
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Задача №1 (Вариант 009).

Выполнить структурный анализ заданной схемы манипулятора, заключающийся в определении числа подвижных звеньев, класса кинематических пар, числа степеней подвижности и маневренности манипулятора. Схема манипулятора, приведен-ная на рис. 1.9 методички (стр. 141), представлена на рис. 1.
Решение. 1. Обозначаем арабскими цифрами звенья манипулятора, начиная от стойки, которой присваиваем цифру «0», остальным по порядку от 1 до 5.
2. Описываем кинематические пары.
2.1. Пара (образована звеньями 0 – 1) является низшей класса 3,т. е. НП3 (шаровая, имеет 3 связи и 3 степени подвижности - вращательные).
2.2. Пара (образована звеньями 1 - 2) является низшей класса 4,т. е. НП4 (цилиндрическая, имеет 4 связи и 2 степени подвижности – вращательное + поступательное).
2.3. Пара (образована звеньями 2 - 3) является низшей класса 3,т. е. НП3 (идентична паре 2.1. - имеет 3 связи и 3 степени подвижности).
2.4. Пара (образована звеньями 3- 4) является низшей класса 5,т. е. НП5 (цилиндрическая с ограничителями, имеет 5 связей и 1 степень подвижности - вращательное).
2.5. Пара (образована звеньями 4 - 5) является низшей класса 5,т. е. НП5 (идентична паре 2.4, имеет 5 связи и 1 степень подвижности).
3. Определяем степень подвижности манипулятора по формуле Сомова – Малышева (для пространственных механизмов)
W = 6*(n-1) – C = 6*(n-1) – ![]()
![]() = (1.1)
= (1.1)
= 6 * (6 – 1) - 3*2 – 2*5 – 1*4 = 10.
4. Определяем маневренность манипулятора, учитыва то, что при фиксированном положении схвата, количество подвижных звеньев уменьшается, а кинемтическая пара 2.5. вырождается, соответственно формула Сомова – Малышева в числовом выражении принимает вид
W = 6*(n-1) – C = 6*(n-1) – ![]()
![]() = (1.2)
= (1.2)
= 6 * (5 – 1) - 3*2 – 1*5 – 1*4 = 9.
Задача №2 (Вариант 009).
Исследовать структуру плоского механизма, представленного на рис. 2.5 методички (стр.144), которая приведена на рис. 2. Определить степень подвижности механизма.
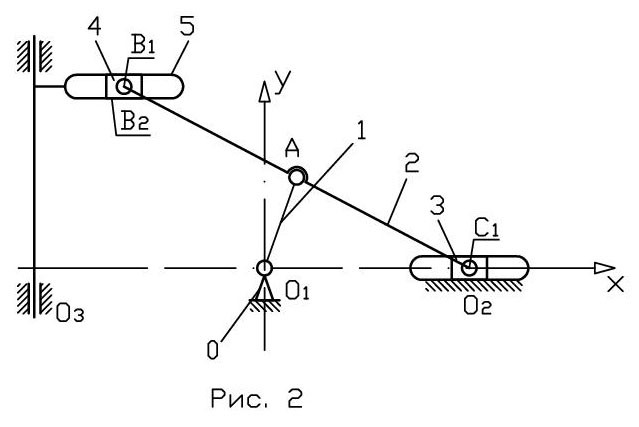
Решение. 1. Обозначаем арабскими цифрами звенья механизма, начиная от стойки, которой присваиваем цифру «0», остальным по порядку от 1 до 5.
2. Определяем наименование звеньев с учетом их назначения. Звено 1 – кривошип (вращательное движение – полный оборот), звено 2 – шатун ( сложное движение), звено 3 и 4 –кулисный камень (поступательное перемещение), звено 5 и стойка О2 – кулиса.
3. Определяем количество, вид и клас кинематических пар.
3.1. Пара (образована звеньями 0 – 1, т. О1) является низшей класса 5, т. е. НП5 (цилиндрическая, имеет 5 связи и 1 степень подвижности - вращательное).
3.2. Пара (образована звеньями 1 – 2, т. А) является низшей класса 5, т. е. НП5 (цилиндрическая, имеет 5 связи и 1 степень подвижности - вращательное).
3.3. Пара (образована звеньями 2 – 3, т. С1) является низшей класса 5, т. е. НП5 (цилиндрическая, имеет 5 связи и 1 степень подвижности - вращательное).
3.4. Пара (образована звеньями 3 – 0, т. О2) является низшей класса 5, т. е. НП5 (плоская, имеет 5 связи и 1 степень подвижности - поступательное).
3.5. Пара (образована звеньями 2 – 4, т. В1) является низшей класса 5, т. е. НП5 (цилиндрическая, имеет 5 связи и 1 степень подвижности - вращательное).
3.6. Пара (образована звеньями 4 – 5, т. В2) является низшей класса 5,т. е. НП5 (плоеская с ограничителями, имеет 5 связи и 1 степень подвижности - поступательное).
3.7. Пара (образована звеньями 5 – 0, т. О3) является низшей класса 5, т. е. НП5 (плоская с ограничителями, имеет 5 связи и 1 степень подвижности - поступательное).
4. Определяем степень подвижности механизма по формуле Чебышева (для плоских механизмов)
W = 3*(n-1) – 1р4 – 2р5 = (2.1)
= 3 * (6 – 1) - 1*0 – 7*2 = 1.
