
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Представленные методы синтеза и контроля системы уже были реализованы и успешно протестированы на других платформах управления и в других структурах. Поэтому в данном документе дается обзор методов и деталей реализации. Однако сравнение разных методов не относится к данной статье. Для более глубокого обзора авторы ссылаются на ссылки.
2. Идентификация системы
Методы идентификации подпространств стали надежными и надежными инструментами для проблем с идентификацией системы. Методы работают во временной области, поэтому измеренные входные и выходные векторы данных могут использоваться без предварительной обработки. Результатом идентификации подпространства является дискретная, не зависящая от времени модель состояния-пространства в целом. Существует несколько методов идентификации подпространства; наиболее распространенными являются метод многопараметрического вывода состояния-пространства (MOESP) и численный алгоритм для определения состояния пространства-пространства подсистемы (N4SID) [ 14 , 15]. В отличие от других алгоритмов идентификации, таких как методы прогнозирования ошибок (PEM), основанные на методах оптимизации, методы подпространства используют надежные численные алгоритмы, такие как QR-декомпозиция и разложение сингулярных значений (SVD). В частности, в отношении идентификации систем с несколькими входами (MIMO) с множеством входных сигналов методы подпространства очень эффективны из-за обработки данных измерений из многостраничных тестов. В этих экспериментальных испытаниях контролируемая установка возбуждается одновременно со всеми исполнительными механизмами, в то время как регистрируются все сигналы датчиков. Предпосылками для последующей идентификации являются некоррелированные сигналы исполнительного механизма.
В этой работе для идентификации системы используется так называемый метод ортогонального разложения (ОРТ) [ 15 ]. Для тестирования с несколькими эталонами узел подается с некоррелированными сигналами белого шума через USB, которые ограничены полосой в соответствии с требуемой частотой управления 1 кГц. Чистый случайный шум имеет не плоский спектр мощности, что неизбежно приводит к плохим результатам идентификации. В отличие от случайного шума многосинусоидальный сигнал с равным спектром амплитуд оказался идеально подходящим для структурного возбуждения:
![]()
где u i - сигнал для - го канала, количество частот и приращение частоты. Благодаря составу по многочисленным синусоидальным сигналам разных частот спектр сигнала равен. Ограничение амплитуды сигнала возбуждения необходимо, чтобы избежать насыщения исполнительного механизма. Однако чистое отсечение сигнала приведет к нелокальному спектру мощности. Альтернативой является поиск максимальной амплитуды и нормального сигнала. Тем не менее, сигнал возбуждения содержит более или менее острые пики, так что коэффициент гребня становится большим. Гребневой коэффициент формы волны равен его амплитуде пика, деленной на ее среднеквадратичное значение (RMS): ![]()
![]()
![]()
![]()
![]()
Широкополосные сигналы с большими гребневыми коэффициентами обычно имеют слабую энергию сигнала. Такие сигналы возбуждения не приведут к удовлетворению результатов идентификации, потому что энергия вибрации, вносимая в структуру, недостаточна. Следовательно, сигналы датчиков и, следовательно, отношения сигнал-шум (SNR) малы.
Для этого применения метод, предложенный Oudera [ 16 ], который способен уменьшить коэффициент гребня ограниченных по диапазону сигналов Фурье, применяется к мультисинусоидальному сигналу в ( 1 ). Метод называется минимизацией максимального коэффициента, и он эффективно сжимает сигналы, не нарушая их спектральных величин. Бывшие эксперименты показали, что он хорошо работает и приводит к удовлетворению результатов идентификации [ 17 , 18 ].
В результате измерений и следующей системы идентификации дискретная модель состояния-пространства формы
![]()
![]()
с входными и выходными векторами и, вектором состояния и матрицами в пространстве состояний системы, , и получаются. При идентификации подпространства неустойчивые полюсы могут возникать в модели состояния-пространства. Чтобы этого избежать, идентификация системы выполняется сначала с более высоким порядком. После балансировки модели стабильные и неустойчивые полюсы разделяются в матрице. Нестабильная часть усекается, и после этого модель сводится к желаемому порядку системы. Бывшие идентификаторы на реальных растениях показали, что усечение неустойчивых полюсов не приводит к значительным изменениям функции частотного отклика (FRF).![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3. Контроль
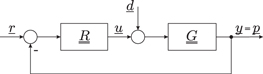
Снижение вибрации для интеллектуальной структуры [ 19 ] реализовано с помощью надежного управления в этой работе. Реализация концепции управления основывается на определении контура управления на рисунке 2 . Здесь контроллер и управляемая установка работают в замкнутом контуре с отрицательной обратной связью. Производительность равна контролируемой переменной. В отношении источников возмущений не делается никаких предположений. Поэтому они моделируются как шумы процесса и добавляются к управляющей переменной. Эталонная переменная устанавливается равной нулю, так как она является чистой проблемой уменьшения вибрации. Задачей управления является уменьшение влияния возмущений![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() на выходные характеристики управления с оптимальной энергией управления.
на выходные характеристики управления с оптимальной энергией управления.![]()
Приблизить Уменьшить Сбросить размер изображения
Рисунок 2. Контур управления с контроллером и контролируемой установкой.![]()
![]()
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
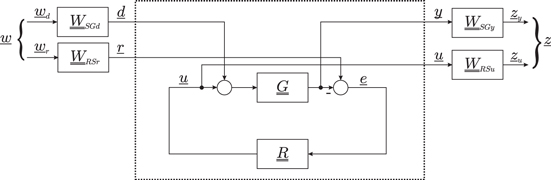
В управлении цели должны быть сформулированы с точки зрения так называемых схем взвешивания. Для реализации концепции управления выбрана взвешивающая схема на рисунке 3 . Четыре весовые функции формулируют ограничения для процесса синтеза контроллера. Их расчет автоматизирован и зависит только от двух параметров, касающихся отказа от помех и ограничения энергии управления [ 20 , 21 ]. Алгоритм синтеза контроллера оптимизирует контроллер таким образом, что норма передаточной функции от входов производительности до выходов производительности меньше заданного ? :![]()
![]()
![]()
![]()
![]()
![]()
![]()
Матрица переноса всей системы на рисунке 3 гласит:
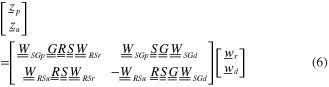
С чувствительностью
![]()
и единичной матрицей.![]()
Приблизить Уменьшить Сбросить размер изображения
Рисунок 3. Схема взвешивания для синтеза контроллера.
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Что касается уравнения ( 6 ), то очевидно, что для эффективного отклонения возмущения необходимо минимизировать норму передаточной функции от в. Усилия контрольной энергии напрямую связаны с термином. Повышение нормы соответствует увеличению энергии управления.![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
