


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Значения разрядов кода («0» или «1») передаются с помощью фазовой модуляции, при которой символу «0» соответствует фаза несущей частоты φ = 0, а символу «1» φ =180° (или наоборот). Благодаря принятой структуре кода и фазовой манипуляции помехи со стороны системы DABS существующим ответчикам, работающим в режиме RBS. Исключаются.
Сигнал ответа в системе DABS (предусмотрено 24 варианта) (рис. 2.8) состоит из координатного кода, представляющего собой группу из четырех импульсов, и информационного кода. Информационный код, как и код запроса, имеет 56 или 112 разрядов, но в каждом из них предусмотрены две «импульсные» позиции (режим с активной паузой). В сигнале ответа повторяется код запрашиваемой информации, передается основное сообщение и в заключение повторяется код адресования 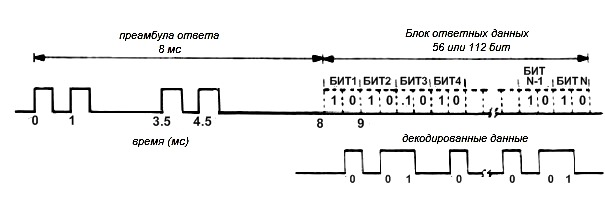
Рис.2.8 Структура ответного кода системы DABS в режиме Roll-call
При передаче информационного кода также применяется фазовая манипуляция. Принятая структура сигнала ответа и фазовая манипуляция при передаче данных исключают помехи со стороны ответчиков DABS существующим системам УВД.
Детектирование модулированных фазовой модуляцией сигналов происходит по схеме, приведенной на рис. 2.9
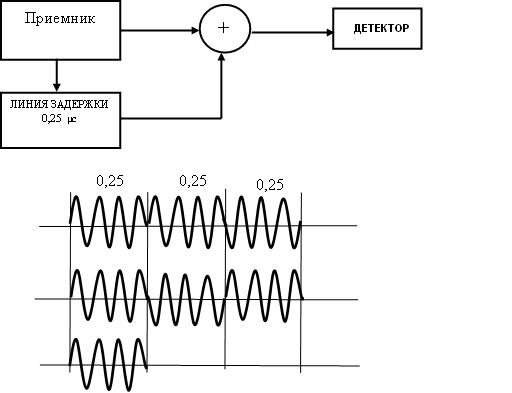
Рис.2.9 Принцип дешифрации сигналов запроса (код 100)
Если код ответа состоит из 56 импульсов, то ответ называется коротким, если из 112-то длинным. Каждый ЛА имеющий режим S имеет собственный 24 битный адрес. Этот адрес включен во все передачи в режиме S, при этом сигнал запроса может быть отослан на самолет с определенным адресом исключая возможность получения многократных ответов. Также самолет, работающий в режиме S способен получать ответы от строго определенного самолета.
Если дискретный адрес включается в запрос, то ответный код также содержит информацию об адресе. Ответный дискретный код формируется в зависимости от сигнала запроса и может содержать в себе информацию любого параметра самолета. Это особенно важно при работе с аппаратурой ТСАS.
Таким образом, для контроля выбираются следующие параметры:
Длительность импульса Р1 в режиме RBS Длительность импульса Р2 в режиме RBS Длительность импульса Р3 в режиме RBS Временной промежуток между импульсами Р1 и Р3 в режиме А (RBS) Временной промежуток между импульсами Р1 и Р3 в режиме С (RBS) Длительность короткого импульса Р4 в режиме ALL-CALL Длительность длинного импульса Р4 в режиме ALL-CALL Длительности импульсов Р1 и Р2 в режиме S (сигнал запроса) Длительность информационного импульса Р6 в режиме S (сигнал запроса) Проверка параметров DPSK модуляции (Differential phase shift keying) в запросном сигнале Проверка длительности преамбулы в ответном сигнале Проверка параметров PPM модуляции (Pulse position modulation) в ответном сигнале§ 2.3 Определение требований к системе регистрации
Исходя из вышеизложенного, можно сформулировать следующие требования к разрабатываемой системе регистрации параметров самолетного ответчика.
