

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра электрооборудования по курсу "Структурный анализ и синтез" на тему "Параметрическая идентификация" Выполнил магистрант гр. МЭО-01 _____________________________ "____"___________________2001 Принял доцент к. т.н. _____________________________ _____________________________ "____"___________________ 2001
КУРСОВАЯ РАБОТА
ВВЕДЕНИЕ………………………………………………………………..
1. ПРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ………………………….
1.1. Декомпозиция……………………………………………………….
1.2. Структура……………………………………………………………
1.3. Звено…………………………………………………………………
1.4. Требования к звеньям……………………………………………….
1.2. Методы описания объекта……………………………………………
1.3. Целевые функции идентификации……………………………………
1.4. Организация движения по экстремальной поверхности…………….
ЗАКЛЮЧЕНИЕ……………………………………………………………..
БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………………………………..
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Дудников математических моделей химико-технологических объектов / , , 1976.
2. Кафаров анализ процессов химической технологии, 1976.
3. Солодовников. Техническая кибернетика. Теория автоматического управления. Книга 1, 1976.
4. Красовский. Справочник по теории автоматического регулирования.
5. Челикин. Электропривод, 1979.
6. Берёзин вычислений / ёзин, , 1966.
Выше звено было определено как математическая модель элемента. Вообще же звеном называют математическую модель элемента, соединения элементов или любой части системы. Звенья, как и системы, могут описываться дифференциальными уравнениями довольно высокого порядка, и в общем случае их передаточные функции могут быть записаны в виде

Но всегда их можно представить как соединения типовых или элементарных звеньев, порядой дифференциальных уравнений которых не выше второго.
Из курса алгебры известно, что полином произвольного порядка можно разложить на простые множители — множители вида
![]()
поэтому передаточную функцию (2.41) можно представить как произведение простых множителей вида (2.42) и простых дробей вида
![]()
Звенья, передаточные функции которых имеют вид простых множителей (2.42) или простых дробей (2.43), называют типовыми или элементарными звеньями.
Прежде чем переходить к изучению элементарных звеньев, вспомним формулы для модуля и аргумента комплексного числа. Пусть комплексное число представлено в виде отношения двух произведений комплексных чисел.
Так как z- - |гг! е''аг0гг, \ = |zje/arir4 то для модуля и аргумента комплексного числа имеем
Таким образом, справедливо следующее правило модулей и аргументов комплексных чисел: модуль комплексного числа, представленного в виде отношения двух произведений комплексных чисел, равен отношению произведения модулей сомножителей числителя к произведению модулей сомножителей знаменателя, а его аргумент — разности суммы аргументов сомножителей числителя и суммы аргументов-сомножителей знаменателя.
' Пропорциональное звено. Пропорциональным называют звено, которое описывается уравнением у (t) — ku (t), или, что то же, передаточной функцией W (s) — k.
Частотные и временнйе функции этого типового звена имеют следующий вид:
![]()
На рис. 2.4 представлены некоторые из характеристик пропорционального звена: амплитудно-фазовая частотная характеристика (рис. 2.4, а) есть точка на действительной оси; фазовая частотная характеристика (и ЛФЧХ) совпадает с положительной полуосью частот; логарифмическая амплитудная частотная характеристика (рис. 2.4, б) параллельна оси частот и
Структурной схемой в теории автоматического управления называют графическое изображение математической модели автоматической системы управления в виде соединений звеньев. Звено на структурной схеме условно обозначают в виде прямоугольника с указанием входных и выходных величин, а также передаточной функции внутри него. Иногда вместо передаточной функции указывают уравнение или характеристику. Звенья могут быть пронумерованы и их передаточные функции, уравнения или характеристики представлены вне стоуктуоной схемы.
* Входные и выходные величины записывают в виде изображений, если передаточные функции задают в форме изображений. Если же передаточные функции задают в операторной!$&рм€ или звенья описывают дифференциальными уравнения-• jiist.To входные и выходные переменные записывают в виде ори-%№ала.
Сравнивающие (рис. 2.13, а, б) и суммирующие (рис. 2.13,<?) |венья изображают в виде круга, разделенного на секторы. ;Щ-сравнивающем звене сектор, на который подается «вычитае-|юе», затемняют (рис. 2.13, б) или перед соответствующим входом ставят знак минус (рис. 2.13, а).
