


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
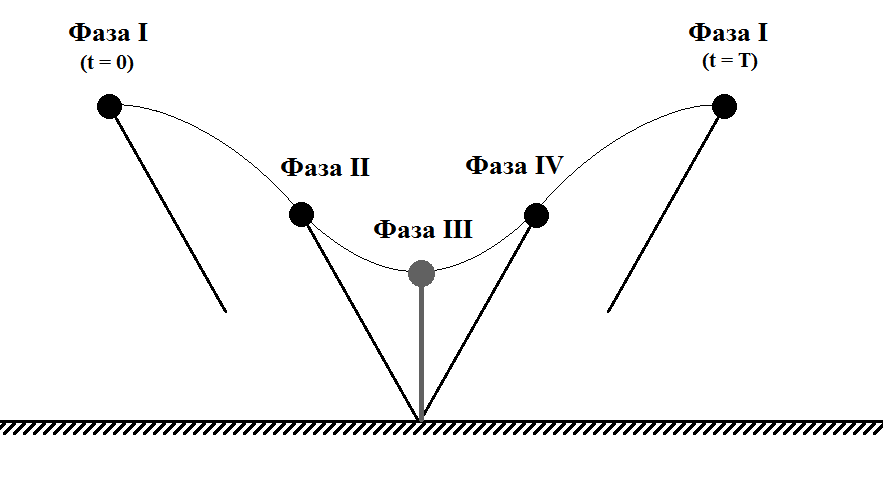
Рис. 4: Фазы движения перевёрнутого маятника
Теперь можно ввести отображение состояний маятника в моменты его наивысшего подъёма. Пусть ![]()
![]() - состояние механизма в момент перехода в фазу I
- состояние механизма в момент перехода в фазу I ![]()
![]() -ного цикла. Тогда следующая формула связывает следующее начальное состояние с предыдущим
-ного цикла. Тогда следующая формула связывает следующее начальное состояние с предыдущим
![]()
Где ![]()
![]() - управление маятником в цикле
- управление маятником в цикле ![]()
![]() . Функция
. Функция ![]()
![]() в этом случае называется отображением Пуанкаре.
в этом случае называется отображением Пуанкаре.
В дальнейшем, нашей задачей станет нахождение для данного начального состояния ![]()
![]() такого управления
такого управления ![]()
![]() , чтобы
, чтобы
![]()
что будет означать нахождение периодической траектории.
§1.3. Формулировка задачи оптимизации
В целом, требование периодичности траектории данной модели маятника оставляет некоторую свободу в выборе управления. Поэтому введём ещё одно требование, характеризующее ритм бега. Исследование экспериментальных данных о человеческом беге, предоставленных Роуландсом[6] позволило сделать следующий вывод: с увеличением скорости ![]()
![]() количество шагов в минуту
количество шагов в минуту ![]()
![]() растёт, а среднее время стойки на опорной ноге
растёт, а среднее время стойки на опорной ноге ![]()
![]() уменьшается. Эти величины могут быть приблизительно вычислены по следующим формулам
уменьшается. Эти величины могут быть приблизительно вычислены по следующим формулам
![]()
![]()
(1.3.1)
Последнее уравнение будет использовано как дополнительное ограничение: желаемое время стойки на опорной ноге будет определено горизонтальной скоростью центра масс
![]()
Моменты начала стойки ![]()
![]() и окончания стойки
и окончания стойки ![]()
![]() могут быть путём интегрирования уравнений соответствующей механической системы. Этот способ вычисления обозначим функцией
могут быть путём интегрирования уравнений соответствующей механической системы. Этот способ вычисления обозначим функцией ![]()
![]() Таким образом, нашей задачей становится подбор такого управления
Таким образом, нашей задачей становится подбор такого управления ![]()
![]() для состояния
для состояния ![]()
![]() , чтобы
, чтобы
Данная задача может быть переформулирована для решения методом наименьших квадратов
(1.3.2)
§1.4. Результаты численных экспериментов.
