


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

Рис 1.3 Функциональная схема приемника
§1.1.5 Процессор сигналов
Принцип работы процессора сигналов заключается в следующем.
Процессор сообщений состоит из четырех функциональных узлов. Этими узлами являются: видеопроцессор, амплитудно-импульсный модулятор, процессор данных и синхронизатор. Функциональная схема приведена на рис.3.4
Видеопроцессор получает продетектированные видеоимпульсы от приемника и определяет разницу амплитуд между импульсами Р1 и Р2 и импульсами Р3 и Р4. Если мощность сигнала менее 78 дБ, то сигнал не проходит. Если соотношение амплитуд Р2 и Р1 или Р4 и Р3 6 дБ и менее, то импульсы Р2 и Р4 не проходят. Выход видеопроцессора соединен со входом амплитудно-импульсного декодера.
Амплитудно-импульсный декодер декодирует полученный сигнал и определяет его тип: RBS, RBS only all-call, RBS/Mode S all call или Mode S. С выхода детектора сигналы поступают на синхронизатор и процессор сообщений.
Амплитудно-импульсный декодер также определяет ширину импульса и временной интервал между импульсами для определения характера запроса. При обнаружении неисправности при декодировании происходит сброс сигнала.
Схема синхронизации содержит генератор 20 МГц для генерирования тактовых сигналов. Тактовые сигналы в свою очередь генерируют частоту 10 МГц для работы центрального процессора, два сигнала по 4 МГц для работы декодера, 3.3 МГц для работы регистров хранения длинных сообщений и 690 КГц для посылки ответов в режиме RBS. Схема переключения подключает по очереди то один, то второй видеопроцессор с частотой 125 нс, а также сравнивает амплитуды сигналов с первого и второго видеопроцессоров и выделяет процессор с наибольшей амплитудой.
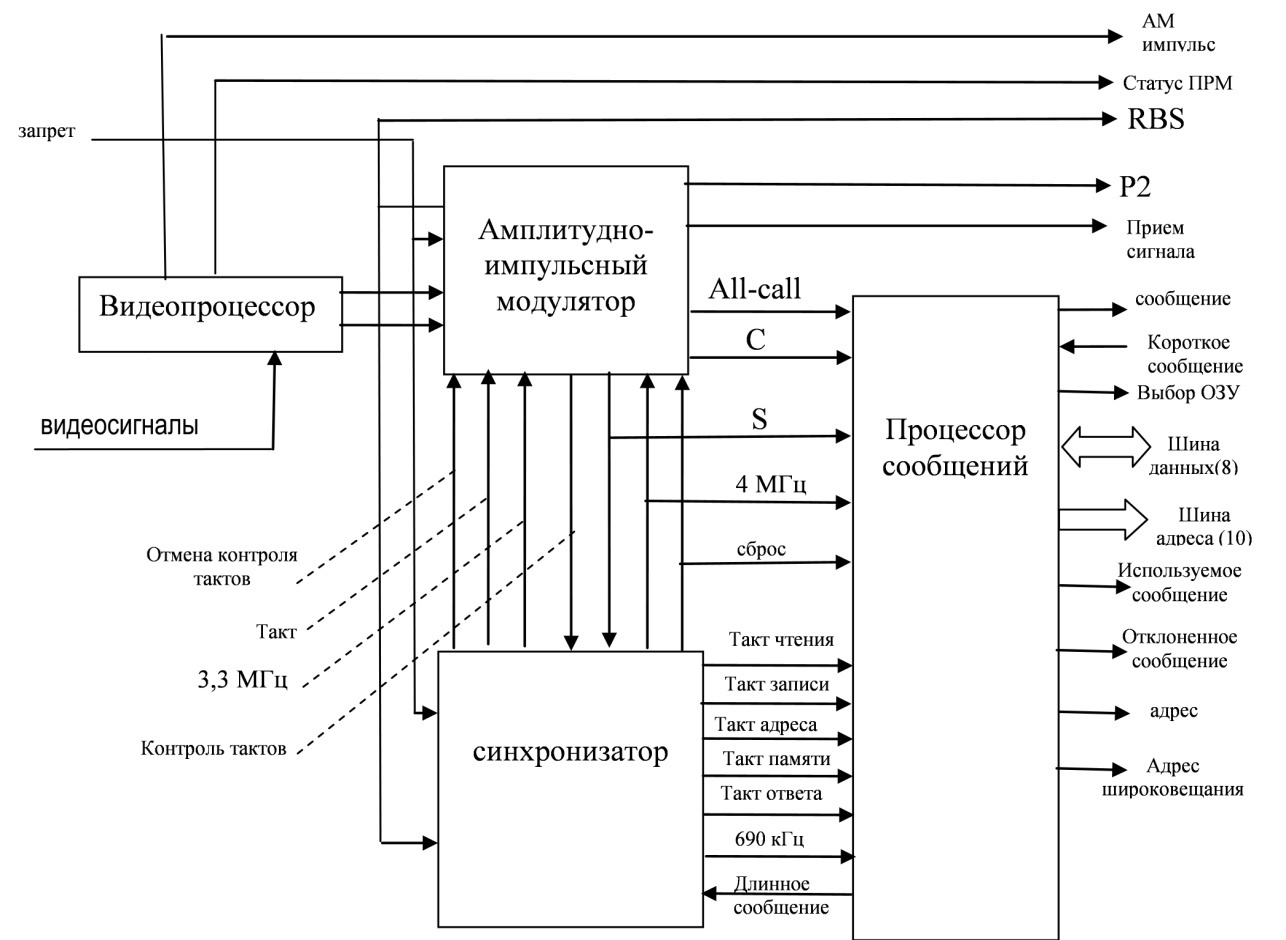
Рис 1.4 Функциональная схема процессора сигналов
§1.1.6 Процессор сообщений
Процессор сообщений приведен на рис.1.5. Он состоит из вентильных цепей, перепрограммируемой ПЗУ и двухканальной ОЗУ. Во время запроса, ПЗУ генерирует синхронизирующий сигнал для ОЗУ для записи принятого сообщения по определенному адресу в ОЗУ. Далее принятый сигнал поступает на декодер, где он расшифровывается и из него выделяется индивидуальный адрес самолета. Также ПЗУ обеспечивает синхронизирующий сигнал для считывания из ОЗУ ответного сообщения и пересылки его на передатчик в течение 128 микросекунд для режима S.
