
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Как и идентификация системы, на хосте выполняется синтез контроллера. Впоследствии матрицы состояния-состояния контроллера передаются на соответствующий узел.
4. Аппаратное решение
Компонентами оборудования являются датчики ускорения, пьезоэлектрические патчи в качестве исполнительных механизмов и встроенная система микроконтроллеров, в которой размещается контроллер (узел). Основное внимание уделяется разработке цифровой системы контроля. Поэтому используются внешние аналоговые усилители для исполнительных механизмов и датчиков. В связи с этим, преобразователи уровня напряжения необходимы для адаптации диапазонов напряжений усилителей датчиков к диапазону АЦП (аналогового цифрового преобразователя) и уровням импульсной модуляции (ШИМ) - выходным диапазонам входного диапазона усилитель усилителя. Для AD-преобразования требуется ограничение полосы пропускания и реализовано как фильтр сглаживания (LP IN ). ЦАП (цифровой аналоговый преобразователь) представляет собой блок ШИМ и требует фильтра восстановления (LP OUT), чтобы сгладить выход. Как видно из таблицы 1 , один узел способен управлять четырьмя каналами.
Таблица 1. Компоненты оборудования.
Количество | Тип | Описание |
4 | датчик | датчик ускорения для входа системы |
4 | Привод | Пьезоэлектрический патч для выхода системы |
4 | Фильтр | Фильтр сглаживания для входов |
4 | Фильтр | Фильтр восстановления для генерируемого ШИМ выхода |
4 | конвертер | преобразование входного уровня в диапазон АЦП |
4 | конвертер | преобразование выходного уровня в диапазон усилителей |
1 | Встроенная система | Микроконтроллер с контроллером |
Из предыдущих экспериментов известно, что система с 4 входами 4 выхода может быть достаточно смоделирована со 100 состояниями в требуемой полосе пропускания 500 Гц. Для обеспечения хорошего качества сигнала гарантируется цифровое представление не менее 12 бит по всей обработке данных. Это соответствует динамическому диапазону 74 дБ [ 22 ] в аналоговой области, который должны обеспечить все схемы. Рабочая ширина полосы узла ограничена 500 Гц. Нежелательное усиление прямого напряжения предотвращается программным высокочастотным сигналом, включенным в контроллер в процессе его синтеза. Из-за критерия Найквиста время выборки узла устанавливается равным 1 мс. Для уменьшения энергии шума от аналого-цифрового преобразования выполняется передискретизация с удвоенной частотой дискретизации. Это требует программного одностороннего фильтра нижних частот (LP IIR), который настроен на частоту среза 400 Гц. Этот фильтр реализован как оптимизированный IIR-фильтр. На рисунке 4показан весь путь прохождения сигнала через систему управления. Все необходимые спецификации приведены в таблице 2 .
![]()
Приблизить Уменьшить Сбросить размер изображения
Рисунок 4. Цепочка сигналов встроенной системы.
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Таблица 2. Технические характеристики узла управления.
каналы | 4 |
состояния | 100 |
разрешающая способность | 12 бит |
пропускная способность | 30-500 Гц |
время выборки контроллера | 1 мс |
передискретизации | Один |
На основе уравнений для расчета состояния пространства ( 3), Уравнения IIR-фильтра и требования к времени, можно вычислить необходимую вычислительную мощность процессора. Несмотря на распределение контроля над независимыми узлами и обработку всех высокоуровневых задач хостом, для управления требуется хороший процессор производительности на узле. Чтобы обеспечить выполнение всех задач с указанными спецификациями, необходим микроконтроллер с частотой не менее 60 МГц, 12-разрядный АЦП с мультиплексором для четырех каналов, четыре генератора PWM и USB-соединение. Для выполнения повторяющейся задачи управления предпочтительной является архитектура процессора RISC (Reduced Instruction Set Computer). Один из самых успешных семейств процессоров разработан ARM. Конструкция M4 последней серии ARM Cortex соответствует всем требованиям к процессору. Конструкция M4 была найдена встроенной в чипы PSoC5 от Cypress Semiconductors. Эта система на кристалле, работающая на частоте 80 МГц, включает в себя все аппаратные средства, такие как АЦП, мультиплексоры и цифровые логические блоки, которые выполняют функции PWM, таймера и коммуникационные протоколы USB 2.0. Аутсорсинг основных функций в цифровых логических блоках значительно повышает производительность системы и позволяет идентифицировать систему контролируемой установки.