Задача №3 (Вариант 009).
Для исполнительного механизма составить функцию положения ведомого звена в зависимости от угла поворота кривошипа ![]()
![]() и для заданного фиксированного значения угла
и для заданного фиксированного значения угла ![]()
![]() вычислить значение функии положения ведомого звена, считая нулевым положением кривошипа (
вычислить значение функии положения ведомого звена, считая нулевым положением кривошипа (![]()
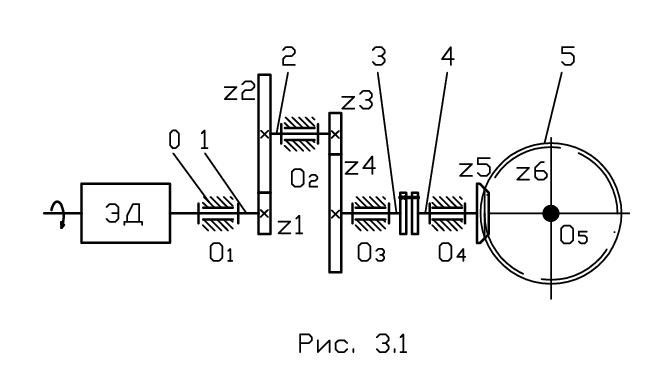
![]() относительно координатных осей xOy. Для машинного агрегата, состоящего из привода, схема которого приведена на ри. 3.1, и исполнительного механизма, схема которого приведена на рис. 3.2, выполнить структурный анализ и определить угловую скорость кривошипа
относительно координатных осей xOy. Для машинного агрегата, состоящего из привода, схема которого приведена на ри. 3.1, и исполнительного механизма, схема которого приведена на рис. 3.2, выполнить структурный анализ и определить угловую скорость кривошипа ![]()
![]() . Присоединение исполнительного механизма к выходному валу привода осуществляется путем жесткого соединения вала зубчатого колеса Z6 и кривошипа r в одно звено.
. Присоединение исполнительного механизма к выходному валу привода осуществляется путем жесткого соединения вала зубчатого колеса Z6 и кривошипа r в одно звено.
Решение. 1. Для структурного анализа машинного агрегата необходимо определить количество, тип и класс кинематических пар, образованных всеми звеньями агрегата, включая стойку (0-звено).
Привод содержит:
звено 1 образовано валом электродвигателя и зубчатым колесом Z1;
звено 2 – Z2 – вал – Z3;
звено 3 – Z4 – вал – полумуфта;
звено 4 – полумуфта – вал – Z5;
звено 5 – Z6 – выходной вал;
Исполнительный механизм содержит:
звено 5 –выходной вал + кривошип;
звено 6 – шатун-кулиса;
звено 7 – кулисный камень;
звено 8 – кулисный камень;
звено 9 – кулиса-коромысло.
Буквами Оi (i = 1 … 7) обозначены 0-звенья.

2. Характеристика кинематических пар:
2.1. привода
пара 1.1. звенья 0 +1 ==> низшая 5 класса (НП5 – 1 вращательное);
пара 1.2. Z1+ Z2 ==> высшая 5 класса (ВП5 – 1 вращательное);
пара 1.3. вал 2 +О2 ==> низшая 5 класса (НП5 – 1 вращательное);
пара 1.4. Z3+ Z4 ==> высшая 5 класса (ВП5 – 1 вращательное);
пара 1.5. вал 3 + О3 ==> низшая 5 класса (НП5 – 1 вращательное);
пара 1.6. вал 4 + О3 ==> низшая 5 класса (НП5 – 1 вращательное);
пара 1.7. Z5+ Z6 ==> высшая 5 класса (ВП5 – 1 вращательное);
2.2. исполнительного механизма
пара 2.1. кривошип 5 +стойка 0 (т. О5) ==> низшая 5 класса (НП5 – 1 вращательное);
пара 2.2. кривошип 6 + шатун-кулиса 7 (т. А) ==> низшая 5 класса (НП5 – 1 вращательное);
пара 2.3. шатун-кулиса 7 + кулисный камень 8 (т. В1) ==> низшая 5 класса (НП5 – 1 поступательное);
пара 2.4. кулисный камень 8 + стойка 0 (т. В2) ==> низшая 5 класса (НП5 – 1 вращательное);
пара 2.5. шатун-кулиса 8 + кулисный камень 9 (т. С1) ==> низшая 5 класса (НП5 – 1 вращательное);
пара 2.6. кулисный камень 9 + кулиса-коромысло 10 (т. С2) ==> низшая 5 класса (НП5 – 1 поступательное);
пара 2.7. кулиса-коромысло 10 + стойка 0 (т. О7) ==> низшая 5 класса (НП5 – 1 вращательное);
3. По формуле Чебышева определяем степень подвижности, т. к. количество звеньев и кинематических пар и в приводе, и исполнительном механизме одинаково, то, подставляя числовые значения для одного из них, получаем
W = 3*(n-1) – 1р4 – 2р5 2р5 = (3.1)
= 3 * (6 – 1) - 1*0 – 7*2 = 1,
т. е. оба механизма имеют по 1 степени подвижности, и весь механизм в целом тоже.
4. Определение угловой скорости кривошипа.
На входной вал привода вращается со скоростью ω, скорость вращения выходного вала связана со скоростью вращения входного вала зависимостью
![]()
![]() = ω * I, (3.2)
= ω * I, (3.2)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
