

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК.531.383-11
Р. Г. ЛЮКШОНКОВ
(АО “Концерн “ЦНИИ “Электроприбор”, Санкт-Петербург)
1
ИССЛЕДОВАНИЕ ВОЗМОЖНОСТИ ИСПОЛЬЗОВАНИЯ ТЕМПЕРАТУРНОЙ ЗАВИСИМОСТИ ДОБРОТНОСТИ КОЛЕБАТЕЛЬНОГО КОНТУРА
МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА
ДЛЯ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ
Рассмотрен способ измерения температуры чувствительного элемента гироскопа, основанный на использовании температурной зависимости добротности по оси первичных колебаний. В качестве температурных измерений используется выходной сигнал схемы автоматического регулирования усиления, который имеет обратно пропорциональную зависимость от добротности колебательного контура гироскопа с системой возбуждения и стабилизацией амплитуды первичных колебаний. Представлены результаты экспериментальных исследований указанного метода измерения температуры.
Введение
Микромеханические гироскопы представляют собой устройства измерения угловой скорости, которые обладают малыми массогабаритными характеристиками, стоимостью при массовом производстве и низким энергопотреблением. Указанные устройства относятся к потребительскому и тактическому классам инерциальных датчиков. Лидирующие характеристики МЭМС гироскопов определяются нестабильностью смещения нуля при нормальных условиях 1°/ч. Однако на смещение нуля оказывают влияние различные внешние воздействия. Например, изменение температуры в рабочем диапазоне от -40 до +85°C приводит к смещению нулевого сигнала на величину, которая может превышать 10°/с.
Систематические составляющие погрешности измерений, вызванные температурой, в МЭМС гироскопах могут быть уменьшены с помощью температурной коррекции выходного сигнала или стабилизации температуры устройства [1, 2]. Оба способа подразумевают использование датчика температуры (ДТ). Выбор датчика температуры ограничивается не только его потенциальной точностью измерений. Важно, чтобы датчик позволял проводить измерения температуры непосредственно чувствительного элемента МЭМС гироскопа, а его градуировочная характеристика должна быть стабильной во времени и не иметь гистерезиса.
В настоящее время схемы измерения температуры зачастую встраиваются в интегральную микросхему гироскопа, хотя встречаются случаи, при которых ДТ устанавливается и на печатной плате отдельно и на некотором расстоянии от корпуса гироскопа.
На практике в МЭМС устройствах в качестве ДТ применяются платиновые резисторы, тонкопленочные кремниевые терморезисторы, полупроводниковые КМОП-диоды (в которых используется температурная зависимость напряжения на P-N переходе) или схемы генератора, выходное напряжение которого пропорционально абсолютной температуре (так называемые схемы PTAT – Proportional To Absolute Temperature circuit) [3, 4]. Однако при несовпадении мест установки ДТ и чувствительного элемента (ЧЭ) изменение температуры между ними происходит с некоторой задержкой, которая вызвана тем, что теплообмен между корпусом, интегральной схемой и ЧЭ происходит с конечной скоростью и зависит от пути распространения тепла, размеров элементов конструкции, теплопроводности и скорости изменения температуры окружающей среды.
Задержка наблюдается даже в том случае, если ДТ расположен непосредственно на внешней поверхности ЧЭ. Температура в разных областях устройства может отличаться на 0,1…10°C в установившемся режиме, и более 10°C в переходном режиме. Поэтому пространственное разделение мест установки ДТ и ЧЭ не позволяет обеспечить измерение действительной температуры ЧЭ, что приводит к ошибке температурной компенсации или стабилизации температуры.
Настоящая работа посвящена способу измерения температуры на основе температурной зависимости добротности колебательного контура механического чувствительного элемента и экспериментальному определению характеристик предлагаемого ДТ.
