
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.6.6. Провести анализ полученных результатов:
- объяснить характер полученных зависимостей;
- провести анализ частотных свойств детекторов;
- сравнить коэффициенты передач различных типов детекторов.
3.7. Содержание отчета по лабораторной работе
1. Название работы.
2. Цель работы.
3. Описание эксперимента и схемы исследуемых цепей.
4. Результаты эксперимента (расчеты, таблицы, графики зависимостей, диаграммы).
5. Анализ результатов (сравнение экспериментальных результатов с расчетными и теорией).
6. Выводы по работе.
3.8. Контрольные вопросы и задания
1. Назначение амплитудного детектора в радиоприемных устройствах.
2. Основные характеристики амплитудных детекторов.
3. Назначение элементов схемы диодного детектора.
4. Методы анализа работы амплитудного детектора.
5. Чем отличается детектирование в режиме «слабых» и «сильных» сигналов?
6. Чем определяется выбор параметров элементов нагрузки диодного детектора?
7. Как уменьшить нелинейные искажения в диодном детекторе?
8. Перечислите основные преимущества транзисторных детекторов.
9. Принцип действия синхронных детекторов.
10. Укажите основные достоинства и недостатки синхронного детектирования.
Лабораторная работа № 4
АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ
Цель работы: экспериментальное исследование процесса автоматической регулировки усиления в усилителе промежуточной частоты (УПЧ): определение амплитудных характеристик различных систем автоматической регулировки усиления (АРУ) с обратным регулированием (простой АРУ и АРУ с задержкой и усилением); определение регулировочных характеристик при различных коэффициентах усиления в петле обратной связи; определение коэффициентов регулирования при различных коэффициентах усиления в петле обратной связи; определение переходных характеристик системы АРУ в динамическом режиме.
4.1. Краткие теоретические сведения
Системой АРУ называется система автоматического регулирования, обеспечивающая устранение перегрузок в каскадах устройств приема и обработки сигналов и поддерживающая заданное постоянство выходного напряжения в условиях изменения амплитуды входных сигналов.
Уровень сигнала на входе усилительно-преобразовательного тракта радиоприемного устройства обычно изменяется в широких пределах. Желательно, чтобы напряжение на выходе этого тракта изменялось незначительно и обеспечивало оптимальный режим работы демодулятора или обнаружителя сигналов. Эта задача может быть решена при использовании системы автоматической регулировки усиления, следящей за изменением амплитуды сигнала на входе.
По характеру выполняемых задач системы АРУ делятся на три группы:
-инерционные, следящие за изменением среднего уровня входного сигнала, применяемые обычно в радиовещательных приемниках;
-безынерционные, следящие за изменением мгновенного значения амплитуды входного сигнала, применяемые, например, в радиолокационных устройствах;
-программные, с заранее заданным временным законом регулировки, используемые при приеме сигналов с известным, периодически повторяющимся распределением во времени.
Системы АРУ могут быть построены по принципу обратного, прямого и комбинированного регулирования при аналоговой и цифровой реализациях.
Обратная система АРУ (рис. 4.1, а) является наиболее простой и эффективной. Она представляет собой замкнутую нелинейную цепь АРУ, содержащую усилительный канал радиоприемного устройства (РПрУ) с регулируемым коэффициентом усиления и цепь регулирования.
Для получения регулирующего напряжения Uрег цепь АРУ в обязательном порядке должна включать амплитудный детектор (АД), фильтр низких частот (ФНЧ) и усилитель постоянного тока (УПТ). Напряжение на выходе АД цепи АРУ UАД пропорционально амплитуде Umвых напряжения на выходе регулируемого усилительного канала радиоприемника. ФНЧ цепи АРУ отфильтровывает составляющие частот модуляции и пропускает медленно меняющиеся составляющие напряжения UАД. Фильтр устраняет обратную связь по промежуточной частоте в регулируемом усилителе.
Особенностью обратной системы АРУ является то, что она не позволяет получить идеальной характеристики регулирования, т. е. поддержания постоянного выходного напряжения в широком диапазоне изменений уровня выходных колебаний. Причина этого заключается в том, что для получения управляющего напряжения используется приращение выходного напряжения регулируемого усилительного канала РПрУ.
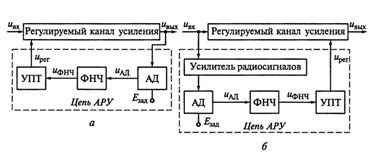
Рис. 4.1. Структурная схема обратной (а) и прямой (б) систем АРУ
При прямой системе АРУ (рис. 4.1, б) управляющее коэффициентом усиления напряжение Uрег формируется из входного сигнала регулируемого канала с помощью цепи, включающей дополнительный усилитель с большим коэффициентом усиления, АД, ФНЧ и УПТ. При увеличении Uвх напряжение на выходе детектора АРУ возрастает, при этом увеличивается Uрег, что вызывает уменьшение резонансного коэффициента К0. Нестабильность параметров основного и дополнительного усилителей приводит к неустранимым системой изменениям уровня выходного сигнала, поскольку такая система лишена обратной связи.
