
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (60)
(60)
где ![]() - переносное, относительное и кориолисово ускорения точки M соответственно (рис. 18).
- переносное, относительное и кориолисово ускорения точки M соответственно (рис. 18).
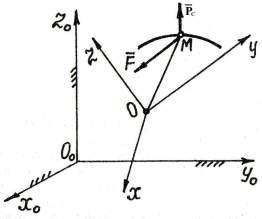
Рис. 18. Схема к анализу сложного движения точки
Надо иметь в виду, что кинематическое уравнение (60) получено без учета массы точки и сил, действующих на неё, поэтому при рассмотрении механодинамики сложного движения точки уравнение (60) становится неполным, так как не учитывает замедления, генерируемые силами инерции. С учетом изложенного необходимо к ускорениям, действующим на точку при её сложном движении, добавить замедления движения точки, которые будут формироваться силами инерции. Замедления ![]() , также как и ускорения, - величины векторные.
, также как и ускорения, - величины векторные.
Переносное ускорение ![]() будет формировать переносную силу инерции
будет формировать переносную силу инерции ![]() , которая будет замедлять движение точки в её переносном движении. Обозначим это замедление так
, которая будет замедлять движение точки в её переносном движении. Обозначим это замедление так ![]() .
.
Относительное ускорение ![]() будет формировать относительную силу инерции
будет формировать относительную силу инерции ![]() . Она тоже будет замедлять относительное движение точки. Обозначим это замедление символом
. Она тоже будет замедлять относительное движение точки. Обозначим это замедление символом ![]() .
.
Так как кориолисова сила ![]() имеет инерциальную природу, то она тоже формирует замедление
имеет инерциальную природу, то она тоже формирует замедление ![]() , направление которого совпадает с направлением вектора кориолисовой силы. Из этого следует ошибочность существовавшего представления о том, что кориолисова сила инерции
, направление которого совпадает с направлением вектора кориолисовой силы. Из этого следует ошибочность существовавшего представления о том, что кориолисова сила инерции ![]() равна произведению массы точки на кориолисово ускорение
равна произведению массы точки на кориолисово ускорение ![]() и направлена противоположно этому ускорению. Из изложенного следует, что кориолисова сила инерции
и направлена противоположно этому ускорению. Из изложенного следует, что кориолисова сила инерции ![]() совпадает с направлением не кориолисова ускорения
совпадает с направлением не кориолисова ускорения ![]() , а с направлением кориолисова замедления
, а с направлением кориолисова замедления ![]() , которое направлено противоположно ускорению, названному кориолисовым.
, которое направлено противоположно ускорению, названному кориолисовым.
Кроме перечисленных сил, на точку в сложном движении действуют силы сопротивления, которые также формируют замедление её движению. Обозначим результирующую этих сил - ![]() , а результирующее замедление, формируемое силами сопротивления, - через
, а результирующее замедление, формируемое силами сопротивления, - через ![]() . Тогда уравнение ускорений и замедлений, приложенных к материальной точке в её сложном движении, в общем виде запишется так
. Тогда уравнение ускорений и замедлений, приложенных к материальной точке в её сложном движении, в общем виде запишется так
![]() . (61)
. (61)
Уравнение сил, действующих на материальную точку в её сложном движении, принимает вид
![]() . (62)
. (62)
Из этого следует
![]() . (63)
. (63)
Тогда общее уравнение механодинамики относительного движения материальной точки становится таким
![]() . (64)
. (64)
Итак, общие уравнения сил, действующих на материальную точку при её сложном (63) и относительном (64) движениях, составлены. Учитывая, что проекции относительного ускорения ![]() точки на подвижные оси координат равны:
точки на подвижные оси координат равны:
![]()
![]()
![]() (65)
(65)
и проектируя векторное уравнение (63) на эти оси, имеем:
 ; (66)
; (66)
 ; (67)
; (67)
 . (68)
. (68)
Это дифференциальные уравнения относительного движения материальной точки в координатной форме. Следующий этап – использование уравнения (63) для частных случаев относительного движения материальной точки. Таких случаев может быть несколько, но мы не будет составлять уравнения для каждого из них, а лишь перечислим их:
1-ускоренные переносное и относительное движения точки;
2-ускоренное переносное и равномерное относительное движения точки;
3-ускоренное переносное и замедленное относительное движения точки;
4-равномерное переносное движение и ускоренное относительное движения точки;
5-равномерное переносное и равномерное относительное движения точки;
6-рвномерное переносное и замедленное относительное движения точки;
7-замедленное переносное движение и ускоренное относительное движения точки;
8-замедленное переносное и равномерное относительное движения точки;
9-замедленное переносное и замедленное относительное движения точки.
