Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Проецирование геометрических фигур
1.1 . Метод проекций
При проектировании зданий и сооружений, машин и механизмов, применяются различные виды проекций, дерево которых показано на рис.1.1
Всякий объект трёхмерного мира (евклидова пространства) можно представить множеством точек, которые могут быть изображены на плоскости (чертеже). Геометрический объект (включая точку, линию, плоскость, поверхность) как точечное множество, отображается на плоскость чертежа по законам проецирования.
Метод проекций заключается в проведении через все точки объекта проецирующих лучей s до пересечения с плоскостью проекций П. Точки пересечения образуют изображения фигуры, т. е. её проекцию (Рис.1.2).
1.1.1 При центральном проецировании (см. рис.1.2а) центр проекций S не должен совпадать с плоскостью проекций П, а проецируемая фигура [AB] может находиться перед плоскостью и за ней.
1.1.2При параллельном проецировании (см. рис.1.2б) центр S удалён в бесконечность, а проецирующие лучи, параллельны заданному направлению проецирования s. При ортогональном проецировании (см. рис.1.2в) угол между проецирующим лучом и плоскостью проекций – прямой. Параллельные проекции – это частный случай центрального проецирования, а ортогональные – частный случай параллельного проецирования.
1.1.3 Геометрические фигуры проецируются на плоскость в общем случае с искажением линейных и угловых величин. Однако между оригиналом и его проекцией существует определенная связь и некоторые его свойства остаются без изменения (называемые «инвариантами проецирования»).
1. Проекция точки есть точка: в символьной форме: А ÞA1
2. Если фигура 1 принадлежит фигуре 2, то и проекция фигуры 1
принадлежит проекции фигуры 2 : ( 1Ф Є 2Ф Û 1Ф1 Є 2Ф1 );
3. Плоская фигура, параллельная плоскости проекций, проецируется на эту плоскость в конгруэнтную (равную) фигуру:(Ф║П Û Ф1≡Ф);
Из этих основных свойств следует:
1a. Проекция множества есть множество: ( N Þ N1 );
1б. Проекция прямой в общем случае – прямая линия: ( l Û l1 );
1в. Проекция прямой, проходящей через центр S или параллельной направлению проецирования s, есть точка: ( l ^ П Û l1 ≡ L );

![]()
![]()
![]()

![]()


![]()
![]()
![]()
![]()
![]()




