
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() Расчетные величины относительной нестабильности представлены в табл. 10.1. Выполнение этого условия позволит в формуле для расчета динамической ошибки слежения учитывать нестабильность задающего генератора.
Расчетные величины относительной нестабильности представлены в табл. 10.1. Выполнение этого условия позволит в формуле для расчета динамической ошибки слежения учитывать нестабильность задающего генератора.
Результаты расчета показывают, что приемлемая точность может быть достигнута при относительной нестабильности ![]() , что может быть обеспечено при использовании LC-генераторов.
, что может быть обеспечено при использовании LC-генераторов.
Если частота эталонного сигнала меньше предельной частоты переключения элементной базы, цифровой управляемый генератор может быть выполнен по комбинированной схеме с использованием делителя. При этом увеличением дискрета подстройки снижаются требования к стабильности ГОС. Для сохранения заданной величины дискрета подстройки пропорционально увеличивается частота ЗГ и ГОС и производится последующее деление опорного сигнала до частоты эталонного.
Таким образом, использование метода временной трансформации позволяет значительно (в десятки раз) расширить частотный диапазон работы ЦСФС.
Таблица.10.1
Зависимость допустимых значений относительной нестабильности синхронизируемых генераторов от величины дискрета подстройки по фазе.![]()
№ п/п |
|
|
1 |
| 3*10-5 |
2 |
| 2*10-4 |
3 |
| 4,8*10-4 |
4 |
| 1,9*10-3 |
10.8. Примеры реализации цифровых следящих систем
В качестве примеров рассмотрим схемы цифровых систем ФАПЧ с астатизмом второго порядка, реализующие методы дискретного управления фазой и дискретного управления частотой.
Схема ЦФАПЧ с дискретным управлением фазой приведена на рис. 10.30.
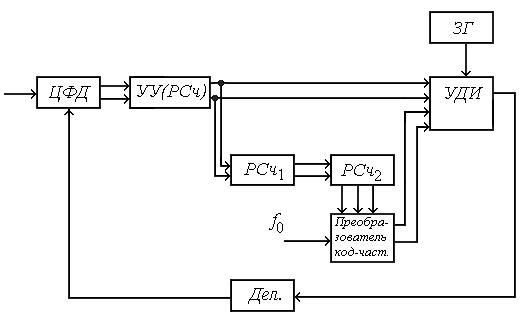
Рис. 10.30. Схема ФАПЧ с дискретным управлением фазой
Система состоит из двух колец регулирования: пропорционального и интегрирующего, Интегрирующее включает реверсивные счетчики РСч1 и РСч2 и преобразователь код-частота. Расстройка между частотой входного и опорного сигналов приводит к преобладанию импульсов счетно - импульсного кода на одном из выходов ЦФД. В результате этого реверсивный счетчик УУ будет переполняться по одному из входов и на вход интегратора РСч1,РСч2 будут поступать импульсы переполнения. В интеграторе накопится код, пропорциональный частотной расстройке. Этот код является управляющим для преобразователя код-частота. В результате на выходе ПКЧ сформируется последовательность импульсов с постоянной частотой, пропорциональной частотной расстройке. Имульсы поступают на УДИ и осуществляют коррекцию частоты опорного сигнала, равную в установившемся режиме первоначальной частотной расстройке. В качестве ПКЧ может быть использован цифровой синтезатор частот с суммированием импульсных последовательностей (рис. 10.31).
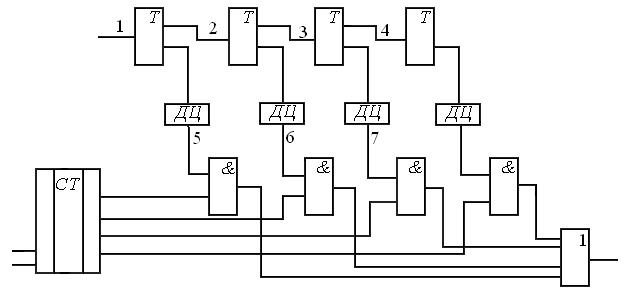
Рис. 10.31. Схема цифрового синтезатора частот с суммированием импульных последовательностей: ДЦ – дифференцирующая цепь.
