
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]()
При вычислении коэффициентов фильтра a i и b i к требуемой функции передачи фильтра коэффициенты a 0 , b 0 и b 2 можно масштабировать до 1 и b 1 можно масштабировать до 2. В связи с тем, что остальные коэффициенты имеют значения в интервале, который они представлены как числа с плавающей запятой. Операции с плавающей точкой требуют чрезмерных системных ресурсов на микроконтроллере, поэтому все коэффициенты умножаются на так, что они могут быть преобразованы в целочисленную область без потери точности. После вычисления w ( n ![]()
![]() ) и y ( n ), они делятся на битовое смещение. Фактически и переменные памяти могут быть объявлены как 16-битные целые числа (короткие), что уменьшает использование памяти и время доступа. Это важно, потому что они должны быть статическими переменными и не могут быть загружены в быстродоступный кэш процессора.
) и y ( n ), они делятся на битовое смещение. Фактически и переменные памяти могут быть объявлены как 16-битные целые числа (короткие), что уменьшает использование памяти и время доступа. Это важно, потому что они должны быть статическими переменными и не могут быть загружены в быстродоступный кэш процессора.![]()
![]()
![]()
![]()
Расчет контроллера выполняется с частотой 1 кГц. Во время шага времени 1 мс для вычисления контроллера необходимо оценить уравнения в ( 3 ). Таким образом, самая дорогая матричная операция связана с большим количеством состояний по сравнению с количеством входов и выходов. На основе канонической формы модели состояния-пространства для экономии времени расчета можно использовать разреженное матричное представление. Следуя рекомендациям Гораяна, Джайна и Солнца в [ 24 ], для этих целей был найден наилучший разрешенный матричный формат для сжатого хранилища строк (CRS). Формат оптимизирован для быстрого доступа к строкам матрицы. При использовании CRS время вычисления уменьшается примерно на 75% по сравнению с простым матричным исчислением.![]()
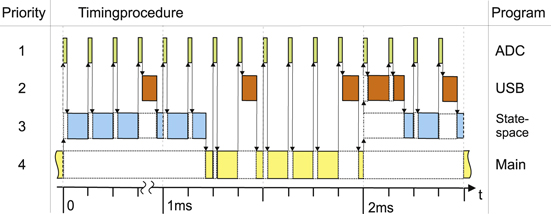
Для идентификации замкнутого контура управления необходима комбинация двух состояний ZRM _ Ctrl и SySID. Управление выполняется, как описано выше, но может быть прервано связью USB. Входы сэмплированы с частотой 2 кГц и отправляются через USB на ПК. Равномерное количество тестовых сигналов отправляется с ПК на узел. Образцы добавляются к выходу контроллера состояния, но обновляются в два раза быстрее, чем работает контроллер. Таким образом, новые значения ШИМ устанавливаются с частотой 2 кГц. Как видно на рисунке 6, преобразование АЦП с фильтрацией IIR имеет наивысший приоритет. Второе место занимает задача USB-связи. Алгоритм управления пространственным пространством прерывается всеми из них. Если ни одна из этих функций не активна, основной контур обеспечивает отображение вывода.
Приблизить Уменьшить Сбросить размер изображения
Рисунок 6. Временная диаграмма системы прерываний управления с идентификацией системы.
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Стандарт USB 2.0 определяет несколько типов передачи и минимальный временной интервал 1 мс (1 кГц) для передач. В этом случае тип передачи данных прерывания используется для проверки ошибок для каждого переданного пакета данных. Максимальный объем данных, которые могут быть отправлены с одной передачей, составляет 64 байта. Во время выборки входных сигналов данные записываются в буфер из 2 байтовых целых чисел. Этот буфер содержит данные для четырех каналов, отбираемых в течение 2 мс (4 раза с частотой дискретизации 2 кГц), что приводит к максимальному размеру передачи данных. После того как этот пакет образцов отправлен и принят, образцы тестового сигнала, упакованные таким же образом, немедленно отправляются в следующем фрейме USB. Для этого данные загружаются из Matlab® в буфер программного обеспечения драйвера ПК. После того как передача всех образцов будет завершена, записанные данные передаются обратно в программное обеспечение Matlab®. Из-за высокой нагрузки соединения при идентификации системы необходимо обеспечить, чтобы ни один другой узел сети USB или хост не пытался отправлять запросы или команды. Для децентрализованной системы управления стандарт USB 2.0 ограничивает количество подключенных узлов до 128 в одной сети. Мастер (ПК) этой сети может быть подключен к другим сетевым мастерам через другие каналы связи или вторую сеть USB. Требования к трафику и надежности очень низки, поскольку сети USB независимы в работе и требуют только командования. Для децентрализованной системы управления стандарт USB 2.0 ограничивает количество подключенных узлов до 128 в одной сети. Мастер (ПК) этой сети может быть подключен к другим сетевым мастерам через другие каналы связи или вторую сеть USB. Требования к трафику и надежности очень низки, поскольку сети USB независимы в работе и требуют только командования. Для децентрализованной системы управления стандарт USB 2.0 ограничивает количество подключенных узлов до 128 в одной сети. Мастер (ПК) этой сети может быть подключен к другим сетевым мастерам через другие каналы связи или вторую сеть USB. Требования к трафику и надежности очень низки, поскольку сети USB независимы в работе и требуют только командования.
