
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Интеллектуальные материалы и структуры
БУМАГА
Иерархическая, децентрализованная система управления крупномасштабными интеллектуальными структурами
Стефан Альгермиссен, Тим Фрелих и Ханс Питер Моннер
Опубликовано 15 июля 2014 г. • © 2014 IOP Publishing Ltd « Умные материалы и конструкции» , том 23 , номер 8
Статья PDF
PAPER
Hierarchical, decentralized control system for large-scale smart-structures
Stephan Algermissen, Tim Frohlich and Hans Peter Monner
Published 15 July 2014 • © 2014 IOP Publishing Ltd
Smart Materials and Structures, Volume 23, Number 8
Article PDF
Информация о статье
Abstract
Active control of sound and vibration has gained much attention in all kinds of industries in the past decade. Future prospects for maximizing airline passenger comfort are especially promising. The objectives of recent research projects in this area are the reduction of noise transmission through thin walled structures such as fuselages, linings or interior elements. Besides different external noise sources, such as the turbulent boundary layer, rotor or jet noise, the actuator and sensor placement as well as different control concepts are addressed. Mostly, the work is focused on a single panel or section of the fuselage, neglecting the fact that for effective noise reduction the entire fuselage has to be taken into account. Nevertheless, extending the scope of an active system from a single panel to the entire fuselage increases the effort for control hardware dramatically. This paper presents a control concept for large structures using distributed control nodes. Each node has the capability to execute a vibration or noise controller for a specific part or section of the fuselage. For maintenance, controller tuning or performance measurement, all nodes are connected to a host computer via Universal Serial Bus (USB). This topology allows a partitioning and distributing of tasks. The nodes execute the low-level control functions. High-level tasks like maintenance, system identification and control synthesis are operated by the host using streamed data from the choosing low-price nodes, a very cost effective way of implementing an active system for large structures is realized. Besides the system identification and controller synthesis on the host computer, a detailed view on the hardware and software concept for the nodes is given. Finally, the results of an experimental test of a system running a robust vibration controller at an active panel demonstrator are shown.
- ой статьей
Информация о статье
Абстрактные
Активное управление звуком и вибрацией приобрело много внимания во всех отраслях промышленности за последнее десятилетие. Перспективные перспективы для максимального комфорта пассажиров авиакомпаний особенно перспективны. Целями недавних исследовательских проектов в этой области являются снижение передачи шума через тонкостенные конструкции, такие как фюзеляжи, прокладки или внутренние элементы. Кроме того, рассматриваются различные внешние источники шума, такие как турбулентный пограничный слой, шум ротора или струи, расположение исполнительного механизма и датчика, а также различные концепции управления. В основном, работа сосредоточена на одной панели или секции фюзеляжа, пренебрегая тем фактом, что для эффективного снижения шума необходимо учитывать весь фюзеляж. тем не менее, расширение сферы действия активной системы с одной панели на весь фюзеляж значительно увеличивает усилия для аппаратного обеспечения. В настоящей статье представлена ??концепция управления для больших структур с использованием распределенных узлов управления. Каждый узел имеет возможность выполнять контроллер вибрации или шума для определенной части или секции фюзеляжа. Для обслуживания, настройки контроллера или измерения производительности все узлы подключаются к главному компьютеру через универсальную последовательную шину (USB). Эта топология позволяет разбивать и распределять задачи. Узлы выполняют низкоуровневые функции управления. Задачи высокого уровня, такие как обслуживание, идентификация системы и синтез управления, управляются хостом с использованием потоковых данных из узлов. Выбирая узлы с низкой ценой, реализуется очень рентабельный способ реализации активной системы для крупных структур. Помимо системной идентификации и синтеза контроллера на главном компьютере дается подробный обзор концепции аппаратного и программного обеспечения для узлов. Наконец, показаны результаты экспериментального испытания системы, работающей на надежном контроллере вибрации на активном демонстраторе панели.
Экспорт цитирования и аннотация BibTeXRIS

1. Введение
Активные системы для снижения шума и вибрации широко обсуждались в литературе. Хотя достигнуты многообещающие результаты для одиночных, плоских или криволинейных панелей, недостаток реализаций для крупномасштабных структур отсутствует. На это есть несколько причин. Расширение однопанельных решений для всех структур, таких как фюзеляжи самолетов, аппаратное обеспечение и средства управления достигнут высокой степени сложности. Из-за того, что одиночные панели фюзеляжа являются только подсистемами общей структуры, их колебательное поведение считается слабо связанным по меньшей мере. Поэтому алгоритмы управления одиночными панелями не могут быть легко перенесены в более сложные структуры, просто сделав копии и не обращая внимания на муфту. Для решения этой задачи возникли две концепции управления крупномасштабными системами. Распределенное управление использует несколько узлов, которые обмениваются данными по сети [ 1 ]. Каждый узел выполняет отдельный контроллер с датчиками и исполнительными механизмами для достижения глобальной вибрации или снижения шума. Децентрализованное управление система состоит из различных автономных узлов, которые не взаимодействуют ни, ни синхронизированных [ 2 - 5 ]. Выбор, который будет использоваться, зависит от приложения. Критические точки - это сцепление отдельных узлов, а затем соображения устойчивости. Тем не менее, децентрализованный контроль высокосвязанных структур привлек большое внимание в текущих исследованиях [ 6 , 7 ]
Помимо приложений в машиностроении, идея мониторинга и контроля с распределенными или децентрализованными системами появилась и в гражданском строительстве. Мониторинг состояния гражданской инфраструктуры необходим, но с традиционными методами это также очень трудоемкая задача. С помощью методов беспроводных датчиков для крупномасштабных структур, таких как мосты, процесс определения и отслеживания структурной целостности упрощается и ускоряется [ 8 , 9]. Для многоэтажных зданий в районах с сейсмической активностью даже структурный контроль с использованием распределенных систем предложен [ 10 - 12].