Цифровая схема ФАПЧ с дискретным управлением частотой приведена на рис.10.32.
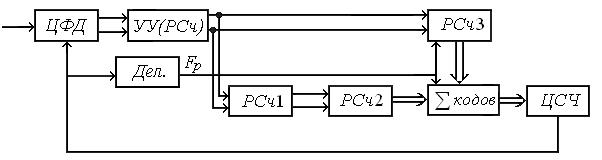
Рис.10.32. Схема ФАПЧ с дискретным управлением частотой
Сумматор кодов содержит полный код частоты, который управляет частотой цифрового синтезатора частоты. Реверсивный счетчик 2 постоянно подключен к сумматору кодов, а РС 3 периодически подключается к сумматору и его код переписывается в сумматор, а затем сбрасывается (запись и сброс производится импульсом с делителя).
Таким образом, информация РС 3 обновляется каждый период (с частотой регулирования![]() ). Сумматор кодов должен обладать памятью, т. е. является сумматором накапливающего типа.
). Сумматор кодов должен обладать памятью, т. е. является сумматором накапливающего типа.
11. Поиск сигнала. Задачи и методы поиска
При включении системы между текущим параметром, за которым осуществляется слежение и оценкой этого параметра на выходе системы сушествует рассогласование, превышающее полосу захвата, и система не может сама перейти в режим слежения. Чтобы перейти в режим слежения надо определить оценку параметра с точностью, обеспечивающей захват.
Так, в системе ФАПЧ ширина дискриминационной характеристики охватывает весь диапазон возможных значений фазового рассогласования, но, если частота сигнала будет вне полосы захвата, то необходимо производить поиск по частоте.
Следовательно, этапу слежения должен предшествовать поиск по параметрам. При работе в шумах может произойти срыв слежения, чтобы его возобновить необходимо также производить поиск. Таким образом, для нормальной работы следящей системы последняя должна быть дополнена устройством поиска.
Существуют различные методы поиска:
- параллельный поиск;
- последовательный поиск;
- многоэтапный поиск.
При последовательном поиске последовательно аннализируется диапазон возможных значений отслеживаемого параметра.
При параллельном поиске весь диапазон возможных значений параметра разбивается на отрезки, ширина этих отрезков выбирается из условия обеспечения необходимой точности оценки отслеживаемого параметра, таким образом, чтобы при условии определения наличия сигнала в данной ячейке (отрезке), система была способна перейти в режим слежения. Параллельный поиск осуществляется с помощью многоканальных устройств.
ЛИТЕРАТУРА
1. Коновалов : Учебник для вузов. – М.: Высш. шк., 1990.
2. Первачев : Учебник для вузов. – М.: Радио и связь, 1982.
3. Радиоавтоматика: Учебн. пособие для студ. вузов спец. Радиотехника»/
Под ред. .– М.: Высш. шк., 1985.
4. Цифровые системы фазовой синхронизации/ Под ред. – М.: Сов. радио, 19805. , Попов систем автоматического регулирования. – М.: Наука, 1975.
6. Артемьев пособие по методам исследования радиоэлектронных следящх систем. – Мн.: Выш. шк., 1984.
7. М Локационные системы роботов: Справочное пособие. – Мн.: Выш. шк., 1988.
8. И, , Самойленко кибернетика: Учебник для радиотехнических вузов – М.: Сов. радио, 1969.
