


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
fПЧ3 = fС – [(fПГ ± Дf)x3] - [(fg ± Дf)x3] – fГЕТ2
Компенсация нестабильности частоты передатчика осуществляется в процессе формирования частоты сигнала передатчика (рис.4).
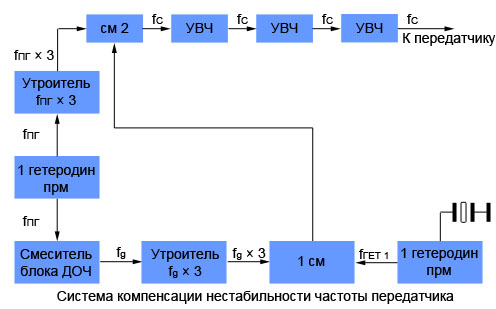
Рис.4. Система компенсации нестабильности частоты передатчика.
Задающим генератором передатчика является плавный генератор, напряжение сигнала которого подается на второй смеситель передатчика.
Для получения частоты сигнала fc необходимо подать на этот же смеситель напряжение с частотой, равной первой промежуточной частоте приемника fПЧ1. Напряжение этой частоты fПЧ1 снимается с первого смесителя передатчика, на который подается напряжение генератора, стабилизированного кварцем с частотой fГЕТ1 и утроенная частота fg. Поэтому, частота сигнала образуется при сложении частот fПГ x 3, fg x 3 и fГЕТ1
fС = (fПГ x 3) + (fg x 3) + fГЕТ1
Как указано выше, уходы частот fПГ и fg равны и противоположны по знаку, поэтому частота сигнала fC остается постоянной при наличии нестабильности частоты fПГ
fС = [(fПГ ± Дf)x3] + [(fg ± Дf)x3] + fГЕТ1
Принцип работы системы дистанционной настройки радиостанции Р-832 М
По принципу действия система дистанционной настройки радиостанции Р-832М относится к полуавтоматическим системам, в которых оператор с пульта управления дистанционно переключает датчик опорных частот на какую-либо частоту его сети, а настройка всех остальных элементов радиостанции осуществляется автоматически по выбранной опорной частоте.
Система дистанционной настройки решает три основных задачи:
а) установку опорной частоты;
б) автоматическую настройку плавного генератора по выбранной опорной частоте;
в) установку углов конденсаторов переменной емкости контуров приемника и передатчика.
Дистанционная установка опорной частоты осуществляется в датчике опорных частот. Автоматическая настройка плавного генератора (ПГ) приемника по выбранной опорной частоте осуществляется за счет последовательного действия системы поиска и системы автоматической подстройки частоты.
При работе указанных систем индикатором настройки служит частотный дискриминатор датчика опорных частот (ДОЧ). Электромеханическая система поиска воздействует на частоту настройки плавного генератора путем вращения ротора конденсатора переменной емкости (КПЕ). Система автоматической подстройки, определяющая конечную точность настройки, воздействует на настройку ПГ двумя способами: с помощью вращения КПЕ (электродвигателя) и электронного управляющего элемента (ферровариометра).
В целях исключения ложных настроек применена система выбора сектора (поддиапазона) поиска. В зависимости от выбранной опорной частоты системе выбора сектора определяет поддиапазон, в пределах которого находится требуемая частота, и выключает датчик опорных частот, когда частота гетеродина выходит за пределы указанного диапазона. Одновременно с настройкой ПГ устанавливаются механически сопряженные с ним углы КПЕ контуров приемника и передатчика.
Схема системы дистанционной настройки представлена на рис.5.