Для получения описанных опорных траекторий был реализован простой интегратор перевёрнутого маятника. Для решения задачи (1.3.2) был использован метод оптимизации Левенберга-Марквардта, реализация которого была адаптирована из математической библиотеки dlib. Вычисления проводились на домашнем ноутбуке ASUS Eee с процессором AMD 450 APU 1.65 Ггц и заняли около 10 минут.
Величина точечной массы перевёрнутого маятника была равна суммарной массе пятизвенного робота (63.25 кг), длина опорного стержня – 0.9м, длина нерастянутой пружины – 0.7м.
Подбор параметров управления осуществлялся последовательно по всему диапазону горизонтальных скоростей от 0 до 8 м/c с шагом в 0.2 м/с. Параметры управления, полученные как результат для предыдущей скорости, были использованы как начальное предположение для следующей. Начальная жёсткость пружины равна ![]()
![]() , начальная высота центра масс – 0.95м, угол наклона стержня – 0 градусов.
, начальная высота центра масс – 0.95м, угол наклона стержня – 0 градусов.
Модель времени стойки из уравнения (1.3.1) была признана адекватной для горизонтальных скоростей, начиная с 3 м/c. Для скоростей ниже этой желаемое время стойки на опорной ноге было приблизительно оценено в 0.3 секунды.
Графики отражают процесс изменения параметров движения маятника от его горизонтальной скорости во время экспериментов. Начальная высота центра масс меняется, увеличиваясь до 1.2 м (гр. 2). Угол наклона опорного стержня также равномерно растёт, достигая ![]()