СОДЕРЖАНИЕ
1. Общая характеристика систем радиоавтоматики (РА) 2
1.1. Понятие систем РА.. 2
1.2. Принципы построения и классификация систем РА.. 2
2. Описание систем РАдиоавтоматики.. 5
2.1.Система частотной автоподстройки (ЧАП) 5
2.1.1 Функциональная схема. 5
2.2. Система фазовой автоподстройки частоты (ФАПЧ) 10
2.2.1. Функциональная схема. 10
2.2.2. Математическое описание работы системы. Структурная схема. 10
2.3. Система слежения за временным положением импульсного сигнала. 13
2.3.1. Функциональная схема. 13
2.3.2. Математическое описание. Структурная схема системы слежения за временным положением. 15
2.4. Система слежения за направлением прихода радиосигнала. 18
2.5. Обобщенные функциональная и структурная схемы радиотехнических следящих систем. 20
2.6. Системы автоматической регулировки усиления (АРУ) 23
3. Математические методы описания линейных стационарных непрерывных систем... 26
3.1.Общая характеристика методов. 26
3.2. Использование дифференциальных уравнений. 26
3.3. Использование передаточных функций. 27
3.4. Использование переходной и весовой функций. 28
3.5. Использование частотных передаточных функций. 30
3.6. Использование логарифмических частотных характеристик. 32
3.7. Передаточные функции следящих систем. 35
3.8. Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы.. 37
3.9. Типовые динамические звенья следящих систем. 37
4. Устойчивость радиоэлектронных следящих систем... 48
4.1 Понятие устойчивости. 48
4.2.Алгебраические критерии устойчивости. 49
4.3.Частотные критерии устойчивости. 50
4.4.Определение устойчивости с помощью ЛАЧХ разомкнутой системы.. 53
4.5. Абсолютно и условно устойчивые системы.. 54
5. Анализ качественных характеристик следящей системы 58
5.1.Показатели качества следящей системы.. 58
5.2. Анализ установившейся (динамической) ошибки. 59
5.3. Понятие астатизма системы.. 61
5.4. Методы вычисления коэффициентов ошибки. 62
5.5. Динамические ошибки в следящих системах с астатизмом различного порядка 63
6. Анализ случайных процессов в линейных системах радиоэлектронных следящих системах.. 67
6.1.Определение статистических характеристик случайных процессов в линейных системах. 67
6.2.Расчет дисперсии случайного процесса с помощью стандартных интегралов 68
6.3.Эквивалентная шумовая полоса следящих систем. 72
6.4.Оптимизация параметров следящих систем. 73
6.5. Память следящих систем. 75
7. Проектирование систем радиоавтоматики.. 78
7.1. Постановка задачи. 78
7.2. Определение желаемой ПФ разомкнутой системы.. 79
7.3. Методы коррекции передаточных функций. 82
7.4. Типы параллельных и последовательных корректирующих звеньев. 83
8. Нелинейные системы радиоавтоматики.. 90
8.1. Методы исследования нелинейных систем. 90
8.2.Анализ нелинейного режима работы системы ЧАП.. 91
8.3. Метод фазовой плоскости. 95
8.4. Метод статистической линеаризации. 102
8.5. Метод гармонической линеаризации. 105
8.5.1. Основы метода. 105
8.5.2. Расчет автоколебаний по критерию Найквиста. 107
9. Дискретные системы радиоавтоматики.. 110
9.1. Системы с прерывистым входным сигналом. Функциональные схемы.. 110
9. 2. Структурные схемы систем. 112
9.3. Математическое описание дискретных систем. 115
9.3.1. Z-преобразование и его свойства. 115
9.3.2. Передаточные функции дискретных систем. 117
9.3.3. Разностные уравнения. 118
9.3.4. Операторный коэффициент передачи дискретной системы.. 119
9.3.5. Комплексный коэффициент передачи дискретной системы.. 119
9.3.6. Устойчивость дискретных систем. 120
9.3.7.Анализ детерминированных процессов в дискретных системах. 122
9.3.8. Анализ случайных процессов дискретных систем. 123
10. Цифровые системы радиоавтоматики.. 124
10.1.Общая характеристика цифровых систем. 124
10.2. Аналого-цифровая следящая система. 124
10.3. Цифровые временные дискриминаторы.. 126
10.4. Цифровые фазовые дискриминаторы.. 128
10.5. Цифровые частотные дискриминаторы.. 131
10.6. Цифровые фильтры.. 133
10.7. Цифровые генераторы опорного сигнала. 136
10.8. Примеры реализации цифровых следящих систем. 147
11. Поиск сигнала. Задачи и методы поиска.. 149

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