Прямая система АРУ теоретически может обеспечивать идеальную характеристику регулирования, а также наибольшее быстродействие. Ей свойственны недостатки:
-необходимость включения в цепь АРУ дополнительного усилителя высокочастотных колебаний с большим коэффициентом усиления, способного перегружаться от входного сигнала;
-необходимость высокой стабильности параметров дополнительного усилителя;
-подверженность действию дестабилизирующих факторов (изменения температуры, напряжения источника питания и др.)
Комбинированная система АРУ, структурная схема которой представлена на рис. 4.2, является сочетанием систем двух ранее рассмотренных типов АРУ. В комбинированной системе АРУ рационально используются преимущества обеих систем, а именно стабильность обратной АРУ и возможность получения идеальной характеристики регулирования в прямой АРУ. Основная регулировка в комбинированной системе АРУ производится в первом регулируемом усилительном канале, который, как правило, включает в себя несколько регулируемых каскадов. Второй регулируемый усилительный канал (чаще всего один каскад) компенсирует возрастание напряжения на выходе первого усилительного канала.
В зависимости от требований к системе АРУ в ее схемной реализации могут отсутствовать отдельные узлы в цепи автоматической регулировки. В связи с этим различают несколько типов цепей АРУ.
В системе простой АРУ отсутствуют усилители в цепи регулирования, а напряжение задержки срабатывания Езад = 0.
В системе АРУ с задержкой уровня срабатывания отсутствуют усилители в цепи АРУ. При увеличении амплитуды входного высокочастотного сигнала Umвх на выходе регулируемого усилительного канала возрастает амплитуда напряжения Umвых. Если амплитуда Umвых не превышает уровня срабатывания Езад, то на выходе детектора АРУ напряжение отсутствует, т. е. UАД = 0. Только при превышении амплитудой Umвых установленного уровня срабатывания Езад на выходе детектора АРУ появляется напряжение Uфнч. После фильтрации в основном фильтре АРУ это напряжение подводится к регулируемым каскадам усилительного канала. В результате этого коэффициент усиления канала уменьшается. Таким образом, в системе АРУ с задержкой коэффициент усиления радиоприемника не меняется до тех пор, пока амплитуда выходного напряжения Umвых не превысит уровня срабатывания Езад, т. е. осуществляется задержка срабатывания системы АРУ по уровню амплитуды несущего колебания выходного напряжения.
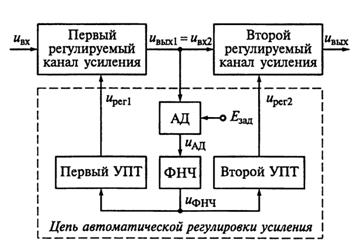
Рис. 4.2. Структурная схема комбинированной системы АРУ
В системе АРУ с усилением присутствует УПТ в цепи АРУ, а напряжение задержки срабатывания Езад = 0. Эта система АРУ позволяет значительно сузить пределы изменения выходного сигнала.
Система АРУ с усилением и задержкой уровня срабатывания включает в себя все элементы систем АРУ, схемы которых показаны на рис. 4.1. Эта система АРУ позволяет работать в широком динамическом диапазоне входных сигналов и при высоких требованиях к стабильности выходных сигналов.
Различают системы АРУ с непрерывным и дискретным регулированием.
В системах АРУ с непрерывным регулированием изменение коэффициента усиления канала носит непрерывный характер.
В системах АРУ с дискретным регулированием (цифровые АРУ) коэффициент усиления каскада изменяется по ступенчатому закону, т. е. принимает определенные дискретные значения. Такие системы АРУ выполняются на логических элементах, поэтому они технологичны в производстве и обладают идентичностью характеристик.
Основными характеристиками системы АРУ являются следующие – коэффициент регулирования, время установления, амплитудная характеристика, регулировочная характеристика.
Коэффициент регулирования γ, равный отношению динамического диапазона α изменений уровня входного сигнала к допустимому динамическому диапазону β изменений уровня выходного сигнала:
γ = α/β, (4.1)
где α = Umвхmax / Umвхmin ,
β = Umвыхmax / Umвыхmin ,
Umвхmax и Umвхmin – значения максимальной и минимальной амплитуды входного сигнала усилителя,
Umвыхmax и Umвыхmin – значения максимальной и минимальной амплитуды выходного сигнала усилителя.
Значение γ часто задается в децибелах:
![]() , (4.2)
, (4.2)
Время установления tу – интервал времени от момента включения входного сигнала при Uтвх = Uтвхmax до момента времени, когда амплитуда выходного напряжения достигает величины, отличающейся от установившегося значения не более чем на 10 %.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
