

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531.383
В. В. ЧЕРЁМУХИН
(АО «ГИРООПТИКА» С.-Петербург)
ИССЛЕДОВАНИЕ ТЕХНИЧЕСКИХ РЕШЕНИЙ ПО ПОВЫШЕНИЮ ВИБРОСТОЙКОСТИ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ
Рассмотрены технические решения по повышению вибростойкости микромеханических гироскопов, функционирующих в жёстких условиях эксплуатации. Приведена схема двухмассового чувствительного элемента, приведены результаты моделирования с использованием конечно-элементного анализа.
Микромеханическими преобразователями параметров движения являются устройства, предназначенные для восприятия и преобразования линейного ускорения или угловой скорости в выходной сигнал. [1]
Микромеханические гироскопы (ММГ) относятся к перспективным приборам современной микросистемой техники, повышение точности и надежности технических характеристик приборов данного типа — актуальная научно-техническая проблема гироскопии [2,3,4]. Приборы этого типа характеризуются уникально малыми массой и габаритами, малым потреблением электроэнергии, низкой себестоимостью и, вместе с тем, возможностью функционирования в жестких условиях эксплуатации. Микромеханические датчики параметров движения, в частности такие как ММГ, позволяют создавать малогабаритные инерциальные навигационные системы, предназначенные для выработки параметров ориентации и навигационных параметров высокоскоростных высокоманевренных объектов и подвижных объектов других классов. [1] Приборы низкой стоимости (до 100 долларов), значения погрешности которых лежат в диапазоне 10-1000°/ч, широко применяются во многих областях, в таких как медицина, энергетика, автомобилестроение.[5,6] Современные ММГ, серийно выпускаемые зарубежными фирмами (Analog Devices [7], Honeywell[8] (США), ST Microelectronics[9] (Швейцария) и другие), опытные образцы приборов данного типа, созданные российскими предприятиями (ГНЦ РФ «Концерн «ЦНИИ Электроприбор»[10], [11]) относятся к приборам класса точности 1÷10°/ч. При расширении возможностей использования ММГ на различных подвижных объектах, в том числе на высокодинамичных, рассмотрение вопросов обеспечения стойкости ММГ при механических воздействиях весьма актуально. Одной из ключевых проблем является задача увеличения стабильности выходных характеристик приборов такого типа [3].
Для ММГ L-L типа основным воздействием, определяющим погрешности прибора на подвижных объектах, является линейная вибрация основания в широком диапазоне частот, особенно на частотах собственных колебаний. Резонансные явления при вибрационных воздействиях потенциально представляют большую опасность вследствие высокой добротности колебательной системы ММГ. [12,13] При вибрационных испытаниях ММГ обнаруживается возбуждение интенсивных колебаний чувствительных элементов в области собственных частот чувствительного элемента. [14]
К способам повышения вибростойкости относятся:
- Использование двухмассовых схем чувствительных элементов (ЧЭ);
____________________________
Научный руководитель д. ф-м. н., проф.,
-Выбор спектра собственных частот чувствительного элемента выше спектра частот вибрационных воздействий;
- Использование сложных систем подвеса фрагментов чувствительного элемента;
- Комплексирование чувствительного элемента с дублирующим чувствительным элементом, реализация взаимного дифференциального съёма выходного сигнала. [12,13]
Схема и принцип действия ММГ с двухмассовым чувствительным элементом приведены в патенте [15].

Рисунок 1. Схема двухмассового чувствительного элемента
1-основание, 2-внутренняя инерционная масса, 3-упругие перемычки, 4-измерительная планка, 5-места приварки ЧЭ к основанию, 6-датчики перемещений по оси вторичных колебаний, 7-электростатические датчики силы контура подстройки частот вторичных колебаний, 8-электростатические виброприводы, 9-датчики перемещений по оси первичных колебаний, 10,11-наружные рамки, 12-коромысла, 13-упругие перемычки.
Конструкция ЧЭ содержит две инерционные массы, связанные между собой упругими перемычками 13, каждая из которых содержит в себе наружную рамку 10 и 11 и внутреннюю инерционную массу 2, подвешенные на упругих перемычках 3 в рамке, которая, в свою очередь, упругими перемычками связана с корпусом прибора. Конструкция упругого подвеса обеспечивает перемещение наружных рамок 10 и 11 вместе с инерционными массами 2 вдоль оси X (первичные колебания), и инерционных масс 2 относительно рамок 10 и 11 — вдоль оси Y (вторичные колебания). Ось чувствительности ММГ ортогональна плоскости основания. В конструкции прибора предусмотрена система вибровозбуждения 8 чувствительного элемента ММГ и контур подстройки частот 7. Электростатические виброприводы 8 приводят инерционные массы в противофазное движение вдоль оси ОХ. При возникновении угловой скорости, под воздействием сил инерции Кориолиса, внутренние инерционные массы 2 начинают совершать вторичные линейные колебания вдоль оси OY. Энергия вторичных колебаний через упругие перемычки и коромысла передаётся на измерительные планки 4, содержащие электроды датчиков перемещения 6. Амплитуда колебаний измерительных планок и ёмкость датчиков перемещений пропорциональны величине измеряемой угловой скорости.