|
|
|
|
|
| |||
|
|
| |||
 |
|

Рис 1.2 Метод проекций: а – центральное проецирование; б – параллельное проецирование по направлению s; в – прямоугольное (ортогональное) проецирование.
1г. Проекция плоской фигуры, проходящей через центр S или параллельной направлению проецирования, есть линия: (Ф Є α ^ Ф ^ П Û Ф1 ≡ l1 );
2a. Если точка принадлежит прямой, то ее проекция принадлежит проекции прямой: ( А Є l Û A1 Є l1 );
2б. Если точка принадлежит линии и линия принадлежит поверхности
( плоскости ), то проекция точки принадлежит проекции поверхности
( плоскости ): ( А Є l Є Г Þ A1 Є Г1 );
2в. Пересекающиеся прямые проецируются пересекающимися прямыми, при этом точка пересечения прямых проецируется в точку пересечения проекций прямых: ( а ∩ в = К Û а1 ∩ в1 = К1 );
2г. Любые пересекающиеся объемные фигуры А и В проецируются плоскими фигурами, при этом фигура пересечения l проецируется в плоскую фигуру l1 пересечения проекций: ( A ∩ B =l Û A1 ∩ B1 = l1).
Дополнительно для параллельного проецирования:
1д. Проекции параллельных прямых параллельны: ( a ║ b Û a1 ║ b1 ).
2д. Отношения проекций отрезков одной или двух параллельных прямых равно отношению этих отрезков:
( C Є [AB] ^ ![]()
 ).
).![]()
1.2. Виды проекций
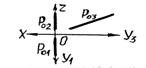
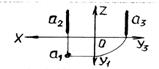
1.2.1. Наиболее полно требованиям к чертежам ( наглядность, обратимость, простота, точность ) отвечают ортогональные проекции, которые явились основой для создания в 1798 году французским математиком Г. Монжем систематизированного учебника по начертательной геометрии. Метод Монжа предусматривает получение изображений на две-три взаимно перпендикулярные плоскости ( рис.1.3а ): П1 - горизонтальная плоскость, П2 - фронтальная и П3 – профильная плоскости с последующим их совмещением в одну плоскость (рис.3б). Соответственно А1, A2, A3 – горизонтальная, фронтальная и профильная проекции точки. Для чтения эпюра необходимо мысленно свернуть плоскости в пространственную систему Оxyz и восстановить проецирующие лучи в пространстве.
1.2.2. Косоугольное параллельное проецирование положено в основу метода аксонометрических проекций, сущность которого заключается в том, что объект проецируется на единственную плоскость П' вместе с некоторой системой координат ( рис.1.3в ).
Рис 1.3. Виды проекций: а, б – прямоугольные; в – аксонометрические,
г – перспективные; д, е – с числовыми отметками.
Ортогональные и аксонометрические проекции являются основными при проектировании большинства изделий. При проектировании строительных объектов дополнительно применяются проекции с числовыми отметками и перспективные проекции.
1.2.3. Перспективные проекции основаны на применении центрального проецирования и представляют собой изображение объектов на картинную плоскость ( рис.1.3г ). Перспективы отличаются хорошей наглядностью, т. к. соответствуют тем кажущимся изменениям величин и очертаний объектов, которые обусловлены их удаленностью от точки наблюдения и их положением в пространстве. Однако они трудоемки в исполнении и плохо измеримы.
1.2.4. В проекциях с числовыми отметками строительный объект ( полотно железной или шоссейной дороги, аэродромы, площадки и т. п. ) проецируются ортогонально только на одну плоскость нулевого уровня. Высота точек объекта от этой плоскости указывается отметками – числами в виде индексов к обозначениям проекций. Такие чертежи называются планами ( рис.1.3д, е ).
1.3. Ортогональные проекции точки, прямой,
плоскости, многогранников
1.3.1. Две плоскости делят пространство на 4, а три плоскости – на 8 октантов ( см. рис.1.3а ). Чтобы определить положение точки в любом октанте, устанавливают знаки координат. Координаты точки – это расстояния от точки до плоскостей проекций. Точка в пространстве определяется тремя координатами, каждая из ( трех ) проекций точки определяется двумя координатами: А(x,y.z), A1(x,y), A2(x,z), A3(y,z). Координаты точки могут быть равными нулю и отрицательными. Тогда точка может лежать на плоскости проекций или находиться в любом из 8 октантов. Значения координат и эпюры точек при различных положениях точки даны в табл.1.1 и табл.1.2. Две проекции точки вполне определяют положение точки в пространстве.
Таблица 1.1
Точка в октантах II…VIII
тант (чет-верть) | Знакикоординат X Y Z | Эпюр | ||
II | + | − | + |
|
III | + | − | − |
|
IV | + | + | − |
|
V | − | + | + |
|
VI | − | − | + |
|
VII | − | − | − |
|
VIII | − | + | − |
|
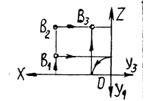
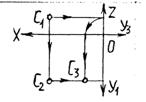
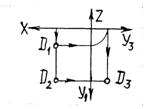
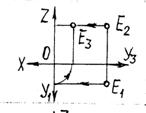
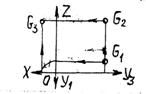
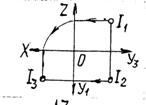
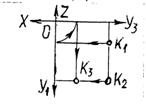
Таблица 1.2
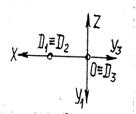
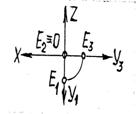
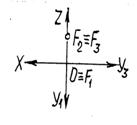
Точка в плоскости и на оси
точки | Координата X Y Z | Эпюр | ||
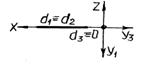
A Є П1 Z = 0 | X | Y | O |
|
В Є П2 Y = 0 | X | O | Z |
|
С Є П3 X = 0 | O | Y | Z |
|
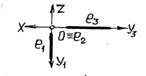
D ЄОx Y=Z=0 | X | O | O |
|
E Є Oy X=Z=0 | O | Y | O |
|
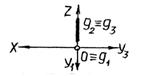
F Є Oz X=Y=0 | O | O | Z |
|

