

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Ближайшее будущее большинства систем ТВ вещания заключается в переходе на цифровые технологии. Первыми примерами цифровых систем передачи ТВ сигналов явились спутниковые линии связи, в которых стал использоваться стандарт сжатия спектра ТВ сигналов MPEG-2, позволяющий по одному стандартному спутниковому каналу передавать несколько ТВ программ при условии их приема в первую очередь головными станциями кабельного телевидения.
Наконец, наметилась тенденция к внедрению наземного цифрового ТВ вещания. Пионерами в данной области ТВ вещания являются США, где Конгрессом принято решение о переходе на полностью цифровую систему вещательного телевидения высокой четкости с прогрессивной разверткой на 1000 строк (в аналоговом ТВ используется развертка на 625 строк) с уплотненным радиоканалом. Создатели новой системы считали, что она должна стать единой мировой системой телевидения. Канада, Япония, а также ряд европейских стран присоединились к этой системе. В России разработана Федеральная программа о развитии телерадиовещания, которая рассчитана на период с 2009 по 2015 год. В рамках программы построены наземные цифровые сети, а также улучшена спутниковая инфраструктура. Введение в эксплуатацию новой ТВ системы обеспечит значительное улучшение качества изображения и звукового сопровождения, позволит телевидению эффективно взаимодействовать с различными цифровыми системами связи и компьютерными сетями. Такие системы позволят каждому абоненту связаться с другим абонентом в любой точке земного шара в видеотелефонном режиме за счет выхода через связной ИСЗ в единую всемирную теле сеть. СКТВ нового поколения - это в большинстве случаев волоконно-оптические системы на 500 и более интерактивных каналов с использованием цифровых методов передачи и сжатия спектра сигналов.
9. ПРАКТИЧЕСКАЯ РАБОТА № 8
Тема: «Алгоритм многостанционного доступа»
Цель работы: Ознакомится с принципами составления алгоритма поиска абонентов сети связи с подвижными объектами.
Общие сведения
В многоканальных системах связи с подвижными абонентами их соединение автоматизировано и осуществляется передачей по радиоканалу специальных сигналов управления. Основная задача, решаемая системой управления, состоит в распределении канального ресурса базовой станции с помощью принятого алгоритма организации соединений.
Канальный ресурс базовой станции - это имеющаяся в ее распоряжении совокупность канальных элементов, обеспечивающих процесс организации соединений, в зависимости от способа разделения канального ресурса. Такими канальными элементами могут быть, например, частотный канал, временное окно, индивидуальный код.
Рассмотрим структуру алгоритмов привязки подвижных абонентов методом радиодоступа к базовым станциям сети, считая канальным элементом частотный канал.
Исследуемая система состоит из одной базовой С-канальной станции и группы из N подвижных С-канальных абонентских радиостанций (ПА). Каналы базовой станции представляют собой полнодоступный пучок (подвижные радиостанции не закреплены за свободными каналами и могут получать для связи любой из С каналов связи). Передача сигналов управления в таких системах может осуществляться как по специально выделенным из имеющегося канального ресурса каналам, так и по каналам, совмещающим функции канала управления и канала связи.
Рассмотрим алгоритмы многостанционного радиодоступа при различных типах каналов управления (КУ).
Главной особенностью алгоритмов привязки подвижных абонентов к базовым станциями при использовании совмещенных каналов управления является то, что каналами управления могут быть все свободные от связи каналы, т. е. канал может выполнять функции канала связи и канала управления.
Использование сигналов управления при организации соединений между подвижным абонентом и базовой станцией, с одной стороны, позваляет упорядочить процесс предоставление абоненту канала связи, а с другой, создает дополнительную нагрузку на системы связи, что увеличивает количество отказов в обслуживании.
Качественную оценку эффективности рассмотреных выше алгоритмов доступа можно привести путем оценки вероятностно – временных характеристик, обеспечиваемых, тем или иных алгоритмом.
Отказ в обслуживании при организации соединений методом радиодоступа при использовании выделенных каналов управления (фиксированный канал управления), когда в локальной системе “базовая станция – подвижный абонент” имеется один фиксированный канал управления и с-1 рабочих каналов связи, определяется вероятностью суммой двух совместных независимых событий: РЗКУ-вероятностью отказов в обслуживании из-за занятости канала управления и РОСКО – вероятностью отказа в обслуживании из-за отсутствия свободных каналов связи.
