

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Методические основы цифрового управления
Введение. Согласно [1,2], цифровой называют систему, в состав которой входит компьютер. В этих монографиях и им подобным не уделяется должного внимания особенностям цифрового сигнала и методам его обработки, которые представляют интерес при решении задач управления. Компьютер, в первую очередь, является техническим средством реализации тех алгоритмов, на основе которых и решаются поставленные задачи. Цель настоящей работы заключается в определении методических основ цифрового управления для некоторого класса управляемых объектов.
Ряд задач управления могут быть объединены в класс, когда управляемый объект должен достичь требуемого состояния в будущий момент времени. К этому классу относится значительное число управляющих устройств и систем. При решении таких задач следует использовать методы прогнозирования.
При разработке систем управления, требующих для решения применения методов прогнозирования можно воспользоваться либо математическим моделированием, либо методами экстраполяции. Проблема математического моделирования заключается в неадекватности разрабатываемых математических моделей.
В связи с такой эффективностью математического моделирования при решении задачи прогнозирования остановимся на применении экстраполяции.
Сформулируем условия экстраполируемости, которым должен отвечать прогнозируемый процесс.
Условия прогнозируемости. Под экстраполяцией функции понимается операция определение значения функции в будущие моменты времени на основе значений, полученных до текущего момента. На языке математического анализа операцию экстраполяции можно определить, как выражение значений функции ![]() через саму функцию при другом значении аргумента
через саму функцию при другом значении аргумента ![]() .
.
В математическом анализе известно выражение коэффициентов многочлена через значения самого многочлена и его производных. Случай многочлена обобщен на произвольную функцию и назван разложением функции в ряд Тейлора [3]:
![]()
Если ![]() , то ряд Тейлора можно использовать как алгоритм экстраполяции. Ряд Тейлора дает приближенное значение функции
, то ряд Тейлора можно использовать как алгоритм экстраполяции. Ряд Тейлора дает приближенное значение функции ![]() , но это приближение может быть сколь угодно малым, поэтому ряд Тейлора можно использовать, как эталонный алгоритм экстраполяции и сравнивать с ним другие методы экстраполяции, например, экстраполяцию, получаемую с помощью нейронных сетей.
, но это приближение может быть сколь угодно малым, поэтому ряд Тейлора можно использовать, как эталонный алгоритм экстраполяции и сравнивать с ним другие методы экстраполяции, например, экстраполяцию, получаемую с помощью нейронных сетей.
Опираясь на свойства ряда Тейлора, получим свойства экстраполируемости. Функция экстраполируема, если на интервале задания и экстраполяции она непрерывна и имеет производные любого порядка. Интервалом задания в нашем случае являются значения функции состояния, полученные до текущего момента времени.
Под управлением понимают воздействие на управляемый объект, предназначенное для достижения определенной цели. Момент времени, когда должен быть достигнут результат управления, назовем целевой точкой. Для получения уравнения управления воспользуемся понятием функции состояния объекта. В нашем случае функция состояния является функцией времени.
Рассмотрим реальный процесс, протекающий во времени. Будем считать, что он непрерывен и не имеет разрывов в производных.
Информацию об этом процессе получают путем наблюдения. Результаты наблюдения используются для определения функции состояния. С помощью прогнозирования получают значения функции состояния в целевой точке по результатам наблюдения, полученным до текущего момента времени.
В текущий момент времени функция состояния претерпевает разрыв, в то время как сам физический процесс непрерывен. Если пренебрегать такими событиями, как разрыв, неизбежно столкнешься с явлением, известным как явление Гиббса. Явления Гиббса гибельно сказываются на результатах прогнозирования.