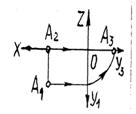
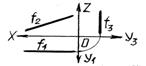
1.3.2. Прямая линия определяется двумя точками, поэтому прямая считается заданной, если на эпюре даны проекции двух ее точек, включая ее следы – точки пересечения плоскостей проекций. Две проекции прямой определяют положение прямой в пространстве. Проекция прямой – в общем случае – прямая линия. Прямые могут занимать различные положения по отношению к плоскостям проекций. Прямая общего положения – это прямая наклоненная к П1, П2, П3 ( рис.1.4 ).
Рис 1.4. Изображения прямой общего положения.
Прямые частного положения подразделяются на прямые уровня (параллельные П ) и проецирующие ( перпендикулярные П ). Характерные особенности этих прямых и их проекций в первом октанте приведены в табл.1.3.
Таблица 1.3
Прямые частного положения.
Наименование и положение прямой |
Эпюр |
1. Уровня горизонтальная h ║ П1 |
|
2. Уровня фронтальная f ║ П2 |
|
3. Уровня профильная p ║ П3 |
|
4. Горизонталь нулевого уровня h Є П1 |
|
5.Тоже, фронталь f Є П2 |
|
6. Тоже, профильная p Є П3 |
|
7. Горизонтально проецирующая a ┴ П1 |
|
8. Фронтально проецирующая b ┴ П2 |
|
9. Профильно проецирующая c ┴ П3 |
|
10. Прямая на оси X d ≡ Ox |
|
11. Тоже, на оси Y e ≡ Oy |
|
12. Тоже, на оси Z g ≡ Oz |
|

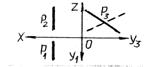
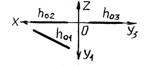
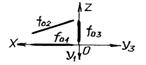
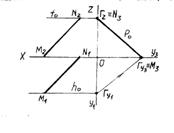
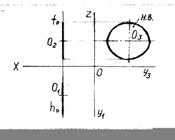
1.3.3. Плоскость определяется тремя точками, не лежащими на одной прямой; прямой и точкой, не принадлежащей прямой; двумя пересекающимися прямыми; двумя параллельными прямыми; плоской фигурой (рис.1.5а, б,в, г), а также следами. След плоскости – это линия пересечения плоскости с плоскостями проекций. В общем случае плоскость может иметь три следа: горизонтальный h0![]() , фронтальный f0
, фронтальный f0![]() , профильный p0 . Треугольник Σx Σy Σz называется треугольником следов ( рис.1.5д ). Треугольник следов может быть замкнут в I октанте (рис.1.5д) или в IV октанте (см. рис.1.5е). При этом следы f0
, профильный p0 . Треугольник Σx Σy Σz называется треугольником следов ( рис.1.5д ). Треугольник следов может быть замкнут в I октанте (рис.1.5д) или в IV октанте (см. рис.1.5е). При этом следы f0![]() и h0
и h0![]() могут совпадать, если плоскость равнонаклонена к П1 и П2.
могут совпадать, если плоскость равнонаклонена к П1 и П2.
Рис 1.5. Изображения плоскости.
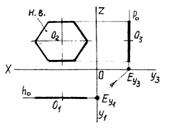
Плоскости относительно плоскостей проекций также занимают различные положения: плоскости общего положения наклонены ко всем плоскостям проекций ( см. рис.1.5 ) ; плоскости уровня – параллельны плоскостям проекций; плоскости проецирующие – перпендикулярны плоскостям проекций. Характерные особенности плоскостей частного положения приведены в табл.1.4.
Таблица 1.4
Плоскости частного положения
Наименование и положение плоскости |
Эпюр |
1. Горизонтально проецирующая A ┴ П1 |
|
2. Фронтально проецирующая B ┴ П2 |
|
3. Профильно проецирующая Г ┴ П3 |
|
4. Уровня горизонтальная ∆ ║ П1 |
|
5. Уровня фронтальная Е ║ П2 |
|
6. Уровня профильная Z ║ П3 |
|