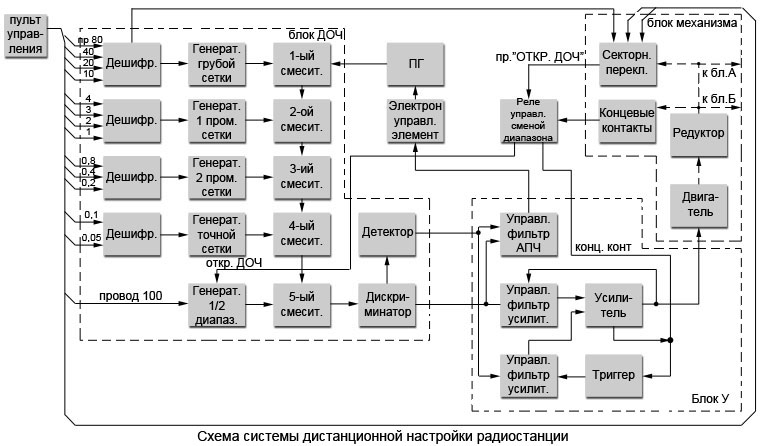
Рис.5. Схема системы дистанционной настройки радиостанции.
Для дистанционного управления датчиком опорных частот, осуществляемого с вынесенного пульта, применяется параллельный 14-ти разрядный код. Роль датчиков кода выполняют два устройства - устройство набора частоты (наборное устройство - НУ) и запоминающее устройство (ЗУ) на 20 каналов.
Наборные устройства для диапазонов УКВ и ДЦВ - разные и предназначены для настройки только в соответствующем диапазоне. Для обеспечения работы станции во всем диапазоне волн (УКВ и ДЦВ) на борту самолета должны быть установлены два наборных устройства - наборное устройство УКВ (в блоке 61) и наборное устройство ДЦВ (в блоках 21 и 22). Наборное устройство позволяет произвести набор любой частоты в пределах сетки частот радиостанции с помощью трех операций - поворотом 3-х переключателей ("десятки МГц", "единицы МГц", "доли МГц"). Запоминающее устройство позволяет осуществить выбор любой из 20 предварительно настроенных волн с помощью одной операции - поворотом ручки ЗУ "канал" на требуемый канал.
Поиск выбранной опорной частоты производится в пределах всего диапазона с помощью электродвигателя Ml, который питается от усилителя постоянного тока блока 11. Направлением поиска управляет триггер с двумя устойчивыми состояниями, который опрокидывается на краях диапазона сигналом, поступающим с концевых микровыключателей В3 и В4 механизма настройки. При опрокидывании триггера происходит изменение полярности выходного напряжения усилителя и, вследствие этого, реверсирование двигателя (сигнал с выхода триггера воздействует на вход усилителя).
Поиск производится до тех пор, пока частота ПГ не попадет в полосу схватывания системы АПЧ, при этом триггер отключается от усилителя под воздействием напряжения, поступающего с детектора блока ДОЧ. На триггер, кроме напряжения с концевых контактов, подается также напряжение с выхода дискриминатора, усиленное первыми каскадами УПТ. Это напряжение опрокидывает триггер из одного устойчивого состояния в другое при переходе положения настройки.
Благодаря этому, при выходе системы из зоны действия АПЧ в процессе поиска триггер остается в том устойчивом состоянии, которое соответствует полярности последнего действующего напряжения, т. е. триггер запоминает направление прохода настройки и, воздействуя на усилитель, реверсирует двигатель в направлении настройки.
Дискриминатор используется для точной настройки и подстройки частоты ПГ. Настройка по дискриминатору начинается в момент, когда путем поиска частота ПГ попадает в полосу схватывания системы АПЧ. В этот момент, как указsвалось, на триггер подается напряжение с детектора блока ДОЧ, и он отключается от усилителя. Одновременно на вход усилителя подается напряжение с выхода дискриминатора. Это же напряжение подается на вход электронного управляющего элемента.
Совместная работа механического и электронного управляющих элементов происходит следующим образом: двигатель Ml изменяет частоту ПГ путем вращения ротора КПЕ, а электронный управляющий элемент выполняет ту же задачу путем изменения индуктивности ферровариометра, подключенной параллельно контуру ПГ.
Таким образом, с момента вхождения частоты ПГ в полосу схватывания работа системы АПЧ осуществляется с помощью двух управляющих элементов: электронного и механического.
На рис.6 приведены характеристики, поясняющие работу системы при наличии двух управляющих элементов: механического и электронного. Кривая 1 представляет собой статическую характеристику дискриминатора в системе координат Дf, Uу, которая при пересчете частотных расстроек в соответствующие угловые величины может рассматриваться и как характеристика в системе координат Дб, Uу. Эта кривая характеризует зависимость напряжения на дискриминаторе от угловых расстроек ПГ при отключенном электронном управляющем элементе.