Рассматривая в отдельности работу канала управления и информационных (трафиковых) каналов и интерпритируя их как одноканальную (типа М/М/1) и с-1 канальную (типа М/М/m) системы массового обслуживания, с помощью формулы потерь Эрланга (В – формул Эрланга), можно получить выражение для РЗКУ и РОСКО. Формула потерь Эрланга выведена в предположении, что интенсивность поступления вызовов не зависит от числа занятых линий. В действительности же по мере роста числа занятых линий уменьшается число свободных абонентов, а значит и интенсивность поступления вызовов. Этим можно пренебречь, если число абонентов N столь велико, что уменьшение его на величину с практически не влияет на интенсивность вызовов.
Аналогичен подход к определению вероятностно-временных характеристик обслуживания при использовании алгоритма доступа с выделенным каналом управления (без его фиксирования на конкретном канале). Вероятность отказа абоненту в обслуживании при организации соединений такого рода вычислений при условии, что в данной системе все с каналов могут быть трафиковыми.
Отказ абоненту в обслуживании при организации соединений с использованием алгоритма доступа, имеющего совмещенные каналы управления, происходит в том случае, если после анализа состояния всех каналов системы они оказались занятыми.
Результаты оценки эффективности алгоритмов радиодоступа позволяют сделать следующие выводы.
1. Алгоритм привязки ПА при использовании выделенных фиксированных каналов управления обладает:
- простотой собственно алгоритма и его технической реализации; низкими аппаратурными затратами (отсутствие дополнительных устройств, например устройств поиска канала управления и свободных каналов связи); возможностью организации приоритетного обслуживания, например предоставления свободного канала связи, прерывания информационного обмена между абонентами низшего приоритета и т. д.
К недостаткам алгоритма можно отнести:
Более низкие, чем при использовании алгоритмов с совмещенными каналами управления, вероятностные характеристики обслуживания;
Высокую нагрузку на канал управления (ощутима вероятность так называемых многократных соединений);
Необходимость повторного использования канала управления для передачи номера свободного канала связи в случае вызова со стороны подвижного объекта.
2. Алгоритм доступа ПА при использовании выделенных нефиксированных каналов управления позволяет несколько улучшить вероятностные характеристики обслуживания подвижного абонента, что достигается усложнением собственного алгоритма и применением АПСВК.
3. Алгоритм радиодоступа при использовании совмещенных каналов управления имеет:
- высокие вероятностно-временные характеристики обслуживания подвижного абонента; распределенную нагрузку на канал управления при организации соединений, изменяющуюся пропорционально изменению количества свободных каналов (вероятность многократных соединений мала); возможность быстрого предоставления канала связи, обусловленную алгоритмом доступа.
Однако для данного алгоритма проблематична организация приоритетного обслуживания абонентов, имеющих различный статус.
Структурная схема стандарта GSM.
Стандарт GSM определяет сеть подвижной связи общего пользования, работающей в диапазоне 900 МГц и построенную по модульному принципу.
Система GSM состоит из 3 основных подсистем:
- Подсистемы базовых станций (BSS); Сетевая подсистема (NSS); Системы обеспечения и технического обслуживания сети (OSS).
1. BSS состоит из базовой приемопередающей станции (BTS) и контроллера базовой станции (BSC). Вся территория разделяется на соты, каждая из которых контролируется одной базовой приемопередающей станцией. BTS обеспечивает радио интерфейс между мобильными станциями и контроллером BSC. Контроллер управляет работой нескольких BTS. Он представляет собой коммутационную систему для сигнализации и осуществления процедуры перехода подвижных абонентов из одной соты в другую.
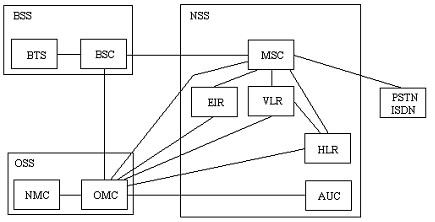
Рисунок 8.1 - Структура системы стандарта GSM
2. NSS управляет распределением вызовов, процессом тарификации и сопряжением с телефонной сетью общего пользования. Сетевая подсистема выполняет 5 основных функций:
- Коммутационного центра подвижной службы (MSC);
- Базового регистра местонахождения (HLR);
- Регистра временных данных местонахождения (VLR);
- Центра аутентификации (опознания) (AUC);
- Регистра идентификации оборудования (EIR).
MSC является центром коммутации одного района. Он осуществляет коммутацию каналов, сигнализацию, адресацию, межсетевой интерфейс, управляет переходом подвижных абонентов из одной сотовой ячейки в другую, а также фиксирует всю информацию о тарификации вызовов, сделанных с его территории и пересылает ее в эксплуатационный центр (ОМС).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