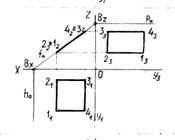
1.3.4. Многогранники представляют собой тела, ограниченные несколькими плоскостями т. е. гранями. Изображение многогранников сводится к изображению ребер ( линий пересечения граней ) и вершин ( точек пересечения ребер ). Простейший многогранник – четырехгранник – изображается четырьмя вершинами и шестью ребрами. Построение других многогранников (пирамид и призм) подобно четырехграннику ( рис.1.6 ).
Рис 1.6. Изображения многогранников на эпюре: а – пирамиды, б – призмы,
г – гексаэдра (куба).
Известны пять правильных многогранников ( платоновы тела ), гранями которых являются правильные многоугольники. Тетраэдр – 4 грани – равносторонние треугольники; гексаэдр ( куб ) – 6 граней – квадратов; октаэдр – 8 граней – равносторонних треугольников; додекаэдр – 12 граней – пятиугольников ( пентагонов ); икосаэдр – 20 граней – правильных треугольников. Для любого выпуклого многогранника число вершин (В), ребер (Р) и граней (Г) связаны формулой Эйлера: В – Р + Г = 2.
Если грани многогранника перпендикулярны какой-либо плоскости, то он занимает по отношению к ней частное положение ( см. рис.1.6в ). При построении многогранников нужно устанавливать видимость ребер методом конкурирующих точек: на плоскости П1 будет видна одна из двух точек (1,2) проецирующей прямой, у которой координата Z больше ( Z1 > Z2 ); на плоскости П2 - та, у которой координата Y больше ( Y4 > Y3 ). Следовательно будут видны те ребра, точки которых видны ( см. рис.1.6а ).
1.4. Ортогональные проекции кривых линий
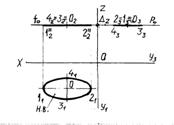
1.4.1. Кривую линию можно рассматривать как траекторию движения точки в пространстве или совокупность точек, удовлетворяющих определенному уравнению. Кривые линии подразделяются на плоские и пространственные, на алгебраические, трансцендентные и эмпирические, монотонные и составные ( рис.1.7 ).
Рис 1.7. Изображения кривых линий: а, в – пространственных, б, г – плоских,
д – винтовой линии.
Для построения ортогональных проекций кривой нужно построить проекции ряда точек, принадлежащих этой кривой и соединить между собой одноименные проекции в той последовательности, в какой они находятся в оригинале. Чтобы решить по эпюру, какая кривая в натуре ( плоская или пространственная ), нужно произвольно провести две хорды. Если хорды пересекаются – кривая плоская, если скрещиваются – пространственная ( см. рис.1.7в ). Классическим примером плоской кривой является окружность, которая может проецироваться на плоскость в линию, в окружность и в общем случае в виде эллипса ( см. рис.1.7г ). При проецировании окружности любая пара ее взаимно перпендикулярных диаметров проецируется парой сопряженных диаметров эллипса. Диаметр (1-2) окружности, параллельной плоскости П проецируется без искажения и является для эллипса – проекции большой осью (11-21). Примером пространственной кривой является винтовая линия ( см. рис.1.7д ).
1.5. Ортогональные проекции поверхностей
Под поверхностью подразумевается непрерывное множество точек. Поверхности так же могут быть алгебраическими и трансцендентными.
Множество точек или линий, определяющих поверхность, называется ее каркасом.
1.5.1. В начертательной геометрии поверхность рассматривается как совокупность всех последовательных положений некоторой линии, называемой образующей, перемещающейся в пространстве по определенному закону. Закон образования поверхности графически задается в виде линий образующих (l) и направляющих (m) .Этот способ образования поверхности называется кинематическим, а элементы поверхности – определителем.
1.5.2. Чтобы задать поверхность на чертеже, достаточно указать проекции ее определителя – образующих и направляющих (рис.1.8а ). В ряде случаев поверхность удобно задавать ее очерком – следом на плоскости проекций огибающей цилиндрической поверхности, а для поверхности вращения – осью вращения, проекциями экватора и главного меридиана ( рис.1.8б ).
Рис 1.8. Изображения поверхности кинематическим способом и очерком поверхности вращения.
1.5.3. Многообразие форм поверхностей создает большие трудности при их анализе. В основу их систематизации может быть положено единство способа их образования – определитель: Ф (Г) [A].
Геометрическая часть (Г) включает образующие – прямые (ā) и кривые (ã) линии. Криволинейные образующие могут быть постоянного и переменного вида. По этому признаку поверхности подразделяются на линейчатые и нелинейчатые. Первые могут иметь одну, две, три направляющие (m), которые также могут быть прямыми и кривыми линиями.
Алгоритмическая часть определителя [A] может содержать закон перемещения образующей и закон изменения формы образующей [ A1 ]. По этим признакам поверхности можно разделить на классы, подклассы, группы, виды. Некоторые из указанных поверхностей приведены в табл.1.5.
Таблица.1.5.
Поверхности
Поверхность класс, подкласс, вид определителя | Наглядное изображение |
1. Поверхности нелиней- чатые (класс 1) с образующей перемен- ного вида Ф (ă,m) [A, A1] |
|
2. То же, с образующей постоянного вида Ф (ă,m) [A] |
|
3. Поверхности линей- чатые (класс 2) с тремя направляющими Ф (ā,m1,m2,m3)...[A] |
|
4. То же, с двумя направ- ляющими Ф (ā, m1,m2)...[A] |
|
5. То же, с одной направ- ляющей Ф (ā, m) [A] |
|
6. Поверхности парал- лельного переноса (подкласс 1) Ф (ă,m) [A] |
|
7. Поверхности вращения (подкласс 2) Ф (а, m) [A] |
|
8. Винтовые поверхности (подкласс 3) Ф (ā, m1,m2) [A] |
|