Таким образом, чтобы получить значения функции состояния в будущие моменты времени, требуется преодолеть проблему разрыва функции, т. е. восстановить непрерывность функции.
Подведем некоторые итоги вышеизложенному и наметим пути решения проблемы:
Решение задач управления определенным классом объектов, когда целевая точка находится в области будущего времени, основано на методах прогнозирования. Решение задачи прогнозирования связано с решением задачи с разрывными функциями. Для успешного решения задач с разрывными функциями требуется проанализировать такие функции, чтобы определить их свойства и особенности. Для определения свойств и особенностей функций с разрывами воспользуемся гармоническим анализом. Исходной информацией для решения задач управления являются данные наблюдения за управляемым объектом. Результаты наблюдения представлены в виде последовательности равноотстоящих отсчетов. Поскольку в настоящей работе речь идет о методах цифровой обработки, воспользуемся для целей анализа дискретным преобразованием Фурье (ДПФ).Особенности дискретного преобразования Фурье.
Непрерывное преобразование Фурье сыграло значительную роль в развитии радиотехники, как в анализе радиосигнала, так и в синтезе разнообразных радиотехнических устройств. Дискретное же преобразование Фурье не достигло подобных результатов в обработке цифрового сигнала. Инженеры используют ДПФ только потому, что оно аппроксимирует непрерывное преобразование Фурье, при этом, зачастую, не понимая тех особенностей, которые обусловлены аппроксимацией, тем более, что не все особенности описаны в научной литературе.
Чтобы познакомиться со свойствами ДПФ и понять те трудности, которые встречаются при использовании ДПФ, полезно рассмотреть вывод дискретного преобразования Фурье.
Пусть функция времени ![]() представлена рядом из
представлена рядом из ![]() последовательных отсчетов, взятых через равные интервалы времени
последовательных отсчетов, взятых через равные интервалы времени ![]() (рис. 1). Сдвигая по оси времени данную последовательность на
(рис. 1). Сдвигая по оси времени данную последовательность на ![]() , образуем бесконечную периодическую последовательность. Соответствующая ей функция времени
, образуем бесконечную периодическую последовательность. Соответствующая ей функция времени ![]() с периодом
с периодом ![]() может быть аппроксимирована рядом Фурье
может быть аппроксимирована рядом Фурье
![]()
где i - номер гармоники.
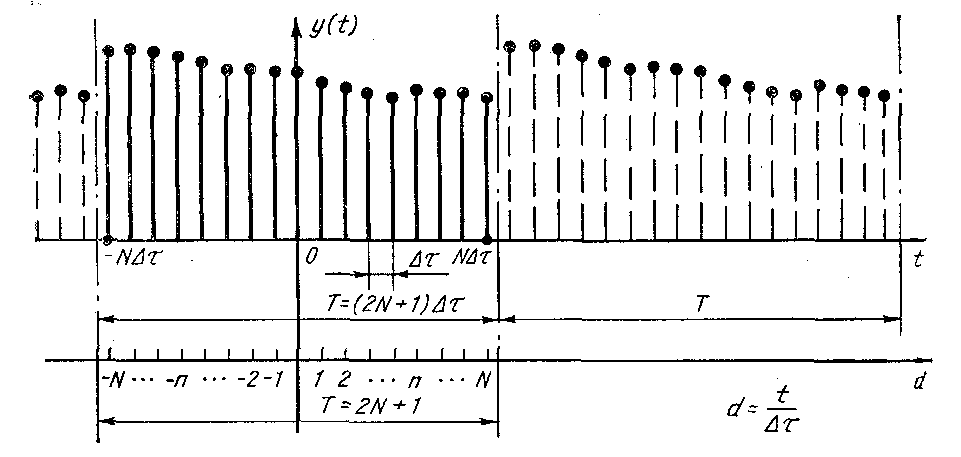
Рис. 1. Образование периодической последовательности отсчетов.
Введем безразмерное время ![]() , в котором моментам отсчетов соответствуют целые числа
, в котором моментам отсчетов соответствуют целые числа ![]()
![]()
перейдем к комплексному виду
![]() .
.
Введя отрицательные частоты, получим
![]() , (1)
, (1)
где ![]() и
и ![]() – пара комплексно-сопряженных векторов.
– пара комплексно-сопряженных векторов.
В ходе времени эти векторы вращаются с угловой скоростью
![]() (2)
(2)
в положительном направлении при i > 0 (положительная частота) и в отрицательном направлении при i < 0 (отрицательная частота).
Значения аппроксимирующей функции ![]() могут и не совпадать с заданными отсчетами, отличаясь на
могут и не совпадать с заданными отсчетами, отличаясь на
![]() ,
,
где n – номер отсчета.
Если принять, что наилучшей аппроксимации соответствует наименьшее значение суммы квадратов отклонений по всем заданным отсчетам (узловым точкам)

то амплитуды гармоник ряда (1) C могут быть определены из условия равенства нулю частных производных от S по C:

Здесь r – фиксированное значение номера гармоники i, комплексная амплитуда которой отыскивается.
Раскрыв скобки и изменив порядок суммирования, получим
![]() . (3)
. (3)
Воспользовавшись тригонометрическим тождеством
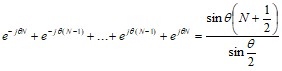 , (4)
, (4)
получим значение суммы ![]() :
:
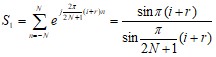 .
.
Так как i + r – целые числа, то сумма
![]() при
при ![]() ,
,
![]() при
при ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