.<; Структурную схему широко используют на практике при ^исследовании и проектировании автоматических систем управления, так как она дает наглядное представление о связях &ежду звеньями, о прохождении и преобразовании сигналов в системе.
При математическом описании автоматическую систему обычно изображают в виде блок-схемы и для каждого «блока» '(элемента) записывают уравнения, исходя из физических законов, которым подчиняются процессы в нем. Структурную схему можно составить на основании этой блок-схемы и полу->ченных уравнений или только на основании последних. И дальнейшие преобразования, необходимые для получения уравнений и передаточных функций системы, проще и нагляднее производить по структурной схеме.
Звено на структурной схеме не обязательно изображает 'Модель какого-либо отдельного элемента. Оно может быть мо-^елью элемента, соединения элементов или вообще любой час-(|ги системы.
I \ Основные правила преобразования структурных схем.
:|. Последовательное соединение звеньев (рис. 2.14, а). При
; последовательном соединении выходная величина каждого
! ^предшествующего звена является входным воздействием по-
{следующего звена. При преобразовании структурных схем це-
|почку из последовательно соединенных звеньев можно заме-
тить одним звеном (рис.
'2.14, б) с передаточной функцией W (s), равной произведению передаточных функций отдельных
-звеньев: W (s)^=l\Wi (s). / = i
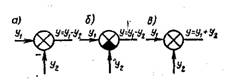
Рис. 2.13
достаточно широкими частотными спектрами. Наиболее часто используют сигналы регулярной формы: ступенчатую функцию, импульс и т. п. Амплитуды х* (t} также должны варьироваться в широком диапазоне [л^.*, #*], чтобы влияние нелинейных свойств объекта наиболее существенно отразилось на форме yi(t). Диапазон \Xj*, x*j\ ограничен, с одной стороны, правилами безопасной эксплуатации объекта и, с другой стороны, уровнем помех, не коррелированных С Xj(t).
Выбор различных начальных условий у* (0) позволяет более уверенно судить о виде переходных процессов y\(t}. В ряде случаев г/| (0) являются одновременно возмущающими воздействиями, например, при исследовании кинетики химических реакций.
В качестве xa(t) можно использовать случайные флуктуации входных координат. Однако такой прием проведения эксперимента не получил пока широкого распространения, ибо соответствующие флуктуации tji(t) обычно невелики, что усложняет задачу нахождения aiv,- Время наблюдения за случайными процессами яэ(/) и y3(t), необходимое при этом, в десятки и сотни раз больше интервала наблюдения Гн, поэтому на форме функций г/э(/) может начать сказываться нестационарность объекта.
Итогом экспериментальных исследований динамики объекта является таблица соответствий функций х*к (t) и у*к (t) (О <J t <! Тн), где К — номер возмущения x9f(t) и реакции y\(t} на него (Л, = 1, 2, ...,d).
Опыты на объекте, предназначенные для определения aiv, в уравнениях (IX. 4) и (IX. 5), не отличаются от опытов по исследованию статики экспериментальным методом. В ЭАМ применяют преимущественно активные методы исследования, изменяя поочередно или одновременно в соответствии с некоторым планом координаты Xj(t] на величину &х} = (x*f — x^jd, где d — число различных уровней возмущающего сигнала. После* окончания переходного процесса фиксируется установившееся значение #|(УН), где Гн — интервал наблюдения, величина которого зависит от уровня помех, действующих на объект.
Результаты опытов представляются набором таблиц соответствия **Л, у*к (i = 1, 2, ..., я; / = 1, 2, ..., т; Я = 1, 2, ..., d).
Определение параметров а/р. уравнений статики и динамики
Задача нахождения параметров aiVi уравнений (IX. 3) — (IX. 5) формально сводится к задаче наилучшего степенного приближения экспериментальных данных решениями уравнений, т. е. требуется подобрать параметры aiv. такими, чтобы решение yi (t)' (0^.t ^. Гн) ^системы дифференциальных уравнений (IX. 3) при x(t)===x3(t) и I// (0) — У] (0) наилучшим образом совпадало с наблюденными функ-
циями y9t(f). Мерой близости yt(t) и y](t) может служить величина некоторого функционала
![]()
Здесь функция Ф^О. В качестве Ф\ обычно принимают следующее выражение:
![]()
где s =st 1-или 2. Чаще всего Ё практических расчетах используется функционал
![]()
При проведении экспериментов на химико-технологических объектах часто измеряют выходные координаты в равноотстоящие моменты времени tj (/= О, 1, 2, ..., /). Поэтому выражение (IX/7) преобразуется к такому виду:-.