Интерфейс ввода-вывода предназначен для согласования входных сигналов, как параллельных, так и последовательных, с шинами данных ARINC 429 и ARINC 575, а также их синхронизации с шиной.
ARINC 429 является двухпроводной шиной данных. Соединительные проводники — витые пары. Размер слова составляет 32 бита, а большинство сообщений состоит из единственного слова данных. Сообщения передаются на одной из трёх скоростей: 12,5, 50 или 100 Кбит/сек. Передатчик всегда активен, он либо передаёт 32-битовые слова данных или выдаёт «пустой» уровень.
Каждое слово ARINC — 32-битовая величина, которая содержит пять битовых полей:
- Бит 32 является паритетным битом, и используется для проверки того, что слово не было повреждено или искажено во время передачи. Бит четности.
Биты 30 — 31 являются «Матрицей Признака» или статуса, или SSM (Sign/Status Matrix), и часто указывают, действительны ли данные в слове. Рабочее состояние — данные в этом слове, как полагают, являются правильными данными. Тестовое состояние — данные предоставляются для тестовых целей. Отказ — Отказ аппаратных средств, связанных с выдачей этого слова. Отсутствуют — Данные отсутствуют, неточные или устаревшие по некоторым причинам кроме отказа аппаратных средств.
Иногда данное поле может указывать знак (+/-) данных или быть частью информации. Для передачи отрицательного значения используется обратный код.
Биты 11 — 29 содержат основные данные. Битовые поля, записанные как двоично-десятичный код или бинарный дополнительный код стандартные для формата данных ARINC 429. Так же Формат битового поля может быть смешанным.
Биты 9 и 10 — Идентификаторы «Источника/Назначения». Указывают, для какого приёмника предназначены эти данные или, более часто, какая подсистема передала данные.
Биты 1 — 8 содержат идентификатор типа данных. Это адрес в двоично-восьмеричной системе. хх-сотни, ххх-десятки, ххх-единицы адреса.

