиском, так и пропорциональных систем. Системы с запоминанием экстремума не могут изменять скорость пропорционально расстоянию до экстремума, так как при движении к экстремуму показатель экстремума е= 0 и только после экстремума s^fc 0. Поэтому системы с запоминанием экстремума обязательно релейные.
Иначе обстоит дело в многомерных системах. Как известно, функция нескольких переменных у = f (х±, х2, . . . , хп) имеет при системе значений (х1э, х2э, ..., хпэ) в точке Рэ экстремум, если можно указать такое число е, что область х19 — е < х1э < д:1э + + е, Х2э — е < Х2э < Х2э + е, .. ., х„э — е < хпэ < хпэ + е входит
в область задания функции и для каждой системы значений в этой области, кроме самой системы (х19, х2э,..., хпэ), удовлетворяются условия
/ (xv xz,..., xn) < / (х1э, х2э,..., хпэ) — для случая максимума и / (*!, *2,..., хп)> f (х19, х2э,..., хпэ) — для случая минимума.
Из определения видно, что для нахождения положения экстремума необходимо проводить исследование поведения объекта при изменении всех параметров. Способ перехода от одного управляющего параметра к другому и алгоритм движения поэкстремальней поверхности определяет организация движения к экстремуму.
Все существующие методы поиска многомерного экстремума можно разделить на две основные группы: регулярный поиск и случайный. К основным методам регулярного поиска относятся.
Метод сканирования. Этот метод заключается в последовательном переборе всех возможных состояний системы. Oflf позволяет определить экстремум за один цикл поиска, однако для^ поиска экстремума многомерных систем применяется в очень редких случаях — в экстремальных дискретных системах с небольшим числом возможных состояний. В основном метод сканирования применяется при настрой-
ке одномерных многоэкстремальных систем на глобальный экстремум.
Сканирующий трехканальный оптимизатор установлен в аналоговой моделирующей машине МН-11.
Метод Гаусса—Зайделя. Суть метода сводится к поиску экстремума последовательно по всем координатам так, что на каждом этапе экстремум отыскивается только по одной координате, т. е.
—L-= 0. Этим методом за один цикл поиска не удается найти xi искомое состояние.
На рис. 1.8, а показана экстремальная поверхность. Допустим, что в начальный момент объект находится в точке А, которой соответствует координата уа и воздействия xla и *2а. Через точку Л проведем плоскость Slt параллельную плоскости хгу. Пересекаясь
т
с экстремальной поверхностью, она дает экстремальную линию /. Оставляя х2 постоянным, ищем этот частный экстремум (т. е. условие ~- — 0) путем изменения хг от xla до хи. Получаем точку
В. Проведем плоскость S2 через точку В частного экстремума, параллельную плоскости х$. Пересечение ее с экстремальной поверхностью даст экстремальную линию 2. Оставляя х± постоянным,
соответствующим условию -^— — 0, ищем второй частный экстремум (т. е. условие -^—= 0) путем изменения х2 от х2а до х2с. Получаем точку С.
Повторяем эту операцию до тех пор, пока ~- и -~- не станут
ох1_ oxz
равными нулю. Практически вектор состояния у будет совершать колебания около экстремальной точки, при попеременном изменении хг и х2. Указанный метод нетрудно распространить на любое число переменных, от которых зависит экстремум.
Возьмем теперь линии равных значений у, которые обозначим бис. Проекции этих линий на плоскость х^х2 обозначим Ъ' и с'. Из чертежа видно, что переключать хг и х2 нужно тогда, когда траектории х± и х2 станут касательными к проекциям линий равных значений у, т. е. к кривым Ь' и с'.
Основным недостатком метода является медленная сходимость поиска и невозможность настройки в некоторых случаях. Достоинство метода заключается в простоте алгоритма и его схемной реализации, что в ряде случаев оказывается решающим при выборе метода поиска.
Метод градиента. Сущность метода состоит в том, что система движется в направлении, обратном мгновенному направлению вектора градиента функции. При этом движение может быть непрерывным или шаговым.
Градиентом, grad у называется вектор, направленный по нормали к поверхности уровня в сторону возрастания (убывания) функции у и численно равный скорости изменения функции по направлению нормали
|grady| = ^. (1-18)
Рассмотрим экстремальную поверхность (рис. 1.8, б). Спроектируем на плоскость хгх2 линии равного значения у. Получим концентрические эллипсы, если экстремальная поверхность аппроксимирована эллиптическим параболоидом. Допустим, что объект находится в точке А, которой соответствует координата уа и воздействия xla и х2а. Возьмем градиент в точке А
grad,a = ^.
Геометрически градиент будет являться перпендикуляром к касательной в точке А' на линии равного значения. Проекции градиента на оси Xi и х2 соответственно будут:
л ду
grad,,«/ = —;
л ду
grad,,,,^.
Начнем изменять воздействия хг и х2 со скоростью, пропорциональной градиентам:
/ х - а ^Lf Xi - а, ^ г,
ду,
x2 = az—^-t. дх2
Непрерывно измеряя градиент и меняя пропорционально ему скорости воздействия хг и х2 , будем перемещаться от одной линии
„ du равных уровней к другой, пока не достигнем точки, где •—• =
-р - = 0. Полученная траектория АО на экстремальной поверхности является траекторией шарика, свободно скатывающегося под действием силы тяжести из экстремальной точки. В этой точке изменение х± и х2 нужно прекратить. Практически вектор у будет совершать колебания около точки экстремума при небольших изменениях *! и xz.