![]() (гр. 1). Несмотря на то, что точно следовать желаемому времени стойки робота на земле не удалось, эта величина варьируется в допустимом интервале (гр. 3). Практически экспоненциальное уменьшение жёсткости пружины (гр. 4) отражает тот факт, что с увеличением скорости взаимодействие с опорной поверхностью носит всё более мягкий характер.
(гр. 1). Несмотря на то, что точно следовать желаемому времени стойки робота на земле не удалось, эта величина варьируется в допустимом интервале (гр. 3). Практически экспоненциальное уменьшение жёсткости пружины (гр. 4) отражает тот факт, что с увеличением скорости взаимодействие с опорной поверхностью носит всё более мягкий характер.
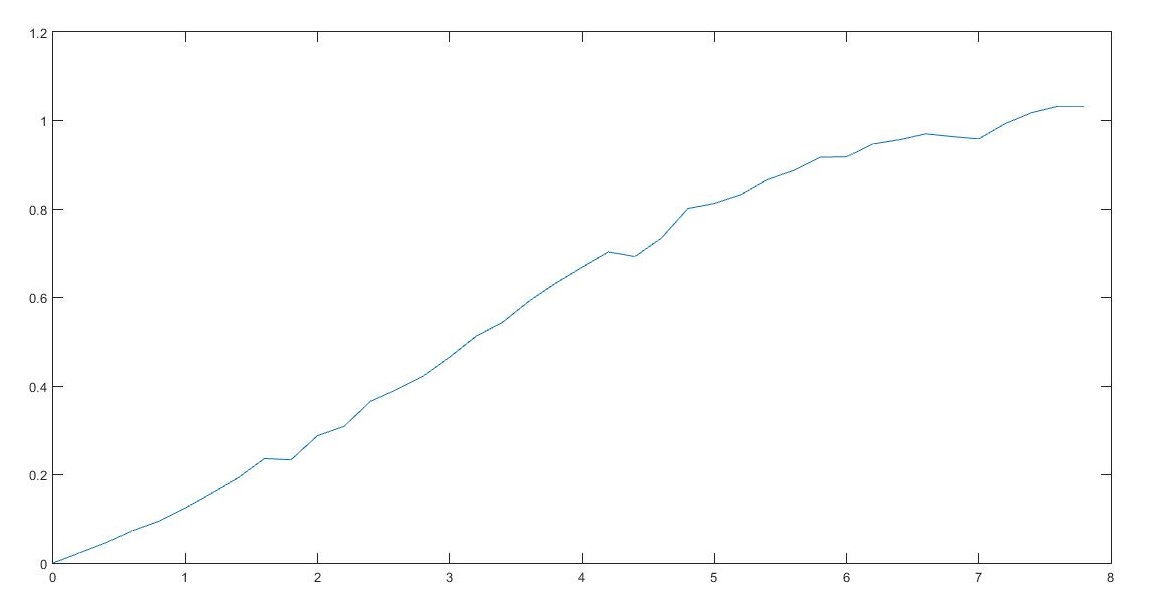
График 1: Зависимость начального угла наклона стержня от горизонтальной скорости модели
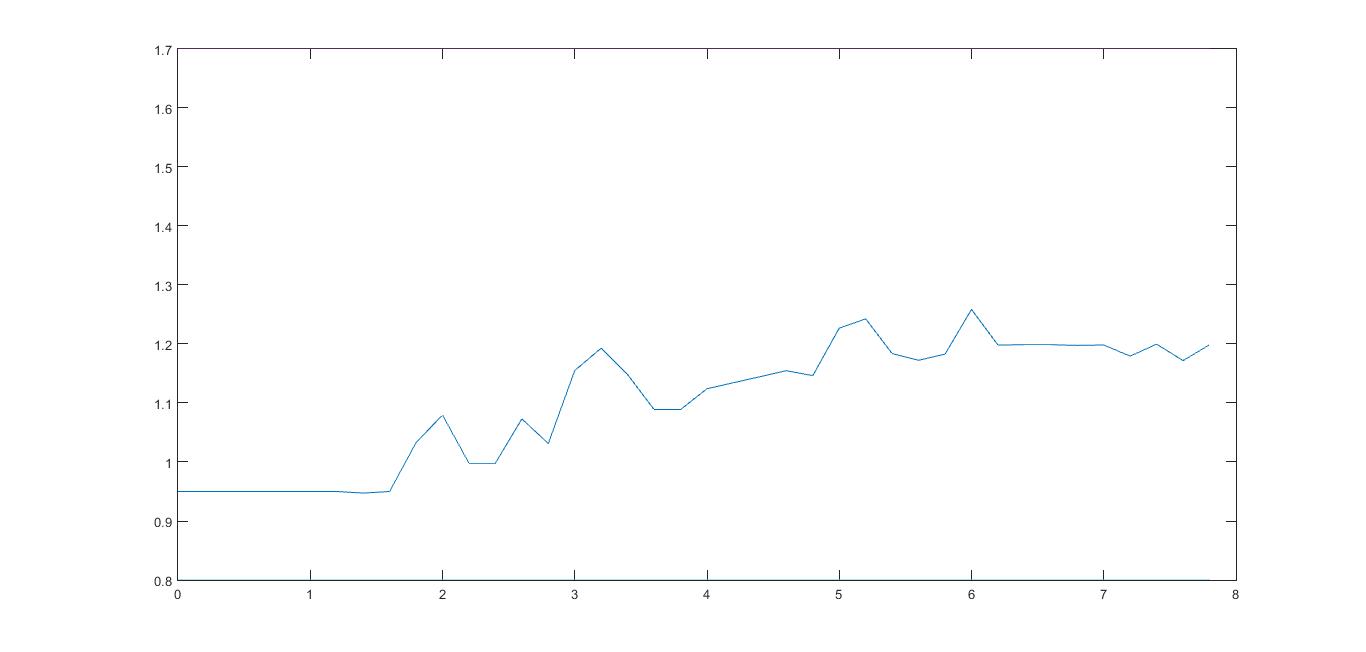
График 2: Зависимость начальной высоты центра масс от горизонтальной скорости модели
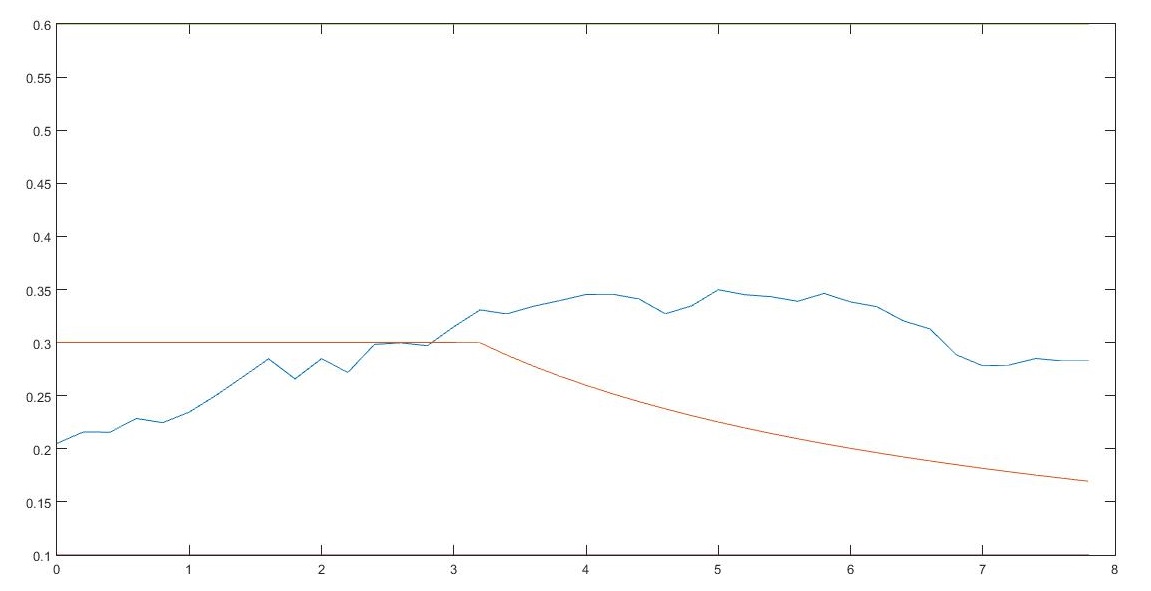
График 3: Синий график: зависимость времени стойки модели от горизонтальной скорости.
Красный: желаемая зависимость.

График 4: Зависимость жёсткости виртуальной пружины от горизонтальной скорости
§1.5. Стабилизация модели около опорной траектории