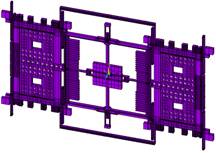
Выбор параметров ММГ так, чтобы спектр собственных частот ЧЭ был расположен выше частот вибрационного воздействия позволит избежать возникновения резонансных явлений в работе ММГ. Варьировать спектр собственных частот возможно путём изменения геометрических параметров упругого подвеса и инерционных масс. Проектирование конструкции ЧЭ ММГ осуществлено на основе программного пакета конечно-элементного анализа. Геометрическая и конечно-элементная модели ЧЭ ММГ представлены на рисунках 2 и 3.
|
|
Рисунок 2. Геометрическая модель ЧЭ ММГ | Рисунок 3. Конечно-элементная модель ЧЭ ММГ |
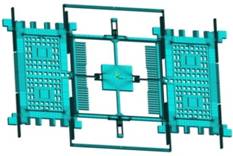
При построении конечно-элементной модели ЧЭ использован восьмиузловой конечный элемент, позволяющий учитывать свойства анизотропии SOLID64.
Собственные частоты конструкции ЧЭ ММГ приведены в таблице 1, а соответствующие им формы колебаний представлены на рисунке 4.
Таблица 1. Собственные частоты конструкции ЧЭ ММГ.
№ п/п. | 1 | 2 | 3 | 4 |
Частота, Гц | 4943.0 | 7059.5 | 7163.7 | 10149.0 |
А) 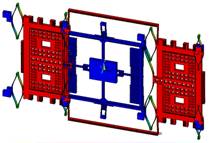 Б)
Б) 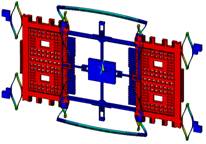
В)  Г)
Г) 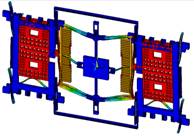
Рисунок 4. Собственные формы колебаний конструкции ЧЭ ММГ
(А – первая собственная форма, Б – вторая собственная форма, В – третья собственная форма, Г – четвёртая собственная форма)
Примеры использования сложной системы упругих связей фрагментов чувствительного элемента можно видеть на примере ММГ производства фирм HSG-IMIT (Германия)[16] и Thales Avionics (Франция) [17]. Идеи подвешивания инерционных масс в рамках, а так же присутствие фрагментов, имеющих степень свободы в направлении только одной из осей колебаний, реализованные в данных гироскопах нашли своё применение в рассмотренной ранее конструкции ЧЭ.
А)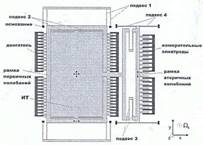 Б)
Б) 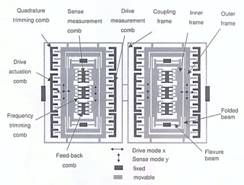
Рисунок 5. Примеры использования сложных систем подвеса фрагментов чувствительного элемента
А-гироскоп фирмы HSG-IMIT (Германия), Б-гироскоп фирмы Thales Avionics (Франция)
Моделирование, проведённое с использованием метода конечных элементов, подтверждает эффективность вышеупомянутых способов повышения вибростойкости ММГ. Были проведены расчёты реакции внутренних инерционных масс (ВИМ) и измерительных планок (ИП), входящих в конструкцию ЧЭ на вибрационные воздействие в диапазоне 0-2000Гц в направлении осей ОХ и OY. Диапазон вибрационных воздействий 0-2000Гц наиболее часто встречается в технических заданиях на проектирование ММГ. Результаты расчётов приведены на рисунках 6 и 7.
|
|
Рисунок 6. Амплитудно-частотные характеристики при вибрационное воздействии по оси ОХ | Рисунок 7. Амплитудно-частотные характеристики при вибрационное воздействии по оси ОY |
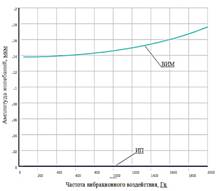

По результатам расчётов видно, что измерительные планки значительно меньшую амплитуду колебаний под воздействием вибрации, что доказывает эффективность данного способа повышения вибростойкости.
Одним из способов уменьшения влияния вибрационных воздействий на ММГ является комплексирование чувствительного элемента с дублирующим чувствительным элементом и реализация взаимного дифференциального съёма выходного сигнала.
Схема комплексирования чувствительного элемента с дублирующим чувствительным элементом (ДЧЭ), реализация взаимного дифференциального съёма выходного сигнала представлены на рисунке 8.