6. Экспериментальные результаты
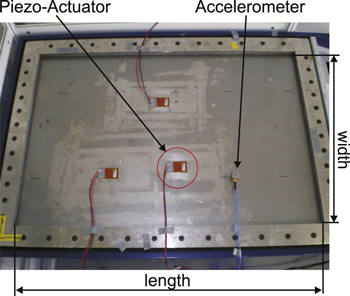
В экспериментальной установке на жесткой и защищенной стальной плите были испытаны жесткие и программные. Максимальное количество четырех пьезоэлектрических патчей и четырех емкостных акселерометров распределено на пластине для его активации и для измерения нормальных ускорений в точках датчика соответственно. Число состояний модели состояния-состояния контроллера ограничено 60. Этот предел задается ресурсами памяти микроконтроллера. С интерфейсом внешней памяти процессор может вычислить расширенные контроллеры с до 100 состояниями и четырьмя входами и выходами. Для проверки контроля на простой стальной пластине достаточно 60 состояний. Динамический диапазон 74 дБ, соответствующий разрешению 12 бит [ 22![]() ], гарантируется для всей обработки сигнала. Максимальная ширина полосы управления узла составляет 500 Гц. Это приводит к максимальной частоте дискретизации контроллера 1 кГц, как упомянуто выше.
], гарантируется для всей обработки сигнала. Максимальная ширина полосы управления узла составляет 500 Гц. Это приводит к максимальной частоте дискретизации контроллера 1 кГц, как упомянуто выше.
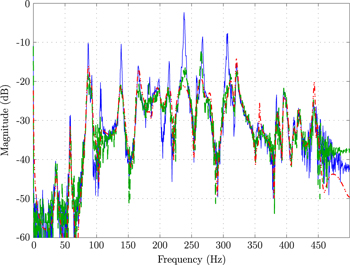
На рисунке 8 показан пример частотной характеристики датчика 1 на исполнительный механизм 1, который подсвечивается на фиг. 7 , в соответствии с временным сигналом образцов. Синяя линия - это функция частотного отклика с открытым контуром (FRF), измеренная с помощью узла в состоянии SySID. Синтез управления предсказывает замкнутый цикл FRF, который соответствует красной линии. Измерение этой функции переноса помех в состоянии ZRM _ Ctrl _ IDприводит к тому, что FRF отображается зеленым цветом. Из этих графиков очевидно, что с системой возможно уменьшение вибрации до 15 дБ в некоторых резонансах и что предсказание эффективности управления является довольно точным.![]()
![]()
![]()
![]()
Приблизить Уменьшить Сбросить размер изображения
Рисунок 7. Экспериментальная установка с активной стальной пластиной (только три привода и один акселерометр, установленный еще).
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Приблизить Уменьшить Сбросить размер изображения
Рисунок 8. Примерный частотный отклик одной комбинации датчиков / исполнительных механизмов (сплошной: разомкнутый контур, пунктир: измеренный замкнутый контур, пунктирная линия: рассчитана замкнутая схема).
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
7. Заключение
В этом документе обобщены теоретические и экспериментальные результаты концепции управления крупномасштабными интеллектуальными структурами. Предлагается аппаратное решение для построения иерархической, децентрализованной системы управления с многочисленными узлами и мастером. Основные задачи идентификации системы, синтеза и управления контроллером распределяются между ведущими или узлами. Эти основные задачи подробно описаны в соответствующих разделах.
Экспериментальные результаты были получены из демонстратора активной стальной плиты. Было показано, что активную пластину с четырьмя датчиками и четырьмя исполнительными механизмами можно контролировать с помощью предлагаемой аппаратной платы. В некоторых резонансах может быть достигнуто уменьшение до 15 дБ на пути нарушения.
Будущая работа будет сосредоточена на расширении иерархической системы за счет включения дополнительных узлов и аспектов устойчивости слабо связанных систем управления.
