Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
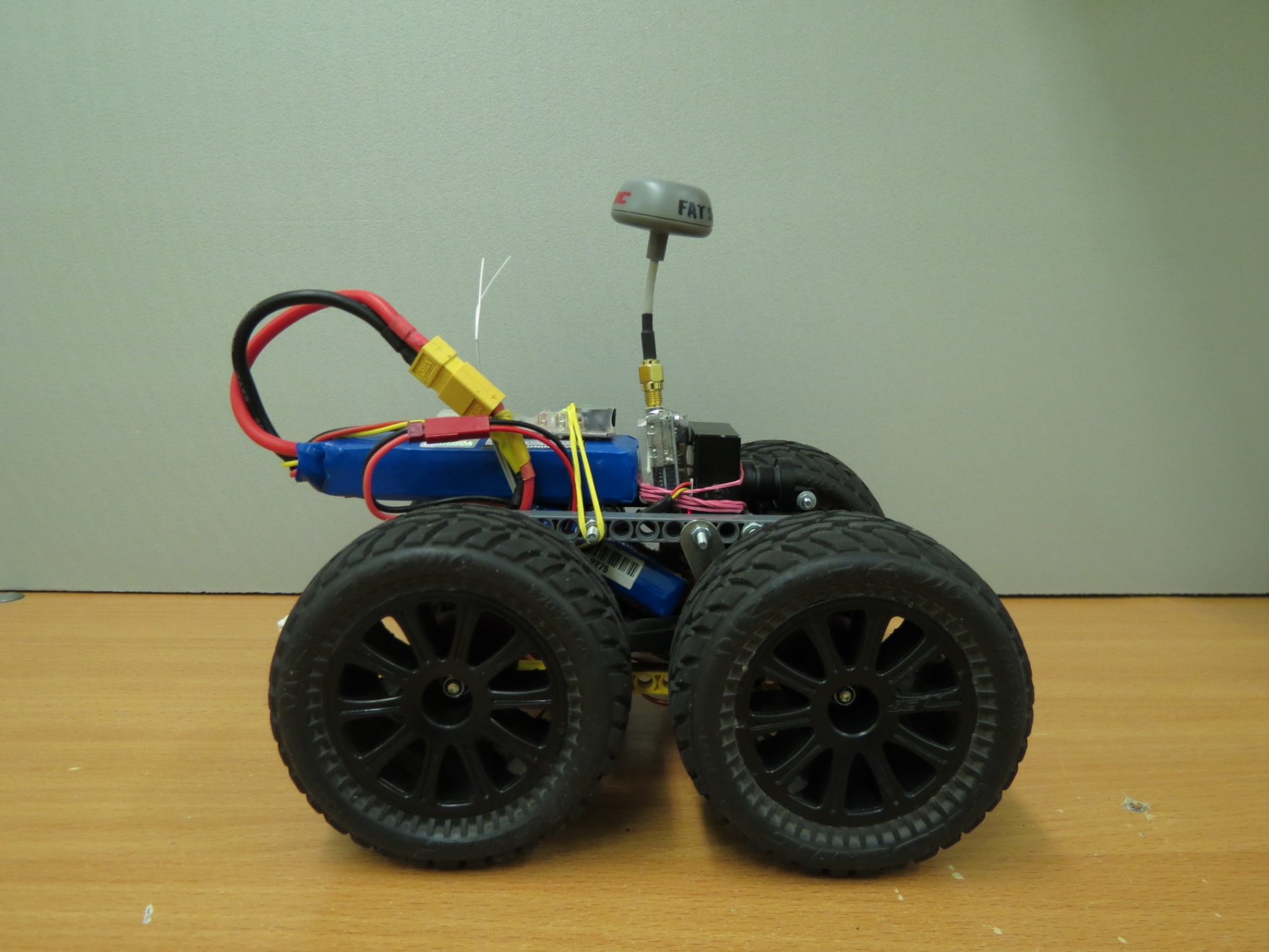
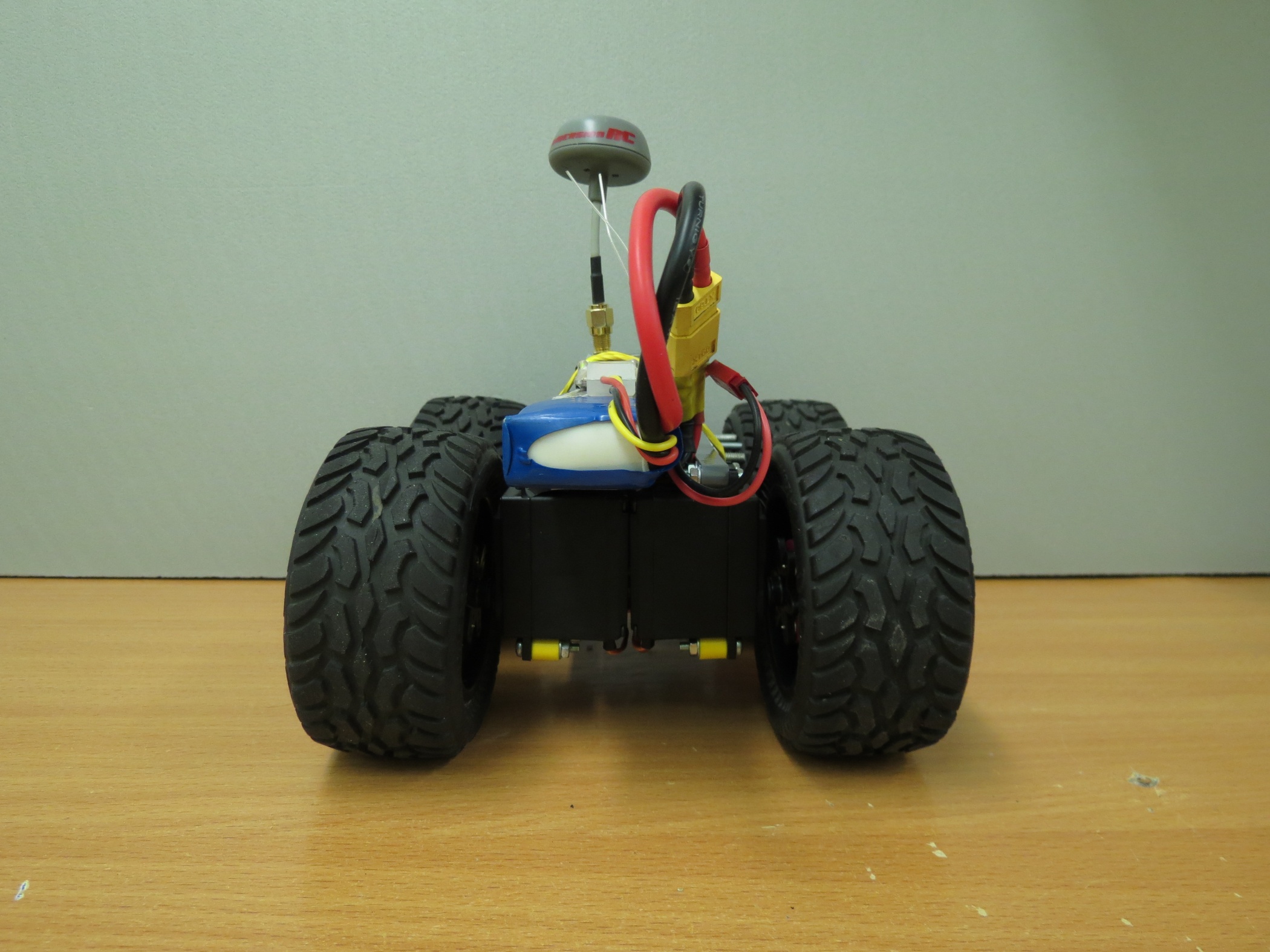
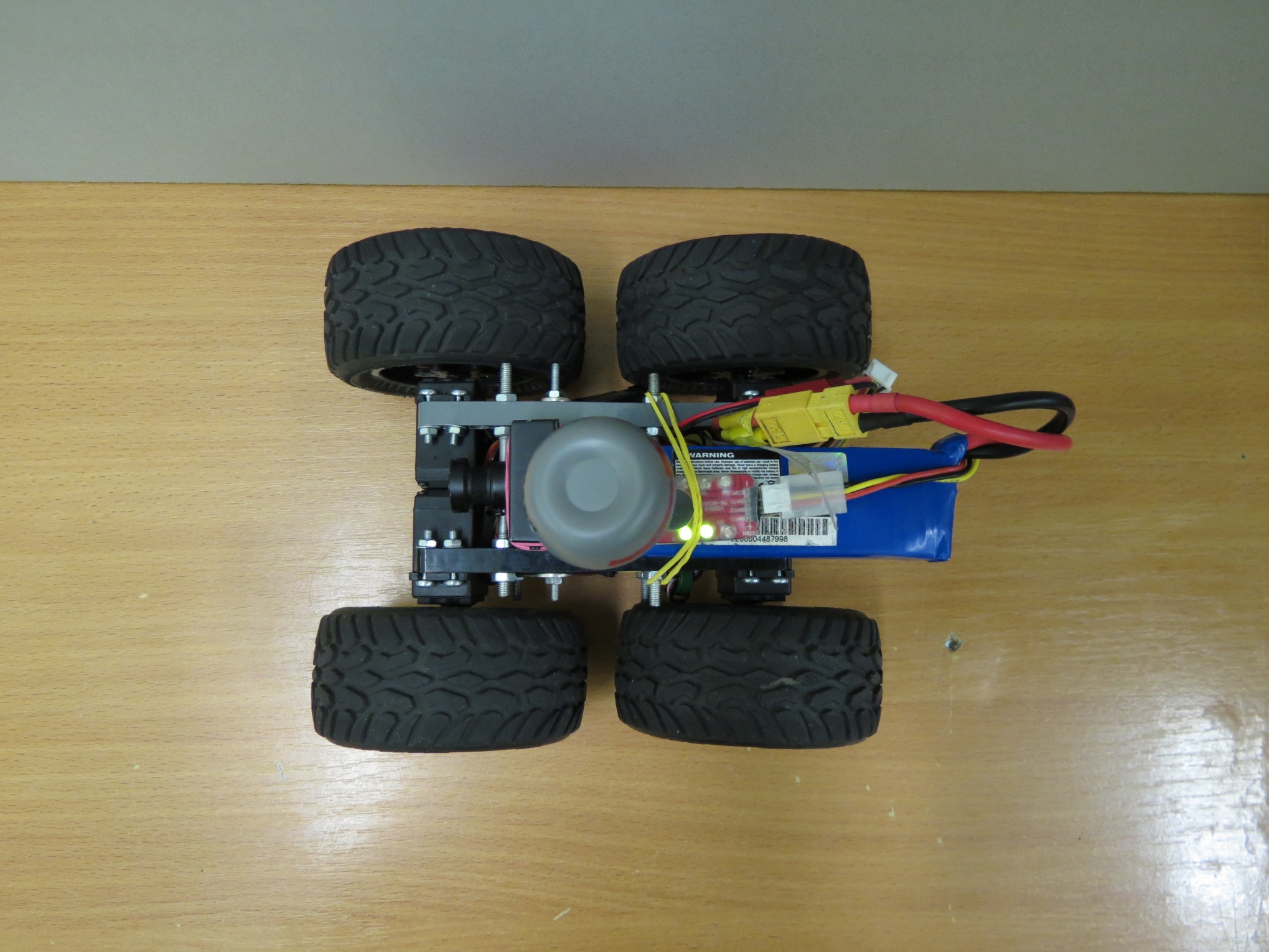
Гироскоп 2004 mini
Рама робота выполнена из балок Lego, соединенных металлическими штангами. Моторы движения - 4 сервопривода постоянного вращения. Колеса - от радиоуправляемого автомобиля. Адаптеры мотор-колесо изготовлены на 3D принтере.
Управление роботом осуществляется 2.4 Ггц модельной аппаратурой. Внутри рамы установлен приемник, которому подключены все моторы. Для того, чтобы управление происходило с одного джойстика пульта, на пульте настроено смешивание сигналов.
В роботе установлена батарея 2200мач 7.4В Li-ion. От неё питается контроллер бесколлекторного двигателя, который имеет в своем составе преобразователь на 5 вольт, который питает приемник и подключенные к нему моторы.
Видеозрение сделано с помощью 5.8 Ггц приемника, передатчика и камеры. На роботе установлена камера и видеопередатчик и отдельная батарея 500мач 11.1В Li-ion. Приемник соединен с монитором и также питается от батареи 500мач 11.1В Li-ion.
В качестве улучшения планируется добавить либо светодиодное, либо лазерное освещение для возможного движения в зоне тумана и подобрать более подходящую по габаритам батарею. Так же возможна установка платы Arduino для автономного движения.