Система регистрации должна быть достаточно малогабаритной, выполненной на одной плате. Для работы системы регистрации используются сигналы определенного уровня. Для этого должны применяться нормализаторы уровня сигнала. Нормализация измеряемых параметров производится и с преобразованием вида первоначального электрического сигнала. Например, постоянное напряжение может быть преобразовано в частоту.
В предлагаемой схеме генераторы отсутствуют, так как тестирования оборудования не происходит. Запоминающее устройство для хранения информации должно иметь достаточный объем и разрядность записываемых на него данных. Учитывая, что регистрируются в основном временные параметры-длительности различных импульсов, временные промежутки между импульсами, то достаточно иметь разрядность 32 бита/параметр (один параметр занимает 4 байта памяти.)
Немаловажную роль играет периодичность обновления информации. В соответствии с требованиями международной организации гражданской авиации ICAO требуемая частота обновления информации в бортовых самописцах должна быть не менее 1 раза в 2 секунды. Поэтому выберем эту частоту в качестве частоты обновления параметров в предлагаемой системе регистрации параметров самолетного ответчика. Рассчитаем необходимый объем памяти накопителя. Исходными данными для этого являются:
Количество регистрируемых параметров-12
Разрядность параметра-4 байта
Скорость обновления параметров-0,5 герц
Время хранения данных - не менее 12 часов.
Необходимая память для хранения всех параметров в течение 1 секунды-
М=12*4*0,5=24 байта
Для хранения данных на протяжении 12 часов необходима память
М1=24*3600*12=1036800 байт=1Гбайт
Эта минимальная память, необходимая для сохранения всех параметров в течение 12 часов работы блока.
Память должна легко извлекаться из блока самолетного ответчика и читаться на персональном компьютере с помощью стандартных Card reader.
Основная цель установки съемного накопителя - получать параметрическую информацию о работе узлов блока самолетного ответчика, анализировать ее и делать выводы о состоянии узлов. Это позволит предсказывать предотказное состояние самолетного ответчика и заказывать его до выхода из строя.
ГЛАВА 3. РАЗРАБОТКА ЗАПОМИНАЮЩЕГО УСТРОЙСТВА
§ 3.1 Разработка структурной схемы контроллера флеш-памяти
Предлагаемая разработка представляет собой систему сбора информации о ключевых параметрах самолетного дискретно-адресного ответчика.
Система сбора данных (ССД) — комплекс средств, предназначенный для работы совместно со специализированным устройством и осуществляющий автоматизированный сбор информации о значениях физических параметров в заданных точках объекта исследования с аналоговых и/или цифровых источников сигнала, а также первичную обработку, накопление и передачу данных.
Сканирующий принцип построения ССД используется там, где надо измерить поле распределения параметров: тепловизор, аппарат УЗИ, томограф используют для получения первичной информации именно ССД сканирующего типа.
Параллельными системами сбора данных следует считать ССД на основе т. н. интеллектуальных датчиков (ИД). Каждый ИД суть одноканальная ССД со специализированным интерфейсом. Исторически первыми параллельными ССД были ССД, где у каждого датчика «личным» был только АЦП, а сбор и обработка данных осуществлялась многопроцессорной ЭВМ. В настоящее время для сбора и обработки измерительной информации как правило вполне хватает вычислительных характеристик «обычной» ЭВМ. Параллельные системы пока еще не вытесняют мультиплексорные, в силу своей аппаратурной избыточности. Однако в ряде случаев параллельный принцип привлекателен: когда есть недорогие готовые ИД и недорогой канал связи (например система на интерфейсе 1-Wire) либо при небольшом числе каналов (выпускаются счетверенные сигма-дельта АЦП) и т. п.
Мультиплексная (мультиплексорная) ССД имеет на каждый измерительный канал индивидуальные средства аналоговой обработки сигнала и общий для всех каналов блок аналого-цифрового преобразования (помимо самого АЦП в него обязательно входит «антиалиасинговый» ФНЧ, устройство выборки хранения, опционально — схема защиты и схема формирования знакового разряда). Наибольшее распространение в настоящее время имеют именно мультиплексные системы сбора данных.