Рис 1.5 Функциональная схема процессора сообщений
§1.1.7 Видеопроцессор
Видеопроцессор разработанного ответчика предназначен для преобразования принятого видеосигнала в цифровую форму, удобную для прохождения через амплитудно-импульсный детектор и процессор сообщений. Видеопроцессор получает видеосигнал от приемника. Видеопроцессор состоит из двух цепей, работающих параллельно.
Функциональная схема видеопроцессора приведена на рис.1.6

Рис 1.6 Функциональная схема видеопроцессора
§1.1.8 Центральный процессор
Центральный процессор предлагаемого ответчика состоит из двухпортового ОЗУ, перепрограммируемого ПЗУ, ПЗУ, центрального процессора и мультиплексоров, необходимых для осуществления взаимосвязи с другими узлами при выдаче ответов в режиме S.
Процессор представляет собой микроконтроллер серии 8097.
Микроконтроллер состоит из последовательного порта, входа синхронизации, 10-битного анолого - цифрового преобразователя, 232-байтного регистра и импульсного генератора. Микроконтроллер рпаботает очень быстро, обеспечивая ответный сигнал за период 128 микросекунд. Вход микроконтроллера имеет частоту 10 МГц. Также имеются выходы прерывания, аналоговые синусно-косинусные синхровыходы, 8-битная параллельная шина данных, 16-битная шина адреса и выводы для дискретных сигналов.
Схема центрального процессора приведена на рис.1.7
Память микроконтроллера состоит из двух ППЗУ программ (8-битные слова, всего 16к), двух ОЗУ(8-битные слова, всего 4к) и ПЗУ (8-битные слова, всего 1к). Все запоминающие устройства имеют 16-разрядную шину адреса.
Центральный процессор генерирует сообщения в режиме S и посылает его в процессор сообщений для пересылки на наземную станцию. Центральный процессор соединяется с процессором сообщений через двухпортовое ОЗУ. Центральный процессор имеет доступ к одному из портов ОЗУ, а процессор сообщений к другому. Процессор сообщений формирует ответы на запросы в режимах A, C, RBS/S All-call без прерывания работы центрального процессора. Каждый восьмой запрос RBS или All-call прерывает работу центрального процессора и производится ответ, содержащий информацию о скорости полета.
Программа работы ответчика хранится в ППЗУ с ультрафиолетовой записью информации. Программа выполняется микроконтроллером 8097, с внешним кварцевым генератором 10 МГц.
Программа выполняет восемь следующих функций:
- обработка сообщения
- обработка данных
- координация с работой TCAS
- обработка контрольных слов
- обработка данных о высоте
- обработка дискретных данных
- самотестирование
- встроенный контроль
Обработка сообщения осуществляется процессором сообщений и заключается в определении режима запроса, активной антенны, запись содержания запроса в регистр. Если пришел запрос режима S, производится прерывание центрального процессора, который производит определение содержания запроса и формирование ответа.
Процессор сообщений, получив запрос в режиме S, посылает сигнал прерывания в центральный процессор. Центральный процессор сохраняет запрос в специальном регистре, и входит в режим ожидания сигнала готовности приема ответа. Этот сигнал поступает через 15 микросекунд при работе с коротким сообщением, и через 29 микросекунд при работе с длинным сообщением. После получения сигнала готовности происходит определение правильности адреса. Если адрес не совпал, значит сообщение адресовано другому самолету, прерывание процессора прекращается, и он переходит в режим ожидания. Если адрес совпал, процессор расшифровывает запрос и определяет ответное сообщение.

Рис 1.7 Схема функциональная центрального процессора
§1.2 Анализ системы встроенного контроля самолетного ответчика
Самолетный ответчик оснащен двухсторонней связью с централизованной счистемой поиска нгеисправностей с помощью шины ARINC-429.
Встроенная система контроля может работать в двух режимах:
Нормальный режим Режим менюВ нормальном режиме ответчик постоянно передает данные в централизованную систему поиска неисправностей.
В режиме меню на узлы ответчика выдаются тестовые сигналы, а ответы на них передаются в централизованную систему поиска неисправностей. Режим меню может применяться только когда самолет находится на земле, и двигатели выключены.
Встроенная система постоянно отслеживает параметры ответчика и сохраняет выявленные неисправности в постоянной памяти.
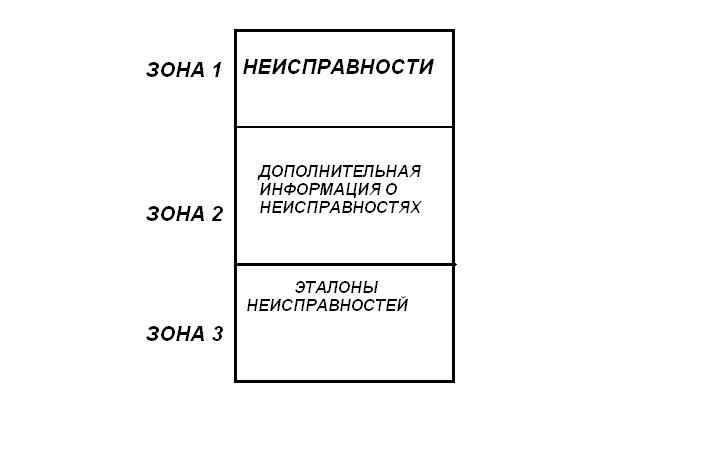
Постоянная память неисправностей делится на три зоны. Зона 1 хранит данные о неисправностях на протяжении 63 последних полетов. В зоне 2 хранится дополнительная информация о неисправностях, хранимых в зоне 1. Дополнительная информация включает в себя время проявления неисправности, идентификационный номер самолета. Зона 3 предназначена для хранения наиболее часто проявляемых отказов. Структура памяти неисправностей приведена на рис.1.8
Отказы записываются в память через каждый полный цикл работы центрального процессора. При выявлении неисправности, она записывается в память, и наиболее ранняя неисправность стирается из памяти. Для каждого узла ответчика сохраняется последние 4 неисправности. При полном заполнении памяти неисправностей, они начинают записываться в зону 2 памяти, то есть если выявлено слишком много неисправностей, то сохраняются сами неисправности, и дополнительная информация о них стирается.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