Решение y.i\(t) есть функция от х^(1), y^(Q) и параметров ащ\ но возмущения x*(t) и начальные условия уэ1К (0) известны и неизменны, поэтому #гх(0 зависит только от я^и, т. е. функционал (IX. 7) превращается в функцию nk переменных аг-ц:
![]()
Неизвестные параметры aiv, системы (IX. 3) надо выбирать такими, чтобы функция Ф(а) достигала минимального значения. Заметим, что Ф(а) удается написать в явной форме тогда, когда система (IX. 3) имеет аналитическое решение. В большинстве же случаев функция Ф(а) строится и исследуется косвенным образом: интегрируется система (IX. 3) при конкретных значениях а^, yiK(0) = у*к(0) и х(1)=хэ(1) на отрезке времени [О, Тк] и решения yi\(t) или г/ixj подставляются в выражения (IX.7) или (IX.8). Затем изменяются aiu и снова вычисляются ум(t) и значение Ф(а).
Для нахождения параметров, уравнений статики (IX. 4) также можно минимизировать функцию

Параметры уравнений статики (IX. 4) выбираются из условия; минимума функции
![]()
В уравнениях (IX. 10) и (IX.11) число экспериментальных данных должно быть, очевидно, не меньше; числа неизвестных пара-_метров в{Ц (£= 1, 2, ..., я; ц == 1, 2, ...,'&).
Итак, задача определения параметров аг-ц уравнений динамики и статики свелась в конечном счете к задаче нахождения минимума функции nk переменных.
Предположим, что каким-либо способом найден набор коэффициентов aiVt, при которых функция Ф (а) достигает минимума. Подставим о^ в уравнения (IX.3)— (IX.5) и получим математическое описание динамики
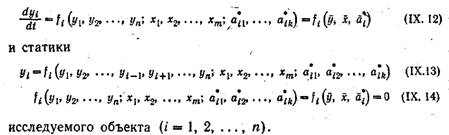
Можно сказать, что зависимости (IX.12) — (IX.14) наилучшим образом описывают статические и динамические свойства объекта. Термин «наилучшим образом» здесь носит условный характер, так как. существуют, очевидно, другие математические зависимости (IX.3) — (IX.5), которые могут более точно в смысле минимума Ф характеризовать наблюдаемые в объекте явления. Кроме того, могут существовать другие виды возмущающих сигналов x*(t] и реакций объекта y3(t) на них, на которых будет достигаться совершенно другой минимум Ф(а) и другие параметры ащ,-
В общем случае величина минимума Ф не может служить мерой точности или, тем более, правильности описания динамики и статики объекта выражениями (IX. 12) — (IX. 14), так как она зависит от отношения числа независимых экспериментальных данных к числу неизвестных, уровня помех, формы сигналов x3(t), способа отыскания экстремума и т. п. Для проверки адекватности математической модели (IX. 12) — (IX. 14) с движениями координат реального объекта следует использовать результаты дополнительных экспериментов #/ЛООд, которые не включались в функцию Ф(а). Величина функционала

в некотором смысле уже может характеризовать точность описания динамики объекта уравнениями (IX.12). Здесь */а(Од — решение системы (IX.12) при */а(0)-у\к(0)д, x(t) = x*(t\.
Аналогичным образом и точность описания статики объекта характеризуется величиной Фд, вычисленной по дополнительным экс-, периментальным данным у31К.
Задача определения aj из условия минимума функции многих переменных Ф(а) достаточно сложна и будет рассматриваться в дальнейшем. Здесь же разбираются некоторые особенности и сфера применения системы уравнений (IX. 12) —(IX. 14).
Система уравнений (IX. 12) —(IX. 14) приближенно справедлива для возмущений x3}(t\ принадлежащих отрезку [х^, x*f]. Экстраполяция системы на возмущения вне диапазона [*,,, л;]!] не гарантирует сохранение точности математического описания.
