

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
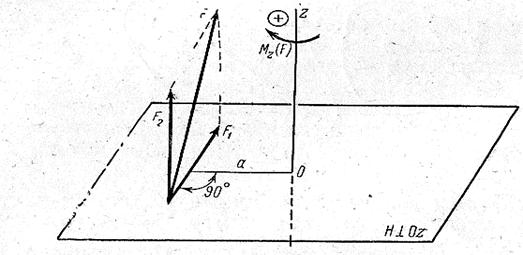
Пусть на тело в какой-то точке (рисунок 9) действует сила ![]() .
.  Проведем плоскость Н, перпендикуляр-ную Оси Оz и проходящую через начало вектора силы. Разложим заданную силу F на две составляющие:
Проведем плоскость Н, перпендикуляр-ную Оси Оz и проходящую через начало вектора силы. Разложим заданную силу F на две составляющие: ![]() расположенную в плоскости Н, и
расположенную в плоскости Н, и ![]() параллельную оси Ог. Составляющая
параллельную оси Ог. Составляющая ![]() параллельная оси Oz, момента относительно этой оси не создает. Составляющая
параллельная оси Oz, момента относительно этой оси не создает. Составляющая ![]() действующая в плоскости Н, создает момент Относительно оси Ог или, что то же самое Относительно точки О. Момент силы
действующая в плоскости Н, создает момент Относительно оси Ог или, что то же самое Относительно точки О. Момент силы ![]() из- меряется произведением модуля самой силы на длину а перпендикуляра, опущенного из точки О на направление этой силы, т. е.
из- меряется произведением модуля самой силы на длину а перпендикуляра, опущенного из точки О на направление этой силы, т. е.
![]() (9)
(9)
|
Следовательно, для определения момента силы относительно оси нужно спроецировать силу на плоскость, перпендикулярную оси, и найти момент проекции силы относительно точки пересечения оси с этой плоскостью.
Лекция 3
Тема: «Произвольная плоская система сил. Основная теорема статики. Виды опор балочных систем»
Вопрос 1. Приведение силы к точке.
Рассмотрим случай переноса силы в произвольную точку, не лежащую на линии действия силы (рисунок 10).
Возьмем силу F, приложенную в точке С. Требуется перенести эту силу параллельно самой себе, в некоторую точку О. Приложим в точке О две силы F′ и F′′ , противоположно направленные, равные по значению и параллельные заданной силе, т. е. F′ = F′′ = F. От приложения в точке О этих сил состояние тела не изменяется, та как они взаимно уравновешиваются. Полученную систему трех сил можно рассматривать как состоящую из силы F′, приложенной в точке О, и пары сил FF′′ с моментом М=F·а. Эту пару сил называют присоединенной, а ее плечо а равно плечу силы F относительно точки О.
 Таким образом, при приведении силы F к точке, не лежащей на линии действия силы, получается эквивалентная система, состоящая из силы, такой же по модулю и направлению, как сила F и присоединенной пары сил, момент которой равен моменту данной силы относительно точки приведения:
Таким образом, при приведении силы F к точке, не лежащей на линии действия силы, получается эквивалентная система, состоящая из силы, такой же по модулю и направлению, как сила F и присоединенной пары сил, момент которой равен моменту данной силы относительно точки приведения:
МО(F) = F∙ а (10)
Вопрос 2. Приведение плоской системы сил к данной точке.
Допустим что в точках тела А, В, С, и D приложены силы F1, F2, F3 и F4 (рисунок 11). Требуется привести эти силы к точке О плоскости. Приведем сначала силу F1, приложенную в точке А. Приложим в точке О две силы F′1 и F′′1, равные порознь по значению заданной силе F1, параллельные ей и направленные в противоположные стороны. В результате приведения силы F1 получим силу F′1, приложенную в точке О, и пару сил F1′ F1′′ с плечом а1. Поступив таким же образом с силой F2, приложенной в точке В, получим силу F2, приложенную в точке О, и пару сил с плечом а2 и т. д.