Кривые 2 представляют собой статические характеристики электронного управляющего элемента, совмещенные с характеристикой дискриминатора в одной системе координат. Кривая, соответствующая максимальной девиации частоты, определяет полосу удержания системы АПЧ с электронным управляющим элементом. На рис.6 кривая 2, определяющая полосу удержания, условно проведена через точку максимального значения напряжения дискриминатора; практически эта кривая проходит ниже.
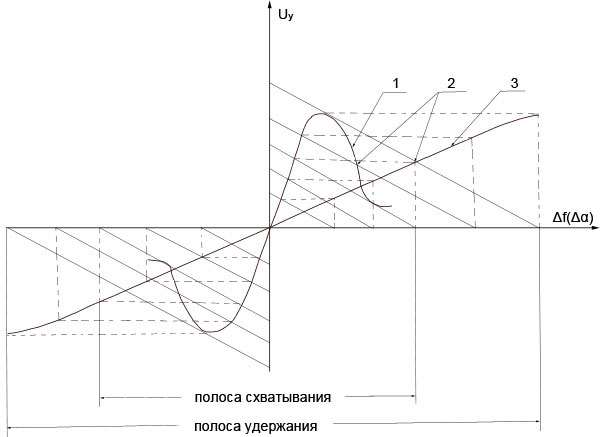
Рис.6. Характеристики работу системы: механического и электронного.
Кривая 3, проведенная через точки, полученные путем вспомогательных построений, характеризует собой зависимость напряжения на дискриминаторе от угловых расстроек конденсатора ПГ при подключенном электронном управляющем элементе и редставляет собой обобщенную характеристику дискриминатора при совместном действии двух управляющих элементов. Для обеспечения устойчивости системы в схеме предусмотрены управляющие фильтры, меняющие свои характеристики при переходе от поиска к режиму удержания. Фильтр на входе электронного управляющего элемента управляется сигналом, поступающим с детектора ДОЧ. Фильтр на входе УПТ меняет свои характеристики под воздействием напряжения, снимаемого с выхода УПТ.
В процессе поиска датчик опорных частот отпирается лишь на то время, в течение которого частота ПГ находится в пределах выбранного поддиапазона. Это обеспечивается системой выбора сектора, состоящей из дешифратора в блоке ДОЧ и секторного переключателя в механизме настройки. Схема дешифратора и конфигурация контактов секторного переключателя выбраны таким образом, что весь диапазон частот радиостанции разбивается на 17 поддиапазонов по 200 волн в каждом поддиапазоне.
Усилитель постоянного тока имеет релейную характеристику показанную на рис. 4, следовательно, максимальная величина остаточной расстройки определяется напряжением отпускания усилителя Uотп (рис.7).
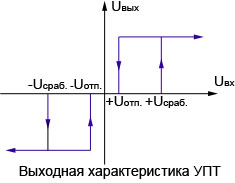
Рис.7. Выходная характеристика УПТ.
Как указывалось выше, дистанционная установка опорной частоты сводится к включению соответствующих реле в ДОЧ. Реле включается в соответствии с кодом, передаваемым с пульта управления по 14-ти проводам. Код, используемый в радиостанции, представлен в таблице 1. Все провода разбиты на 3 группы:
1 группа – 1 - 5 провода - используется для переключения десятков МГц;
2 группа – 6 - 9 провода - для переключения единиц МГц;
3 группа – 10 - 14 провода - для переключения долей МГц (с шагом через 50 кГц).
Особенностью выбранного кода, вытекающей из структуры блока ДОЧ, является то, что во второй половине диапазона во 2 и 3 группах кодовые комбинации следуют в обратном порядке. Так, например, при переключении единиц МГц от 0 до 9 в первой половине диапазона кодовые комбинации 2 группы меняются от 0000 до 1001. Если частота находится во 2 половине диапазона, то кодовые комбинации меняются от 1001 до 0000.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