Основой для разработки программного обеспечения является оценочная плата от Cypress, поставляемая с PSoC5, LCD, USB-портом, блоком питания и несколькими выводами ввода-вывода. Кроме того, аналоговые схемы для адаптации входного и выходного напряжения к приборам были разработаны на базе низкочастотных фильтров 6-го порядка (LP IN ), которые работают как фильтры сглаживания на входе и в качестве фильтров восстановления (LP OUT ) на выходе. Оба фильтра соответствуют макету фильтра Sallen-Key [ 23] с тремя последовательными каскадными операционными усилителями (op-amp), где каждый настроен на 450 Гц. Оказалось, что для этого приложения требуется использование малошумящих операционных усилителей, таких как AD8664 от Analog Devices, для удовлетворения динамического диапазона в 74 дБ. Один и тот же операционный усилитель используется для преобразования напряжения в качестве неинвертирующего летательного контура на основе op-amp, где смещение и усиление регулируются потенциометром. Преобразователь уровня и фильтр объединены в размере SMD на одной печатной плате размером 30 мм ? 20 мм. Для ввода и вывода одна из этих фильтрующих карт может быть вставлена ??в слот на основной плате, что делает систему легко адаптируемой к новым приложениям и требованиям к пропускной способности. Для передачи данных и управления контроллером на плате разработки используется встроенный порт USB 2.0.
5. Программное решение
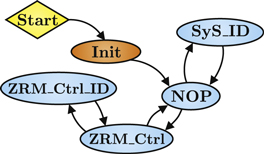
Ядром системы управления является программный алгоритм. Помимо вычисления модели состояния и IIR-фильтра, необходимо обслуживать связь через USB, чтобы управлять PSoC и передавать данные для идентификации системы. Программное обеспечение должно обеспечивать точное время выборки для АЦП и PWM, несмотря на неопределенное время вычисления управления пространственным пространством и IIR-фильтра. Для управления всеми задачами программное обеспечение системы организовано как конечный автомат в соответствии с задачами, необходимыми для распределенного управления. В таблице 3 приведен краткий обзор всех реализованных состояний. В основном используются три состояния: SySID для идентификации системы, ZRM _ Ctrl![]() для управления и ZRM _ Ctrl _ ID для идентификации замкнутого контура управления, как показано на рисунке 5 .
для управления и ZRM _ Ctrl _ ID для идентификации замкнутого контура управления, как показано на рисунке 5 .
Приблизить Уменьшить Сбросить размер изображения
Рисунок 5. Упрощенная диаграмма состояния машины.
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Таблица 3. Список состояний.
имя | функция |
В этом | Инициализация аппаратного обеспечения (LCD, USB), глобальных переменных и IIR-фильтра. |
NOP | Н О О peration Р erformed |
ZRM_Ctrl | Управление пространством-пространством без передачи данных. |
SyS_ID | Системная идентификация |
ZRM_Ctrl_ID | Идентификация системы с активным контролем. |
Во всех трех состояниях необходимо вычислить различные задачи с особыми требованиями времени. Для идентификации системы выполняется в реальном времени до четырех некоррелированных шумовых сигналов с ограничением полосы пропускания, генерируемых на ПК. После этого принятые сигналы передаются на PWM-модули. Тем временем входные сигналы должны быть отбракованы и отфильтрованы. Сигналы сэмплированных датчиков передаются на ПК для дальнейших вычислений. Потоковая передача в реальном времени позволяет очень длинные последовательности измерений, независимо от встроенной памяти. Данные буферизуются только на короткое время, пока не начнется следующая передача через USB. Синхронизация передач контролируется узлом. Для выборки и фильтрации входов и выходов используется только один таймер, вычисление на контроллере и управление потоком данных на USB во всех состояниях.
В ZRM _ Ctrl - state АЦП в сочетании с IIR-фильтром активны, и выполняется одиночная передискретизация. Контроллер рассчитан с частотой 1 кГц. С четырьмя входными каналами ADC-IIR-процедура вызывается с частотой 8 кГц, что прерывает расчет состояния контроллера. IIR-фильтр реализуется в четырех последовательно соединенных секциях канонических модулей второго порядка для достижения требуемого низкого прохода восьмого порядка. Для каждого значения, отобранного АЦП, каждому модулю IIR-фильтра необходимо вычислить значения w ( n ) и y ( n ) ( 7 , 8 ), которые используются для переменных памяти![]() и как выход модуля.
и как выход модуля.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