Плоскую систему сил, приложенных в точках А, В, С и D, мы заменили сходящимися силами F1, F2, F3 и F4, приложенными в точке О, и парами сил с моментами, равными моментам заданных сил относительно точки О:
М1 = F1∙ а1 = МО(F1); М1 = - F2∙ а2 = МО(F2);
М3 = F3∙ а3 = МО(F3); М4 = - F4∙ а4 = МО(F4).
 |
Сходящиеся в точке силы можно заменить одной силой R, равной геометрической сумме составляющих,
 R = F1′+F2′ +F3′+F4′ = F1 + F2+ F3+ F4 = ∑ Fi (11)
R = F1′+F2′ +F3′+F4′ = F1 + F2+ F3+ F4 = ∑ Fi (11)
Эту силу, равную геометрической сумме заданных сил, называют главным вектором системы сил и обозначают R.
На основании правила сложения пар сил их можно заменить результирующей парой, момент которой равен алгебраической сумме моментов заданных сил относительно точки о и называется главным моментом относительно точки приведения
L= M1+M2 +M3+M4 = ∑ МО(Fi) (12)
Следовательно, в общем случае плоская система сил в результате приведения к данной точке О заменяется эквивалентной ей системой, состоящей и з одной силы (главного вектора) и одной пары (главного момента).
Вопрос 3 Теорема Вариньона.
Момент равнодействующей плоской системы сил относительно произвольно взятой точки равен алгебраической сумме моментов составляющих сил относительно той же точки.
МО(F∑) =∑ МО(Fi) (13)
Из теоремы следует, что главный момент плоской системы сил относительно любой точки, лежащей на линии действия ее равнодействующей, равен нулю.
Вопрос 4. Опорные устройства балочных систем.
Очень часто в машинах и конструкциях встречаются тела удлиненной формы, называемые балками (или балочными системами). Балки в основном предназначены для восприятия поперечных нагрузок. Балки имеют специальные опорные устройства для сопряжения их с другими элементами и передачи на них усилий. Применяются следующие виды опор.
Шарнирно-подвижная опора (рисунок 12, а). Такая опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. В этой опоре известны точка приложения опорной реакции - центр шарнира и ее направление - перпендикуляр к опорной плоскости. Здесь остается неизвестным числовое значение опорной реакции RA.
Следует отметить, что опорная поверхность шарнирно-подвижной опоры может быть непараллельная оси балки (рисунок 12, б). Реакция RA в этом случае не будет перпендикулярна оси балки, так как она перпендикулярна опорной поверхности.
Шарнирно-неподвижная опора (рисунок 12, в) . Эта опора допускает поворот вокруг оси шарнира, но не допускает никаких линейных перемещений.
В данном случае известна только точка приложения опорной реакции - центр шарнира; направление и значение опорной реакции неизвестны. Обычно вместо определения значения и направления (полной) реакции ![]() находят ее составляющие
находят ее составляющие ![]() и
и ![]()
Жесткая заделка (защемление) (рисунок 12, г). Такая опора не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только значение и направление реакции, но и точка ее приложения. Поэтому жесткую заделку заменяют силой реакции ![]() и парой сил с моментом
и парой сил с моментом ![]()
Для определения опорной реакции следует найти три неизвестных: составляющие ![]() и
и ![]() опорной реакции по осям координат и реактивный момент
опорной реакции по осям координат и реактивный момент ![]() .
.
|
Лекция 4
Тема: «Уравнения равновесия различных систем сил. Три формы уравнений равновесия произвольной плоской системы сил»
Вопрос 1 Уравнения равновесия плоской системы сходящихся сил

(14)
Рассматриваемая система сходящихся сил находится в равновесии, когда алгебраические суммы проекций ее слагаемых на каждую из двух координатных осей равны нулю
Вопрос 2. Уравнения равновесия плоской системы сил.
Плоская система сил может быть приведена к главному вектору и главному моменту. Поэтому условия равновесия сил на плоскости, как показано выше, имеют вид:
(15)
Итак, для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю.
Уравнения равновесия произвольной плоской системы сил могут быть представлены в трех формах.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