Определение требуемой точности измерения температуры
Требуемую точность измерения температуры в системе стабилизации температуры можно оценить, зная температурные коэффициенты чувствительности смещения нулевого сигнала и масштабного коэффициента МЭМС гироскопа и задав их максимально допустимые отклонения в рабочем диапазоне температур. Так, задавая величину допустимого смещения нуля менее 0,5°/с и коэффициент чувствительности (до компенсации) равным 0,1°/с/°C, погрешность измерений и стабилизации температуры должна составлять не более 5°C.
Погрешность ДТ, требуемая для температурной компенсации, в первую очередь должна выбираться с учетом разрешающей способности МЭМС гироскопа, т. к. его выходной сигнал после коррекции представляет собой смесь из сигналов угловой скорости основания и температуры. Если СКО шума гироскопа при нормальных внешних условиях имеет величину 0,05 °/с, следовательно, и плотность шума ДТ должна быть не более 0,05 °С). На рис.1 представлена модель выходного сигнала гироскопа со схемой температурной компенсации смещения нулевого сигнала. Параметры модели указаны в табл. 1.

Рис. 1. Модель выходного сигнала МЭМС гироскопа.
Таблица. 1. Параметры модели.
Гироскоп | |
Диапазон измерения, FS | ±450 °/с |
Разрядность, R | 24 бита |
Коэффициент преобразования, КП | 1 / (FS/2R) |
Полоса пропускания | 100 Гц |
Плотность шума | 0,005 (°/с)/√Гц |
Постоянная сост. смещения нуля, | 0,1 °/с |
Смещение нуля в диапазоне температур |
|
Нелинейность градуировочной хар-ки | 0 |
Диапазон температур | -40…+85°C |
Датчик температуры | |
Разрядность | 14 бит |
Нелинейность градуировочной хар-ки | 0 |
Задержка | 0 с |
Разность температур между ДТ и ЧЭ | 3 °C |
На рис. 2 и в табл. 2 представлены результаты моделирования температурной компенсации смещения нулевого сигнала при различных значениях СКО шума ДТ. При моделировании использовались модели белого шума с постоянной спектральной плотностью в диапазоне температур.
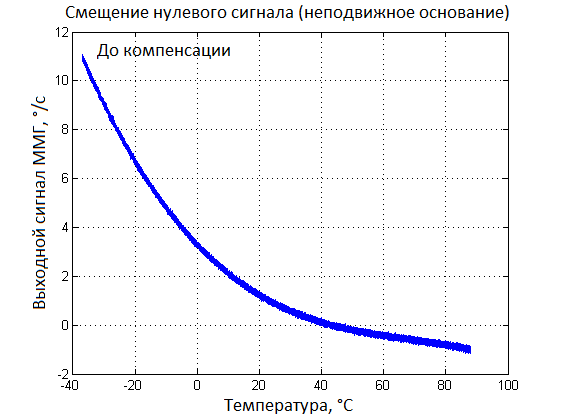
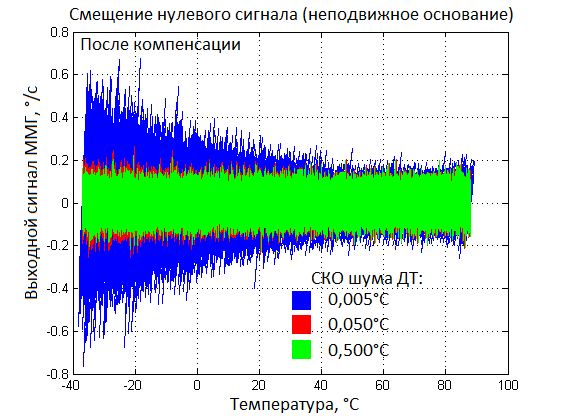
Рис. 2. Выходной сигнал ММГ
а) до компенсации (зависимость описывается полиномом 3 порядка;
б) после компенсации в зависимости от погрешности ДТ.
Таблица 2. СКО шума гироскопа после температурной компенсации.