Рекомендации
- [1]
Frampton KD 2005 Распределенное групповое управление вибрацией с встроенной встроенной системой Smart Mater. Struct. 14 307
IOPscience
- [2]
Gardonio P, Bianchi E и Elliott SJ 2004 Смарт-панель с несколькими децентрализованными устройствами для управления передачей звука. часть i: теоретические предсказания J. Sound Vib. 274 163-92
CrossRef
- [3]
Gardonio P, Bianchi E и Elliott SJ 2004 Смарт-панель с несколькими децентрализованными устройствами для управления передачей звука. часть II: проектирование децентрализованных блоков управления J. Sound Vib. 274 193-213
CrossRef
- [4]
Bianchi E, Gardonio P и Elliott SJ 2004 Интеллектуальная панель с несколькими децентрализованными устройствами для управления звуковой передачей. часть iii: реализация системы управления J. Sound Vib. 274 215-32
CrossRef
- [5]
, , и Фране Р R Централизованный и децентрализованный контроль структурной вибрации и звукоизлучения J. Acoust. Soc. Am. 119 1487-95
CrossRef
- [6]
Sang-Myeong Kim SJ, Elliott and Brennan MJ 2001 Децентрализованное управление многоканальной активной виброизоляцией IEEE Trans. Контрольная система. Technol. 9 93-100
CrossRef
- [7]
Tao T и Frampton KD 2006 Эксперименты по распределенному активному управлению вибрацией просто поддерживаемого луча Smart Mater. Struct. 15 1858
IOPscience
- [8]
Chang PC, Flatau A и Liu SC 2003 Обзорный документ: мониторинг состояния инфраструктуры гражданской инфраструктуры Struct. Здоровье Монит. 2 257-67
CrossRef
- [9]
Lynch JP 2007 Обзор беспроводного структурного мониторинга здоровья для гражданских структур Phil. Сделка R. Soc. A 365 345-72
CrossRef
- [10]
Lynch JP 2002 Децентрализация технологий беспроводного мониторинга и управления интеллектуальными гражданскими структурами Кандидатская диссертация Стэнфордский университет
- [11]
Wang Y, Swartz RA, Lynch JP, Law KH, Lu KC и Loh CH 2007 Децентрализованный гражданский структурный контроль с использованием беспроводных зондирующих и встроенных вычислений в режиме реального времени Smart Struct. Sys. 3 321-40
CrossRef
- [12]
Swartz RA и Lynch JP 2009 Стратегическое использование сети в беспроводной системе структурного управления для сейсмически возбужденных структур J. Struct. Eng. 135 597-608
CrossRef
- [13]
Ismail R et al. 2010 Спецификация беспроводной универсальной последовательной шины 1.1 Технический отчет LSI Corporation, компания Hewlett-Packard, корпорация Intel, корпорация Microsoft, корпорация NEC, ST-Ericsson, Samsung Electronics Co., Ltd.
- [14]
Favoreel W, Sima V, Huffel SV, Verhaegen M and de Moor B 1998 Рабочая записка Slicot 19986: идентификация подпространственной модели линейных систем в slicot Технический отчетЕвропейское сообщество BRITE EURAM III Программа тематических сетей NICONET
- [15]
Katayama T 2005 Методы подпространства для идентификации системы (Берлин: Springer)
CrossRef
- [16]
der Oudera EV, Schoukens J и Renneboog J 1988 Минимизация пикового коэффициента с использованием алгоритма временной перестройки IEEE Trans. Инструм. Meas. 37 145-7
CrossRef
- [17]
Algermissen S, Keimer R, Rose M и Monner HP 2006 Надежный контроль подавления вибраций на параллельном роботизированном триглике Proc. Adaptronic Congr. 2006 (Гёттинген, май 2006 г.)
- [18]
Algermissen S, Misol M, Unruh O, Heintze O ??и Monner HP 2010 Прочный контроль передачи шума турбулентного пограничного слоя через жесткую панель Proc. Int. Congr. по звуку и вибрации (Каир, Египет, июль 2010 г.)
- [19]
Fuller CR, Elliott SJ и Nelson PA 1997 Активный контроль вибрации (Лондон: академический)
CrossRef
- [20]
Algermissen S, Rose M, Keimer R, Monner HP и Breitbach E 2007 Автоматизированный синтез мощных контроллеров для приложений интеллектуальной структуры в параллельных роботах Proc. AIAA / ASME / AHS Adaptive Structures Conf. (Гонолулу, США)
CrossRef
- [21]
Algermissen S, Rose M, Keimer R и Sinapius M 2009 Надежное планирование роста для интеллектуальных структур в параллельных роботах XVI Ann. Int. Symp. Smart Struct. Mater. (Сан-Диего, Калифорния, США: SPIE)
CrossRef
- [22]
Barrie W, Emmanuel J и Ifeachor C 2001 Digital Singal Proc. Практический подход
- [23]
Tietze C и Ulrich S 1999 Halbleiter Schaltungstechnik (Verlag: Springer)
CrossRef
- [24]
Гоарьян Н, Джейн А и Солнце Q 2003 Сравнительный анализ разреженных матричных алгоритмов для извлечения информации J. Syst. Cybern. Поставить в известность. 1 38-46 www. iiisci. org/journal/sci/Abstract. asp? var=&id=002759

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
