
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 7.5. Логарифмические характеристики звена с отставанием по фазе
Комбинированное (интегро-дифференцирующее) звено:
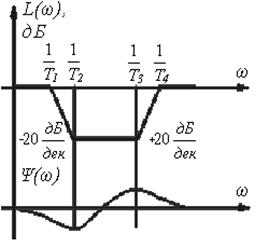
Рис.7.6. Схема и логарифмические характеристики комбинированного звена
Передаточная функция звена:
 ,
,
где ![]() ;
; ![]() ;
; ![]() ;
;  ;
;
![]() .
.
Рассмотрим влияние жесткой и гибкой обратных связей на параметры охватываемых звеньев.
Охватим жесткой обратной связью апериодическое звено (рис.7.7).
Рис. 7.7. Схема апериодического звена, охваченного жесткой обратной связью
Определим передаточную функцию звена:
 ;
;  ;
;  . (7.8)
. (7.8)
Как следует из (7.8), характер звена не изменился, но коэффициент усиления уменьшился в ![]() раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.7.8).
раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.7.8).
Рис.7.8. Эквивалентная схема с последовательно включенных звеном с опережением по фазе
Здесь ![]() .
.
Охватим жесткой обратной связью идеальное интегрирующее звено (рис. 7.9).
Рис.7.9. Схема идеального интегрирующего звена, охваченного жесткой обратной связью
 ;
; ![]() ;
;  , (7.9)
, (7.9)
где ![]() .
.
Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном, обеспечивающим расширение полосы и опережение по фазе, приведена на рис. 7.10.

Рис. 7.10. Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном
Здесь ![]() .
.
Эти два примера показывают, что использование жесткой обратной связи приводит к расширению полосы пропускания следящей системы и одновременному снижению коэффициента усиления системы, что является недостатком жесткой обратной связи.
При гибкой обратной связи на вход охватываемого звена подается производная входного воздействия. В качестве звеньев в цепях обратной связи используются тахогенераторы, RC – цепи, трансформаторы.
Охватим электродвигатель гибкой обратной связью (рис. 7.11).
В цепь обратной связи включен тахогенератор (идеальное дифференцирующее звено). Передаточная функция тахогенератора W(jw) = kтг(jw).
Рис. 7.11. Схема электродвигателя, охваченного гибкой обратной связью
Частотная передаточная функция:
 .
.
Следовательно, при охвате электродвигателя гибкой обратной связью уменьшается коэффициент усиления ![]() и электромеханическая постоянная
и электромеханическая постоянная ![]() в (
в (![]() ) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
Охватим гибкой обратной связью безынерционное звено (рис. 7.12) В цепи ОС включено инерционное дифференцирующее звено.
Рис. 7.12. Схема безынерционного звена, охваченного обратной связью
Определим передаточную функцию:
 ,
,
Такое включение эквивалентно последовательному включению с апериодическим звеном, звена обеспечивающего запаздывание по фазе (рис.7.13).
Здесь
 ;
;  ;
;

Рис.7.13. Эквивалентная схема с последовательно включенным звеном с отставанием по фазе
Включение инерционного дифференцирующего звена последовательно обеспечивает расширение полосы. Включение этого же звена в цепь обратной связи проводит к качественно противоположному эффекту.
Охватим безынерционное звено обратной связью, посредством апериодического звена первого порядка (рис. 7.14)
Рис.7.15. Схема безынерционного звена, охваченного обратной связью
 ;
;
 .
.
Эквивалентная схема с последовательно включенным корректирующим звеном приведена на рис. 7.16.
Здесь
![]() ;
;  ;
;

Рис.7.16. Эквивалентная схема с последовательно включенным корректирующим звеном
Апериодическое звено первого порядка, включенное последовательно обеспечивает сужение полосы и дополнительное запаздывание фазы. Это же звено, включенное в цепь ОС, обеспечивает расширение полосы и положительный сдвиг фазы.
8. Нелинейные системы радиоавтоматики
8.1. Методы исследования нелинейных систем
К нелинейным относят системы, описываемые нелинейными дифференциальными уравнениями.
Система является нелинейной вследствие наличия в ее составе звеньев, описываемых нелинейными дифференциальными уравнениями, или имеющих нелинейную статическую характеристику (например, дискриминационную).
Нелинейный режим работы имеет место в системе при выходе ошибки слежения за пределы линейного участка (переходной режим, срыв слежения, большой уровень помех и т. д.).
Методы анализа нелинейных систем:
Метод кусочно-линейной аппроксимации. Нелинейная характеристика разбивается на ряд линейных участков, в пределах каждого из которых система описывается линейным дифференциальным уравнением. Далее на каждом из этих участков система исследуется линейными методами; находятся решения, описывающие работу системы, которые затем «сшиваются». Метод удобен при небольшом числе участков разбиения. Недостаток метода в громоздкости вычислений при увеличении количества участков.
Метод гармонической линеаризации. Нелинейный элемент (НЭ) заменяется его линейным эквивалентом. Критерий эквивалентности состоит в равенстве первой гармоники напряжения на выходе НЭ и его линейного эквивалента по амплитуде и фазе при подаче на входы НЭ и его эквивалента гармонического сигнала. Метод эффективен, когда все высшие гармоники подавляются последующими цепями.
Метод фазовой плоскости. Применяется для исследования нелинейных систем, описываемых дифференциальными уравнениями первого и второго порядков. Состоит в построении и исследовании фазового портрета системы в координатах исследуемой величины и ее производной.
Используется для анализа переходных режимов работы, оценки устойчивости системы, возможности возникновения периодических колебаний
Моделирование на аналоговых и цифровых вычислительных машинах. Не имеет ограничений на количество и вид нелинейностей, порядок дифференциального уравнения, позволяет исследовать поведение системы при детерминированных и случайных воздействиях.
Отсутствие возможностей найти аналитические зависимости для исследуемых явлений является недостатком метода.
Метод статистической линеаризации. Состоит в замене НЭ его статистическим линейным эквивалентом. Используется для исследования нелинейных систем, описываемых дифференциальными уравнениями произвольного порядка. Метод является приближенным. Имеет место неоднозначность в решениях при использовании различных критериев эквивалентности замены.
Метод, основанный на использовании марковской теории случайных процессов позволяет исследовать системы, описываемые дифференциальными уравнениями первого и второго порядков, работающие в условиях действия случайных возмущений, и получить аналитические выражения для этих систем, что является его достоинством.
На практике используют комбинацию различных методов.
8.2.Анализ нелинейного режима работы системы ЧАП

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