СКО ДТ 0,5°C | СКО ДТ 0,05°C | СКО ДТ 0,005°C | |
СКО шума гироскопа до компенсации | 0,05°/с | ||
СКО шума гироскопа после компенсации | 0,1963°/с | 0,065°/с | 0,051°/с |
Способ измерения температуры на основе температурной зависимости добротности по оси первичных колебаний
Возможность использования сигналов контура возбуждения первичных колебаний в ММГ RR-типа была продемонстрирована в работах [5, 6]. Блок-схема этого контура приведена на рис.3.

Рис.3. Структурная схема канала управления первичными колебаниями со схемой температурной компенсации.
Действующая величина напряжения Uупр в этом контуре пропорциональна добротности первичных колебаний Qг-1.
| (1) |
где KАРУ, KДУ, KПЕН, KДМ, K∆∑ - коэффициенты преобразования схемы автоматической регулировки усиления (АРУ), датчика угла, преобразователя емкость-напряжение, датчика момента, дельта-сигма модулятора, соответственно; гЗ - задаваемый угол отклонения инерционной массы (ИМ) от положения равновесия; Iг - момент инерции ИМ вокруг оси первичных колебаний; щВ - круговая частота момента возбуждения первичных колебаний.
В исследуемых гироскопах зависимость добротности колебательного контура от температуры Qг(T) близка к 1/√T. Относительное изменение добротности зачастую превосходит 30% в рабочем диапазоне температур.
Коэффициент преобразования датчика температуры
На рис. 4. приведена экспериментально полученная температурная зависимость выходного сигнала АРУ, который представлен в цифровом коде, при нагреве и охлаждении датчика со скоростью 0,25°С/м в рабочем диапазоне температур от -40 до +80°С.
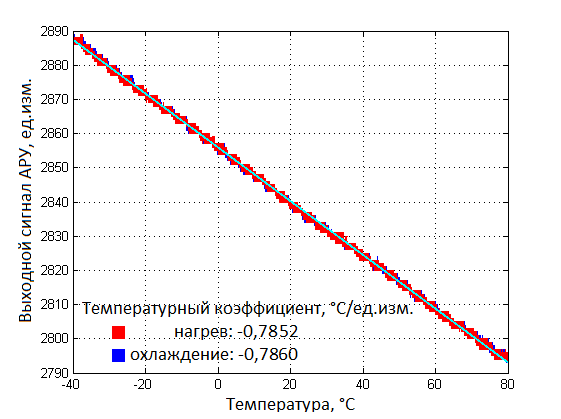
Рис. 4. Зависимость выходного сигнала АРУ от температуры
(при нагреве и охлаждении).
Т. к. выходной сигнал АРУ с ростом температуры монотонно увеличивается, при этом зависимость близка к линейной, то температурный коэффициент определялся с помощью линейной аппроксимации. Температурные коэффициенты для двух образцов гироскопов приведены в табл. 3.
Таблица 3. Температурные коэффициенты сигнала АРУ.
Датчик | Диапазон, ед. изм. | Изменение, ед. изм. | Температурный коэффициент, ед. изм./°С |
Образец#1 | [2794…2891] | 97 | -0,789 |
Образец#2 | [12303…12595] | 292 | -2,377 |
Температурные коэффициенты от образца к образцу могут меняться и зависят от резонансной частоты и амплитуды первичных колебаний. С увеличением этих параметров увеличивается и диапазон изменения выходного сигнала схемы АРУ в рабочем диапазоне температур, что приводит к увеличению температурного коэффициента сигнала АРУ и уменьшению погрешности измерения температуры.
Шумовые характеристики датчика температуры
На рис. 5. представлена спектральная плотность мощности шума сигнала АРУ для одного из образцов гироскопов.