Уравнения динамики (IX. 12) справедливы, строго говоря, только для начальных условий у\ (0). Распространение действия уравнений (IX. 12) на любые #г-(0) допустимо для корректных по начальным условиям дифференциальных уравнений (IX.3) с той же оговоркой, что и для Xj3. Требование корректности уравнения означает, что бесконечно малым вариациям г/г-(0) будут соответствовать бесконечно малые изменения решения yi(t) в любой точке t интервала [О, Гн]. Для корректности дифференциального уравнения требуется непрерывность /г и dfi/dyi при любых / из диапазона [О, Гн] [1]. Если уравнения системы (IX.3) корректны и если при снятии переходных процессов y3.(t) варьировались, начальные условия г/?(0) в некотором интервале [#*(())*, #г(0)*], то зависимости (IX. 12) могут быть использованы для описания. динамики объекта при любых 1/г-(0) в диапазоне [г/г (0)#, t/i(0)*].
Уравнения (IX. 12) — (IX. 14) справедливы для объекта, на котором проводился эксперимент. Эта особенность ЭАМ является его недостатком неодновременно, преимуществом по сравнению с аналитическим методом.
-Невозможность описания динамики и статики широкого класса однотипных объектов уравнениями (IX. 12) — (IX. 14) заставляет проводить эксперименты на каждом конкретном объекте и каждый раз заново определять параметры aj^. Отсюда ясно, что методы нахождения а^ должны быть не бчень трудоемкими.
Вместе с тем использование экспериментальных данных, полученных при испытании конкретного объекта, позволяет косвенно* через значения а^, учесть все его индивидуальные особенности^ чего нельзя сделать при аналитическом составлении математического описания.
Параметры а*^ уравнений (IX. 12) — (IX. 14) имеют определенный физический и химический смысл или характеризуют конструкцию аппарата (энергии активации, коэффициенты теплопередачи,
поверхности нагрева и т. п.). Каждая из величин а*^, найденных из условия минимума Ф(а), может отличаться от аналогичной величины, определенной в лабораторных условиях. Эта особенность ЗАМ объясняется следующими причинами:
1) значения a*ivi находятся приближенными методами (см. стр. 216—240); .
2) параметры а*ц определяются из условия минимума недостаточно представительной функции Ф(а), статистическая достоверность которой зависит от числа экспериментальных данных, формы и амплитуды испытательных сигналов и т. п.;
3) величины а*й учитывают действие на объект различных явлений, постоянных факторов и помех, не учитываемых в уравнениях (IX. 3)—( IX. 5);
4) значения параметров я*^ в аналитическом методе находятся обычно независимо друг от друга расчетным или экспериментальным способом (эти параметры определяются при ряде ограничений и условий, выполнимость которых зачастую трудно или невозможно установить либо обеспечить при постановке опытов на конкретном Объекте).
Из краткого анализа особенностей ЭАМ следует, что этот метод удачно объединяет основные положительные свойства аналитического и экспериментального методов. Первый и второй этапы ЭАМ совпадают с соответствующими частями аналитического и экспериментального метода. Принципиальное отличие ЭАМ заключается в способе определения параметров уравнений статики и динамики.
МЕТОДЫ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ УРАВНЕНИЙ СТАТИКИ
При нахождении параметров уравнений статики экспериментально-аналитическим методом составляют функцию Ф(а), явно зависящую от переменных aiu, (i = 1, 2, ..., п\ ц, = 1, 2, ..., k). Функцию Ф(а) вида (IX. 10) и (IX. 11) получают и при Определении параметров уравнений динамики, для которых можно найти аналитические решения, что возможно для линейных по г/г - функций fi или для систем (IX. 3), преобразуемых к уравнениям с разделяющимися переменными. Примеры определения aiv, линейных дифференциальных уравнений рассматриваются в гл. XI. Приемы нахождения ащ нелинейных дифференциальных уравнений с разделяющимися переменными разбираются в гл. X.
Для лучшего понимания возможностей того или иного метода минимизации функции Ф(а) приведем определения основных терминов теории экстремальных решений. Для удобства записи будем пока рассматривать функцию Ф(а) = Ф{а\,а2, ...,ап) от п переменных.