В этой главе будут описаны подходы к управлению скоростью рассмотренной модели. Имея для определённого начального состояния робота управление, приводящее к периодической траектории движения, необходимо выработать правило подбора управления гашения отклонений. Два подхода будут рассмотрены, одно из которых оперирует с горизонтальной скоростью механизма, а второй – с состоянием робота.
Подход 1.
В отчёте MIT Leg Laboratory от 1989 года [2] был предложен подход к управлению скоростью одноногого прыгающего робота с призматической ногой, основанный на оценке времени стойки. По своей сути, он является модификацией ПИД-регулятора. Зная время стойки ![]()
![]() , текущую горизонтальную скорость
, текущую горизонтальную скорость ![]()
![]() , и желаемую горизонтальную скорость
, и желаемую горизонтальную скорость ![]()
![]() , положение стопы робота относительно центра масс может быть вычислено следующим образом
, положение стопы робота относительно центра масс может быть вычислено следующим образом
Где ![]()
![]() - небольшая положительная константа. Данный подход подходит для управления скоростью при не очень больших отклонениях. Кроме того, аналогичный контроллер может контролировать скорость и по второй горизонтальной оси в случае трёхмерного механизма.
- небольшая положительная константа. Данный подход подходит для управления скоростью при не очень больших отклонениях. Кроме того, аналогичный контроллер может контролировать скорость и по второй горизонтальной оси в случае трёхмерного механизма.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