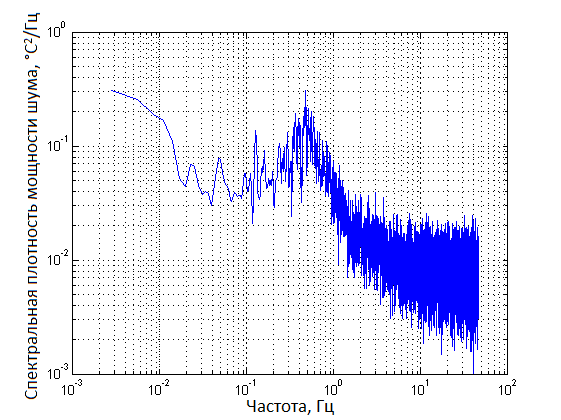
Рис. 5. Спектральная плотность мощности шума сигнала АРУ.
Статистические шумовые характеристики (СКО в зависимости от граничной частоты ![]()
![]() полосы частот) сигнала АРУ, который предварительно преобразован к размерности температуры, приведены в табл. 4.
полосы частот) сигнала АРУ, который предварительно преобразован к размерности температуры, приведены в табл. 4.
Таблица 4. СКО шума ДТ (по экспериментальным данным).
Датчик | СКО, °С | ||
|
|
| |
Образец#1 | 0,687 | 0,269 | 0,075 |
Образец#2 | 0,306 | 0,050 | 0,019 |
Для образцов ММГ с резонансной частотой 3кГц двойная амплитуда шума выходного сигнала АРУ составляет 1-2% от полного диапазона изменения. В образцах ММГ с резонансной частотой 8 кГц измерения относительного изменения температуры удалось проводить с погрешностью менее 0,1°С при неподвижном основании.
Увеличение частоты дискретизации данных ![]()
![]() и последующей фильтрацией сигнала АРУ позволят уменьшить шум.
и последующей фильтрацией сигнала АРУ позволят уменьшить шум.
Заключение
1. Зависимость выходного сигнала схемы АРУ в канале возбуждения первичных колебаний от температуры окружающей среды в диапазоне от -40 до +85°С носит монотонный характер и близка к линейной для ММГ RR - и LL - типов.
2. С увеличением амплитуды и частоты первичных колебаний диапазон изменения выходного сигнала схемы АРУ возрастает и для ММГ RR - типа с резонансной частотой 8 кГц превышает 1000 отсчетных единиц для диапазона температур 120°С, обеспечивая погрешность от дискретизации сигнала 0,1°С.
ЛИТЕРАТУРА
P. Aggarwal, Z. Syed, N. El-Sheimy. Thermal Calibration of Low Cost MEMS Sensors for Land Vehicle Navigation System Fang, J. C.; Li, J. L.; Sheng, W. Improved temperature error model of silicon MEMS gyroscope with inside frame driving. J. Beijing Univ. Aeronaut. Astronaut. 2006, 32, 1277–1280. Hopcroft M. A., Agarwal M., Park K. K., Kim B., Jha C. M., Candler R. N., Yama G., Murmann B., Kenny T. W. Temperature compensation of a MEMS resonator using quality factor as a thermometer // MEMS 2006, Istanbul, Turkey, 22-26 January 2006, - pp. 222-225. Ho G. K., Sundaresan K., Pourkamali S., Ayazi F.. Temperature compensated IBAR reference oscillators // 19th IEEE Int. Conf. MEMS, Istanbul, Turkey, 2006, - pp. 910-913. , Использование измерения параметров ЧЭ для формирования ММГ с автономной компенсацией / , // ХХ Санкт-Петербургская международная конференция по интегрированным навигационным системам. - СПб.: «ЦНИИ «Электроприбор», 2013. - С. 138-139. Nekrasov, Ya. A., Moiseev, N. V., Liukshonkov, R. G., Belogurov A. A., Compensation of MEMS Gyroscope Drift Based on Amplitude Primary Oscillation Measurement, Inertial Sensors and Systems - Symposium Gyro Technology, 2013, pp. 1-1 – 1-9.
Текст доклада согласован с научным руководителем к. т.н. (АО “Концерн “ЦНИИ “Электроприбор”)
Научный руководитель к. т.н, начальник сектора,