Пусть функция Ф(а) определена и непрерывна вместе с производными
![]()
1.4.2. Градиентные методы оптимизации. Градиентные методы оптимизации относятся к численным методам поискового типа. Эти методы универсальны, хорошо приспособлены для современных цифровых вычислительных машин и весьма эффективны в большинстве случаев поиска экстремального значения нелинейных функций с ограничениями и без них, а также, когда функция вообще аналитически неизвестна. Вследствие этого градиентные, или поисковые, методы широко применяются на практике. Сущность указанных методов заключается в определении значений независимых переменных, дающих наибольшие изменения целевой функции. Обычно это достигается при движении вдоль градиента, ортогонального к контурной поверхности в данной точке.
Различные поисковые методы в основном отличаются друг от друга способом определения направления движения к оптимуму, размером шага и продолжительностью поиска вдоль найденного направления, критериями окончания поиска, простотой алгоритмизации и применимостью для различных ЭВМ. Техника поиска экстремума основана на расчётах, которые позволяют определить направление наиболее быстрого изменения оптимизируемого критерия.
Если критерий задан уравнением:
![]() ,
,
то его градиент в точке ![]() определяется вектором:
определяется вектором:
 .
.
Частная производная ![]() пропорциональна косинусу угла, образуемого вектором градиента с i-ой осью координат. При этом:
пропорциональна косинусу угла, образуемого вектором градиента с i-ой осью координат. При этом:
 .
.
Основным вопросом, решаемым в методах градиента наряду с определением направления градиентного вектора, является выбор шага движения по градиенту. Выбор величины шага в направлении grad F в значительной степени зависит от вида поверхности. Если шаг слишком мал, это потребует продолжительных расчётов. Если наоборот размеры шага слишком велики, можно проскочить оптимум. Размер шага Dхi должен удовлетворять условию, чтобы все шаги от базисной точки лежали в том же самом направлении, как и направление градиента в базисной точке. Размеры шага по каждой переменной xi вычисляются из значений частных производных в базовой (начальной) точке:
 ,
,
где K - константа, определяющая размеры шага и равная для всех i-ых направлений.
Только в базовой точке градиент строго ортогонален к поверхности. Если же шаги слишком велики в каждом i-ом направлении, вектор из базисной точки не будет ортогонален к поверхности в новой точке. Выбор удовлетворительного шага предполагает, что производная в следующей точке существенно близка к производной в базисной точке. Для линейных функций градиентное направление не зависит от положения на поверхности, для которой оно вычисляется. Если поверхность имеет вид:
-F = CiXi + с2х2 + С3х3 то
dF _ dF _ 6F ~dT,~Cl ~д^~С2 ~д^=асъ
и компонента градиента в i-ом направлении равна
![]()
Для нелинейной функции направление градиентного вектора, зависит от точки на поверхности, в которой он вычисляется.
Несмотря на существующие между градиентными методами различия, последовательность операций при поиске оцтимума в большинстве случаев одинакова и сводится к следующему: а) выбирается базисная точка; б) определяется направление движения от базисной точки; в) находится_размер шага; г) определяется следующая точка поиска; д) значение целевой функции в данной точке сравнивается с ее значением в предыдущей точке; е) вновь определяется направление движения и т. д. до достижения оптимального значения. , '
Методы наискорейшего спуска (крутого восхождения) и градиента
1 Опишем принцип использования градиентных методов на примере функций двух переменных
F = F (Xl, x2) (IV, 66)
при наличии двух дополнительных условий:
#i(*i,*2)<0 Я2(*ь*2)<0 (IV,
Этот принцип без изменения переносится на любое число переменных, а также на любое число дополнительных условий.
Рассмотрим плоскость х\, х2 (рис. IV-5). Каждой точке этой плоскости, согласно формуле (IV, 66), соответствует некоторое значение F. Линии F = const на этой плоскост'и представлены на рис. 1V-5 в виде замкнутых линий, окружающих точку М *, в которой F минимально. Пусть в начальный момент значения х\ и х2 соответствуют точке mq. Цикл расчета начинается с серии пробных шагов. Сначала величине х\ дается небольшое приращение 8х\ > 0, причем в это время

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