Типовая система сбора данных является мультиплексной и содержит в себе следующие узлы: датчики, аналоговый коммутатор, измерительный усилитель, аналого-цифровой преобразователь, контроллер сбора данных, модуль интерфейса. Также ССД часто оснащаются цифровыми линиями ввода-вывода и цифро-аналоговым преобразователем (ЦАП).
Из существующих типов систем сбора данных для сбора параметров самолетного ответчика наиболее подходит Мультиплексная (мультиплексорная) ССД.
Наиболее подходящим видом памяти для хранения информации о параметрах самолетного ответчика является Флэш-память. В настоящее время устройства флэш-памяти приобрели большую популярность и завоевали всеобщее признание пользователе. Это стало возможно благодаря таким качествам накопителей данного типа, как компактность, малое энергопотребление, большой объем памяти, отсутствие движущихся частей, высокая надежность и простота использования.
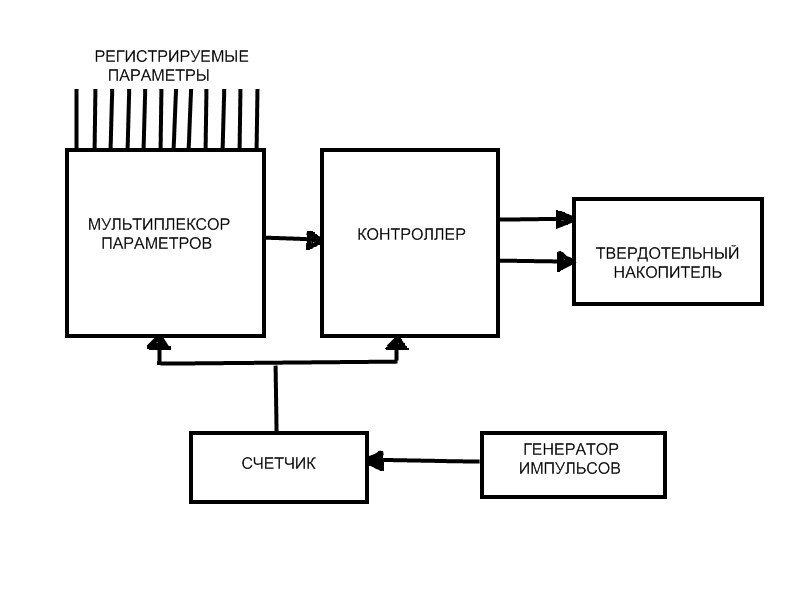
Рис.3.1. Структурная схема системы регистрации
Предлагаемая структурная схема системы регистрации параметров работы самолетного ответчика приведена на рис.3.1.
Все параметры поступают на мультиплексор. Мультиплексор представляет собой устройство, имеющее несколько сигнальных входов, один или более управляющих входов и один выход. Мультиплексор позволяет передавать сигнал с одного из входов на выход; при этом выбор желаемого входа осуществляется подачей соответствующей комбинации управляющих сигналов.
В предлагаемой схеме происходит поочередная коммутация 12 параметров к 1 выходу. Для пояснения принципа работы рассмотрим структурную схему мультиплексора (рис.3.2).
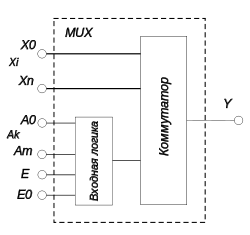
Рис.3.2. Структурную схему мультиплексора
Входные логические сигналы Xi поступают на входы коммутатора и через коммутатор передаются на выход Y. На вход управляющей схемы подаются адресные сигналы Ak (от англ. Address). Мультиплексор также может иметь дополнительный управляющий вход E (от англ. Enable), который разрешает или запрещает прохождение входного сигнала на выход Y.
Кроме этого, некоторые мультиплексоры могут иметь выход с тремя состояниями: два логических состояния 0 и 1, и третье состояние — отключённый выход (высокоимпедансное состояние, Z-состояние — выходное сопротивление равно бесконечности). Перевод мультиплексора в третье состояние производится снятием управляющего сигнала OE (от англ. Output Enable).
Для поочередной коммутации параметров и синхронизации работы мультиплексора и контроллера памяти служит система, состоящая из счетчика и задающего генератора.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