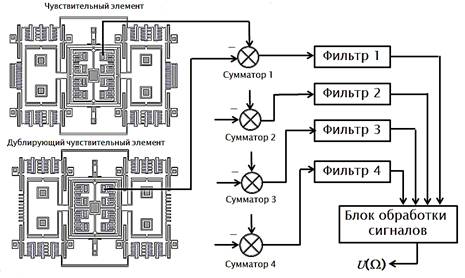
Рисунок 8. Комплексирование чувствительного элемента с дублирующим чувствительным элементом
Принцип работы заключается в следующем. При включении ММГ, в чувствительном элементе возбуждаются первичные линейные колебания, электростатический контур подстройки частоты вторичных колебаний так же включён в работу. У дублирующего чувствительного элемента отсутствуют электростатические виброприводы и возбуждение первичных колебаний не предусмотрено. Электростатический контур подстройки частот работает идентично у обоих чувствительных элементов. Съём сигнала с датчиков перемещений по оси вторичных колебаний осуществляется в обоих случаях в соответствии с принципом действия рассмотренным ранее. Взаимный дифференциальный съём реализуется следующим образом: из сигнала с датчика перемещений по оси вторичных колебаний ЧЭ вычитается сигнал с соответствующего ему, имеющем такую же ориентацию, датчика перемещений ДЧЭ, как показано на рисунке 8. Данная разность реализуется столько раз, сколько предусмотрено датчиков перемещений в конструкции ЧЭ. В рассматриваемом случае предполагается получение четырёх разностей с пар соответствующих датчиков. Полученные разности, пройдя через фильтр, попадают в блок обработки сигналов, на выходе которого формируется выходной сигнал пропорциональный измеряемой угловой скорости. Зазоры и связанные с ними ёмкости в датчиках перемещений чувствительного элемента будут изменяться как при воздействии измеряемой угловой скорости, так и внешних воздействий, в то время как аналогичные зазоры в ДЧЭ будут изменяться только под действием внешних воздействий. Разность сигналов с датчиков перемещений пропорциональна измеряемой угловой скорости.
Полученные данные расчётов подтверждают эффективность предложенных методов повышения вибростойкости ММГ. Малые габаритные размеры, низкая стоимость, возможность функционировать в жёстких условиях эксплуатации обеспечивают широкий спектр возможностей применения приборов данного типа на различных высокодинамичных объектах. На данный момент проблема повышения стойкости ММГ к внешним воздействиям остаётся актуальной
Библиографический список
1. , , . Микромеханические инерциальные преобразователи параметров движения и навигационные системы / , , // Тез. докл. Междунар. науч.-техн. конгресса "Мехатроника и робототехника (МиР-2007)". - Санкт-Петербург, 2007.
2. Пешехонов, В. Г. Инерциальные модули на микромеханических датчиках. Разработка и результаты испытаний / [и др.] // Юбилейная XV международная конференция по интегрированным навигационным системам, Сб. материалов, С-Пб., 2008, с. 9-15.
3. Попова, И. В. Капсулированные микромеханические гироскопы и акселерометры для цифровых систем навигации и управления / [и др.] // Юбилейная XV международная конференция по интегрированным навигационным системам, Сб. материалов, С-Пб., 2008, с. 37-44.
4. Лестев А. В. О влиянии нелинейных факторов на динамику ММГ с двухмассовым ЧЭ / , // ИЗВ. ВУЗОВ. ПРИБОРОСТРОЕНИЕ. 2012. Т. 55, № 5 с.40-45.
5. Северов, Л. А. Информационные характеристики микромеханических гироскопов на основе кремниевой технологии / , , // Известия ВУЗов. Приборостроение. 2011, №8. с. 12-22.
6. Распопов, В. Я. Микромеханические приборы: Учебное пособие / ; Москва: Машиностроение. 2007. 402 с.
7. Ошибка! Недопустимый объект гиперссылки.8 http://
9. www.
10.www. elektropribor. spb. ru/
11. www. gyro. ru
12. Вопросы повышения вибростойкости микромеханического гироскопа / , // Гироскопия и навигация, 2011, № 1, стр. 119-133.
13. . Вопросы обеспечения стойкости микромеханических гироскопов при механических воздействиях / , // Гироскопия и навигация №1 (80), 2013, с. 119-133.
14. О пространственной неустойчивости движения чувствительных элементов микромеханических гироскопов / // Сборник докладов научной сессии ГУАП, часть1, с241-246
15. Патент на полезную модель 145145 Российская Федерация, Микроэлектромеханический гироскоп. / , , // опубликован. 10.09.2014. Бюллетень №25.
16. http://www. hsg-mst. de/
17. https://www. /
______________________
Текст доклада согласован с научным руководителем.
Док. ф-м. н., проф., СПбГУАП
![]()