Кроме этого подвижная система отсчёта может двигаться поступательно или криволинейно. Каждый из указанных случаев описывается отдельным уравнением:
1) подвижная система XOY движется поступательно. В этом случае ![]() и
и ![]() , поэтому для этого случая, имеем
, поэтому для этого случая, имеем
![]() . (69)
. (69)
2) подвижная система XOY движется поступательно, прямолинейно и равномерно. В этом случае: ![]() и
и ![]() , поэтому
, поэтому
![]() ; (70)
; (70)
3) если точка под действием приложенных к ней сил находится в покое относительно подвижной системы отсчета, то ![]() , поэтому
, поэтому ![]() и уравнение его движения становится таким
и уравнение его движения становится таким
![]() ; (71)
; (71)
209. Как из описанного перейти к анализу процесса формирования замедления кориолисовой силой инерции? Для этого рассмотрим процесс формирования ускорений ползуна, движущегося вдоль ускоренно вращающегося стрежня в горизонтальной плоскости. Схема сил, приложенных к ползуну при таком его движении, представлена на рис. 19. Прежде чем приступать к схематическому показу сил, действующих на ползун (рис. 19), обратим внимание на связь между вращательным (переносным) движением и линейным (относительным) движением ползуна вдоль стержня. Совокупность этих движений значительно отличается от перемещения, например, пассажира вдоль движущегося трамвая. Пассажир может менять свою относительную скорость ![]() произвольно, а ползун лишён такой возможности. Его переносная
произвольно, а ползун лишён такой возможности. Его переносная ![]() и относительная
и относительная ![]() скорости связаны друг с другом. Такая же связь и у сил, действующих на ползун. Поэтому, составляя схему сил, действующих на ползун, обязательно надо учитывать указанную взаимосвязь между его переносным и относительным движениями (рис. 19).
скорости связаны друг с другом. Такая же связь и у сил, действующих на ползун. Поэтому, составляя схему сил, действующих на ползун, обязательно надо учитывать указанную взаимосвязь между его переносным и относительным движениями (рис. 19).
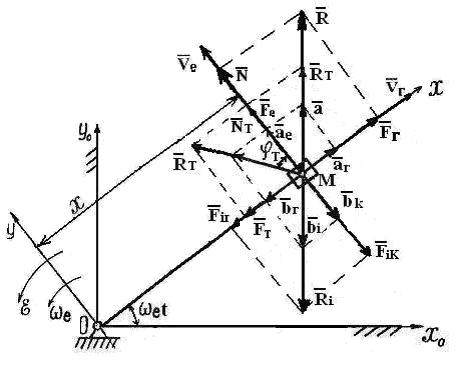
Рис. 19. Схема сил, действующих на ползун М
С учётом изложенного, тщательный анализ процесса движения ползуна (рис. 19) показывает, что на него действуют следующие силы: переносная сила ![]() , вектор которой направлен по нормали к стержню в сторону вращения и равен нормальной реакции
, вектор которой направлен по нормали к стержню в сторону вращения и равен нормальной реакции ![]() стержня на ползун; сила трения
стержня на ползун; сила трения ![]() направлена противоположно движению ползуна относительно стержня и связана с нормальной реакцией
направлена противоположно движению ползуна относительно стержня и связана с нормальной реакцией ![]() через угол трения
через угол трения ![]() и коэффициент трения
и коэффициент трения ![]() (
(![]() ). Результирующая сила
). Результирующая сила ![]() силы трения
силы трения ![]() и нормальной реакции
и нормальной реакции ![]() образуют угол трения
образуют угол трения ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