Можно пойти по другому пути, который проще осуществим. Измерять градиент не непрерывно, а дискретно с некоторым шагом h. Воздействия х. г и х2 меняются скачками, величины которых пропорциональны составляющим градиента:
л l ду
Д*1 = bi -=г;
дхг
. 1 ду
Д*2 — Ь2 -^- •
0*2
При таком методе поиска экстремум достигается достаточно быстро.
Очевидно, что при шаговом движении сходимость поиска зависит от правильности выбора рабочего шага (коэффициента Ь^. При значительных bl и ярко выраженной нелинейности оптимизируемой функции в окрестности yl поиск может расходиться. При малых bt и функции, близкой к линейной, возрастает время движения к экстремуму за счет увеличения времени анализа составляющих градиента и рабочего времени.
Непрерывное движение возможно при непрерывном измерении всех составляющих градиента, а это осуществимо лишь при поиске с разнесением частот поискового сигнала (о>П(. =f= o>n;.; t =£='/)•
215
При шаговом поиске методом градиента значительным недостатком является необходимость сложного анализа (п пробных шагов перед рабочим шагом.) Наиболее ценным свойством, способствующим использованию метода градиента, является его точность. Определение градиента производится одним из способов, изложенных в §1.3.
Метод наискорейшего спуска. Этот метод является развитием шагового поиска методом градиента. Сущность его заключается в следующем (рис. 1.8, в). Начальное положение характеризуется точкой А, в которой градиент
i*rad^ -(-?-).•
Запишем проекции градиента на оси хг и xz gra<U »=•!*-;
OXi
gwO = -^ •
dxz
Пропорционально градиентам будем изменять х± и х2 до тех пор, пока не получим -^— = 0. Это произойдет тогда, когда вектор
градиента коснется какой-либо проекции линии равных значений у (точка В). В этой точке снова замеряем градиент
1^> = (ж1
Опять изменяем хг и х2, скорости которых пропорциональны составляющим градиента до тех пор, пока —rf-=fc= 0. Повторяя ука-
fl/2
занные операции несколько раз, попадем в точку экстремума по траектории АВО. Во время поиска х± и х% можно мен ять шагами или непрерывно.
Метод наискорейшего спуска несколько проще метода градиента и дает достаточно малое время выхода в экстремальную точку.
Методы наискорейшего спуска и градиента можно распространить на п независимых переменных.
При непрерывном движении новое измерение градиента производится при -jjj-= 0, ибо при неподвижной экстремальной поверхности значение -^-= 0 означает, что —Цг - = 0. При шаговом движении такой алгоритм позволяет выбирать коэффициент bt при меньшем объеме априорной информации о характере оптимизируемой функции, ибо уменьшение скорости рабочего шага не приводит к увеличению времени анализа. Нетрудно заметить, что чем более полога линия градиента оптимизируемой функции, тем выгоднее
216
использование метода наискорейшего спуска по сравнению с методом градиента. Большая скорость сходимости является основным преимуществом этого метода и делает его основным при настройке многомерных систем.
Очевидно, что в случае объекта с существенно нелинейными градиентными направлениями метод наискорейшего спуска вырождается в метод градиента.
Кроме регулярного поиска, существует множество алгоритмов случайного поиска, в основе которых лежит случайный перебор состояний системы из множества возможных состояний {X}, обеспечивающих множество значений {Y}, на выходе системы. Перебор состояний прекращается, если система попадает в подмножество {X*}, обеспечивающее выполнение заданного требования, т. е. при у £{Y*}. Методы случайного поиска не получили пока широкого распространения. Преимущества и отличия методов случайного поиска от регулярного аналогичны преимуществам и отличиям случайной выборки по сравнению с регулярной. Случайный поиск именно в силу случайности выбора очередного состояния систем не может попасть в ловушку типа «седла» для метода градиента или «хребта» для метода Гаусса — Зайделя.
Рассмотрим некоторые алгоритмы случайного поиска и прежде всего — алгоритм чисто случайного поиска, впервые примененный в гомеостате Эшби. Поиск основан на определении знака приращения функции качества при случайном направлении пробного шага. Если направление пробного шага оказалось результативным (знак приращения соответствует цели поиска: плюс при поиске максимума или минус при поиске минимума), то в этом же направлении делается рабочий шаг, а из нового положения — пробный шаг в случайном направлении. Если в результате пробного шага приращение показателя качества не соответствует поставленной задаче, то рабочий шаг не производится, а система либо возвращается в исходное положение и делает пробный шаг в другом направлении, либо осуществляет пробный шаг в новом направлении из той точки, куда ее привел предыдущий (неверный) пробный шаг. Эти варианты чисто случайного поиска называются соответственно случайным поиском с возвратом и случайным поиском с пересчетом. На рис. 1.9 показано движение системы при обоих вариантах поиска.
Алгоритм случайного поиска с возвратом может быть записан в виде
*i4l ~ Xi ~Ь_Д*/+1°> _
I а С при y(xi) ^ y(xi+ l);
АлГ _ ) ^
/+1l -A^. при у (*/>#(*!-И).
где х — вектор состояния входа объекта; С —случайный единичный вектор; а — величина рабочего шага.
Знаки неравенств определяются целью поиска (максимум или минимум).
Алгоритм случайного поиска с пересчетом можно записать в следующем виде:
Рис. 1.9. Организация движения к экстремуму при случайном поиске
В [39] приведены исследования количества проб, обеспечивающих заданную вероятность успеха поиска, и показано, что число проб не зависит от количества регулирующих воздействий. Необходимое число проб п может быть определено из соотношения
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