Техническое обслуживание в системах управления крупномасштабными структурами является обязательным для их успеха. Помимо первоначальной настройки, управление интеллектуальной структурой должно быть перекалибровано, когда происходят изменения окружающей среды или структуры, поскольку на поведение вибрации влияют и, следовательно, ухудшаются характеристики управления. Эти изменения могут быть результатом усталостных, температурных или градиентов давления. В распределенных системах управления обслуживание и мониторинг могут быть легко реализованы из-за существующей инфраструктуры связи. Децентрализованные контроллеры обычно не имеют никаких «знаний» о контроллерах, действующих по соседству. Таким образом, повторная калибровка возможна только тогда, когда узлы обладают достаточной вычислительной мощностью и памятью.
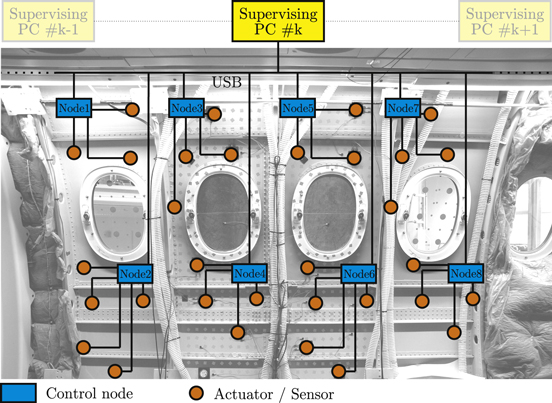
В этом документе предлагается структура для иерархического, децентрализованного контроля (см. Рис. 1 ). Каждый автономный узел выполняет надежный контроллер. С его приводами и датчиками он управляет вибрациями в своей конкретной области в крупномасштабной структуре. Каждый узел имеет достаточную вычислительную мощность для выполнения контроллера состояния. В отличие от чистой децентрализованной архитектуры управления узлы предлагаемой концепции подключаются через универсальную последовательную шину (USB) к хост-системе, действующей в качестве наблюдателя. Хост соответствует верхнему уровню иерархии, тогда как все узлы, расположенные на нижнем уровне, имеют одинаковые приоритеты. К хосту может быть подключено до 128 узлов. Последние разработки с беспроводной спецификацией USB [![]() 13 ] дополнительно расширит максимальное расстояние от узлов до хоста.
13 ] дополнительно расширит максимальное расстояние от узлов до хоста.
Приблизить Уменьшить Сбросить размер изображения
Рисунок 1. Примерная настройка иерархического децентрализованного управления в структуре фюзеляжа.
Загрузить рисунок:
Стандартное изображение Изображение с высоким разрешением Экспорт слайдов PowerPoint
Масштабируемость распределенной системы управления часто ограничивается экспоненциальным увеличением трафика связи. Чтобы избежать этого ограничения, узлы предлагаемой концепции проектируются как автономные узлы при работе в нормальном режиме управления. В этом режиме ни привод, ни данные датчика не передаются; только сигналы для выполнения контрольных функций передают сеть USB. Для обслуживания или начальной настройки каждый узел индивидуально переключается на режим идентификации хостом. Теперь сигналы идентификации передаются в потоке данных с узла на узел в реальном времени. Управляемые установки возбуждаются этими сигналами с помощью исполнительных механизмов. Выделенные сигналы датчиков передаются обратно на хост. Идентификация системы контролируемого предприятия и последующий синтез контроллера выполняются на хосте. Вычисленный контроллер в форме пространства состояний, наконец, переносится на соответствующий узел и запускается. Преимущества этой концепции очевидны. С использованием потоков данных требуемая память узлов сохраняется как минимум. Централизация системной идентификации и синтеза контроллера на хосте снижает потребность в вычислительной мощности узлов и позволяет избежать повторения кода. Эта статья начинается с обзора процессов идентификации системы и синтеза контроллера, которые реализуются на хосте. Затем дается подробное описание аппаратного и программного обеспечения разработанного узла. Наконец, функциональность задач узла и хоста экспериментально доказана на активном демонстраторе панели. Основное внимание в статье уделяется разработке и экспериментальному тестированию одного узла.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
